簡(jiǎn)介
機(jī)械手,通常被稱為機(jī)器人手臂,是一種可以模擬人類手部動(dòng)作的自動(dòng)化設(shè)備,廣泛應(yīng)用于工業(yè)制造、醫(yī)療手術(shù)、實(shí)驗(yàn)室操作等領(lǐng)域。機(jī)械手通過(guò)精確的控制和高度的靈活性,能夠執(zhí)行各種復(fù)雜的任務(wù),如抓取、搬運(yùn)、組裝和加工等,從而提高了生產(chǎn)效率和操作精度。
機(jī)械手的核心組成部分包括機(jī)械結(jié)構(gòu)、驅(qū)動(dòng)系統(tǒng)、傳感器、控制系統(tǒng)和末端執(zhí)行器。機(jī)械結(jié)構(gòu)通常由鋁合金、鋼材或高強(qiáng)度塑料制成,構(gòu)成機(jī)械手的“骨架”,以確保其強(qiáng)度和耐用性。驅(qū)動(dòng)系統(tǒng)則負(fù)責(zé)實(shí)現(xiàn)機(jī)械手的運(yùn)動(dòng),常用的驅(qū)動(dòng)方式有電動(dòng)伺服電機(jī)、氣動(dòng)缸和液壓缸。伺服電機(jī)提供高精度的角度和位置控制,適合需要精細(xì)操作的場(chǎng)合;氣動(dòng)和液壓缸則適用于需要大力矩和快速動(dòng)作的應(yīng)用。
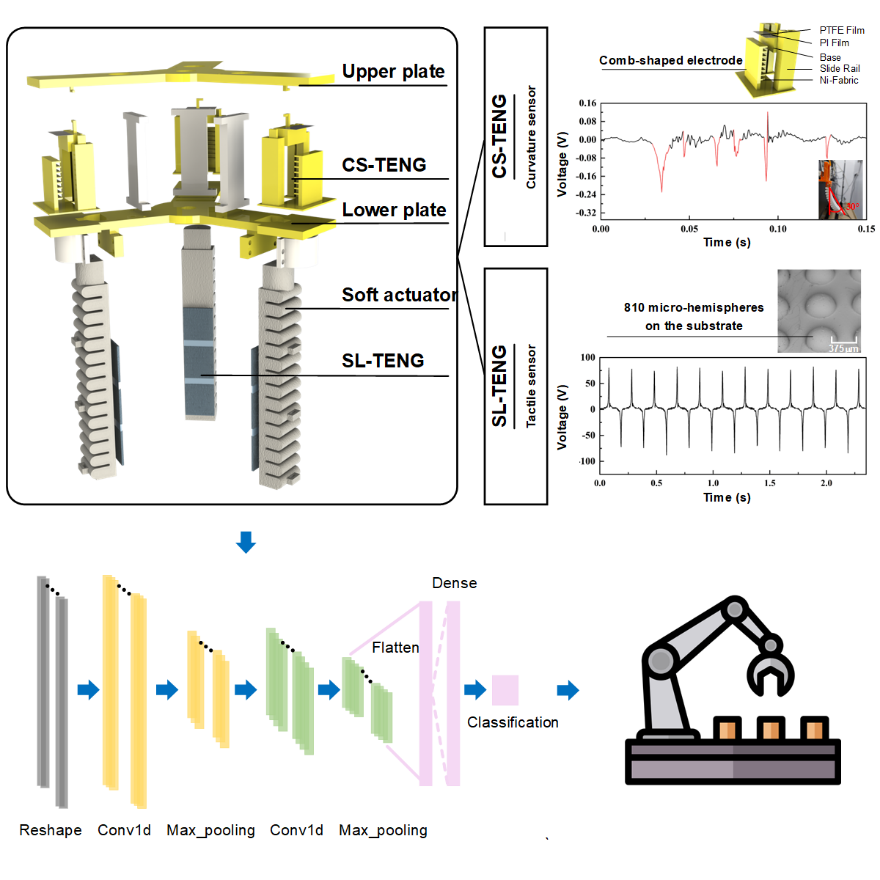
傳感器在機(jī)械手中扮演著重要角色,負(fù)責(zé)實(shí)時(shí)監(jiān)測(cè)機(jī)械手的狀態(tài)和環(huán)境。例如,位置傳感器(如光學(xué)編碼器)用于跟蹤手臂的運(yùn)動(dòng)位置,力傳感器用于感知抓取物體的力度。通過(guò)這些傳感器提供的數(shù)據(jù),控制系統(tǒng)可以對(duì)機(jī)械手的動(dòng)作進(jìn)行調(diào)整,確保操作的準(zhǔn)確性和穩(wěn)定性。
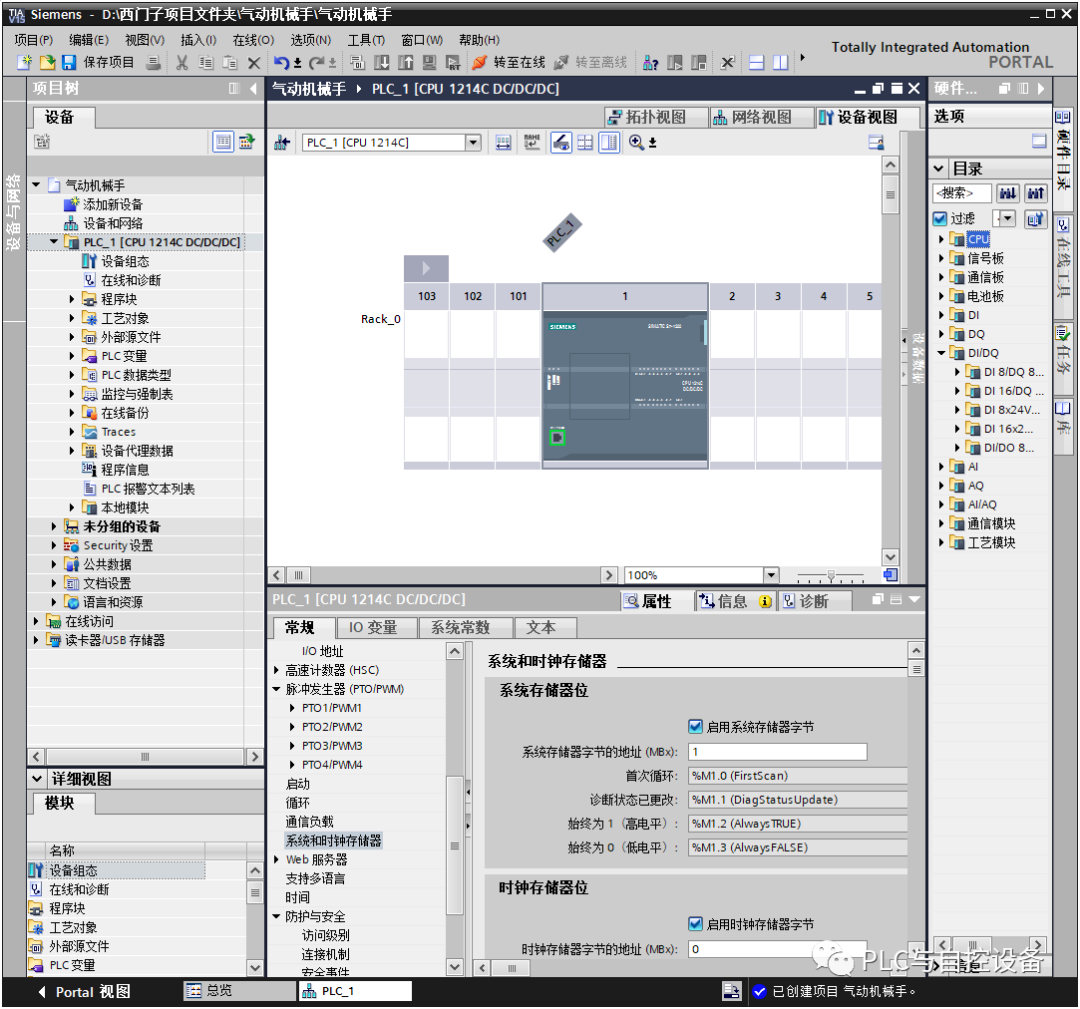
控制系統(tǒng)是機(jī)械手的“大腦”,負(fù)責(zé)處理傳感器數(shù)據(jù)并發(fā)出控制指令。控制系統(tǒng)通常由微處理器或可編程邏輯控制器(PLC)組成,通過(guò)高級(jí)控制算法(如逆運(yùn)動(dòng)學(xué)、路徑規(guī)劃)實(shí)現(xiàn)復(fù)雜的操作任務(wù)。現(xiàn)代控制系統(tǒng)還支持通過(guò)圖形用戶界面(GUI)或編程語(yǔ)言進(jìn)行配置和編程,使得機(jī)械手能夠靈活地適應(yīng)不同的任務(wù)需求。
末端執(zhí)行器是機(jī)械手的“手”部分,用于執(zhí)行具體的操作任務(wù)。末端執(zhí)行器的種類繁多,包括夾爪、吸盤、焊接工具和噴涂槍等,能夠根據(jù)任務(wù)的需求選擇合適的工具。例如,夾爪適用于搬運(yùn)和組裝任務(wù),吸盤適用于處理平滑表面的物體,而焊接工具和噴涂槍則用于加工和處理材料。
機(jī)械手的應(yīng)用領(lǐng)域極為廣泛。在工業(yè)制造中,機(jī)械手用于自動(dòng)化生產(chǎn)線,實(shí)現(xiàn)物料搬運(yùn)、組裝、焊接、噴涂等功能,顯著提高生產(chǎn)效率和產(chǎn)品質(zhì)量。在醫(yī)療領(lǐng)域,機(jī)械手被用于機(jī)器人輔助手術(shù),如達(dá)芬奇手術(shù)機(jī)器人,通過(guò)精確操作幫助醫(yī)生進(jìn)行復(fù)雜的手術(shù)。在實(shí)驗(yàn)室環(huán)境中,機(jī)械手用于自動(dòng)化實(shí)驗(yàn)操作、樣品處理和數(shù)據(jù)采集,提高實(shí)驗(yàn)的效率和重復(fù)性。
機(jī)械手的技術(shù)挑戰(zhàn)主要包括控制精度、可靠性和適應(yīng)性。為了實(shí)現(xiàn)高精度的操作,需要高質(zhì)量的傳感器和控制系統(tǒng)。此外,機(jī)械手在復(fù)雜和動(dòng)態(tài)環(huán)境下的穩(wěn)定性也是一個(gè)重要問(wèn)題,需要設(shè)計(jì)靈活的結(jié)構(gòu)和驅(qū)動(dòng)系統(tǒng)來(lái)應(yīng)對(duì)各種工作條件。
總結(jié)而言,機(jī)械手作為一種先進(jìn)的自動(dòng)化設(shè)備,通過(guò)其高效、精確的操作能力,廣泛應(yīng)用于工業(yè)、醫(yī)療和科研等多個(gè)領(lǐng)域。隨著技術(shù)的不斷進(jìn)步,機(jī)械手的功能和性能也在持續(xù)提升,為提高生產(chǎn)效率、改進(jìn)醫(yī)療服務(wù)和推動(dòng)科學(xué)研究提供了強(qiáng)有力的支持。
相關(guān)討論





推薦內(nèi)容
 視頻
視頻
采用Flexis AC MCU的機(jī)械手
機(jī)器人學(xué)
智能控制系統(tǒng)
工業(yè)4.0導(dǎo)論
創(chuàng)客機(jī)器人PK舞臺(tái)
Arduino創(chuàng)意集錦
直播回放: ADI 易于驅(qū)動(dòng)SAR型ADC的原理、優(yōu)點(diǎn)及應(yīng)用介紹
直播回放: 中星聯(lián)華 大咖面對(duì)面,輕松玩轉(zhuǎn)高速 ADC 性能測(cè)試
AI人工智能深度學(xué)習(xí)(RV1126)-第3期 AI模型部署與項(xiàng)目實(shí)戰(zhàn)篇
直播回放: Microchip 利用motorBench?開(kāi)發(fā)套件高效開(kāi)發(fā)電機(jī)磁場(chǎng)定向控制方案
直播回放: 嵌入式Rust入門基礎(chǔ)知識(shí)、解析動(dòng)手實(shí)戰(zhàn)Rust的三個(gè)任務(wù)
直播回放: TI 全新推出極具性價(jià)比的通用型處理器 AM62L
直播回放: ADI 超低功耗 MCU MAX326xx 系列介紹
直播回放: 2025是德科技數(shù)字月-數(shù)字新品來(lái)助陣
直播回放: SiLabs 全新藍(lán)牙信道探測(cè):從技術(shù)創(chuàng)新到實(shí)際應(yīng)用
直播回放: Fluke 高精度測(cè)溫賦能電子制造
 下載
下載
斯坦福大學(xué) AI 機(jī)械手項(xiàng)目 Aloha
機(jī)械手臂結(jié)構(gòu)優(yōu)化設(shè)計(jì)論文
Robot機(jī)器人和機(jī)械手控制系統(tǒng)論文
機(jī)械手的控制 58頁(yè) 0.7M.ppt
機(jī)械手的運(yùn)動(dòng) 41頁(yè) 0.9M.ppt
機(jī)器人機(jī)械手—數(shù)學(xué)·程序編制與控制 285頁(yè) 3.8M
HCR機(jī)械手機(jī)械圖紙
7公斤6軸機(jī)械手機(jī)械圖紙
6軸機(jī)械手模型機(jī)械圖紙
單片機(jī)控制機(jī)械手臂的設(shè)計(jì)與制作
機(jī)械手的控制 58頁(yè) 0.7M.ppt
機(jī)械手的運(yùn)動(dòng) 41頁(yè) 0.9M.ppt
換刀機(jī)械手設(shè)計(jì)
仿生機(jī)器人制作之二_三自由度機(jī)械手
基于DSP的機(jī)械手控制系統(tǒng)
A2-3d圖六軸機(jī)械手Soildworks圖紙
 設(shè)計(jì)資源
設(shè)計(jì)資源
【訓(xùn)練營(yíng)】機(jī)械手臂
【訓(xùn)練營(yíng)】仿生機(jī)械手
11自由度機(jī)械手驅(qū)動(dòng)+力反饋
11自由度機(jī)械手驅(qū)動(dòng)+力反饋
換刀機(jī)械手設(shè)計(jì)
嵌入式綜合設(shè)計(jì)
【物聯(lián)網(wǎng)】鴻蒙WIFI開(kāi)關(guān)
無(wú)線可穿戴式表面肌電信號(hào)采集與監(jiān)測(cè)系統(tǒng)
PLC光源機(jī)械手上泡控制電路
機(jī)械手行車控制電路
機(jī)械手電機(jī)驅(qū)動(dòng)電路
555工業(yè)機(jī)械手簡(jiǎn)易程控電路
簡(jiǎn)易無(wú)線耳麥的制作
具有反向工作進(jìn)給的機(jī)械動(dòng)力滑臺(tái)控制電路
基于無(wú)線通信的嵌入式機(jī)器人控制系統(tǒng)電路設(shè)計(jì)
Y3150滾齒機(jī)控制電路