簡介
卡爾曼濾波(Kalman Filter)是一種用于估計動態系統狀態的數學算法,由美國工程師魯道夫·卡爾曼(Rudolf E. Kálmán)于1960年提出。它廣泛應用于控制系統、信號處理、導航、機器人技術等領域,是處理帶有噪聲數據的動態系統中的一種重要工具。
卡爾曼濾波的基本原理
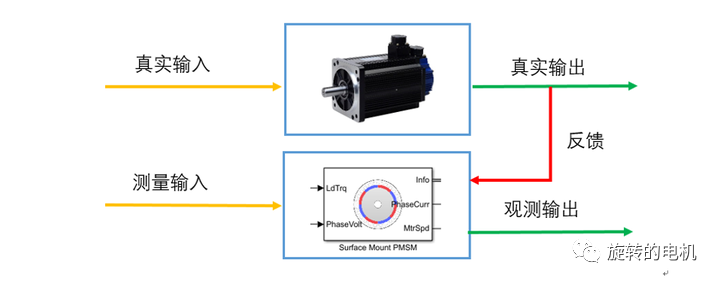
卡爾曼濾波基于線性系統的狀態空間模型,通過遞歸算法對系統的狀態進行估計和預測。其主要目標是從帶有噪聲的觀測數據中提取最優估計值,從而提高系統的精度和可靠性。卡爾曼濾波的基本步驟包括預測和更新兩個階段:
預測階段:
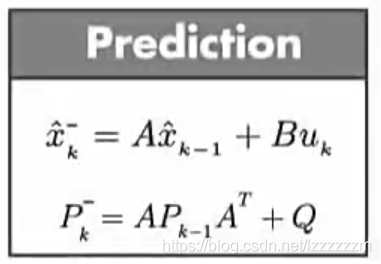
- 狀態預測:根據當前系統狀態和控制輸入,使用狀態轉移方程預測下一時刻的系統狀態。狀態轉移方程通常表示為:
其中, 是預測的系統狀態, 是狀態轉移矩陣, 是控制輸入矩陣, 是控制輸入。 - 協方差預測:預測下一時刻的估計誤差協方差矩陣,用于表示預測誤差的可信度。協方差預測方程為:
其中, 是預測的協方差矩陣, 是過程噪聲協方差矩陣。
- 狀態預測:根據當前系統狀態和控制輸入,使用狀態轉移方程預測下一時刻的系統狀態。狀態轉移方程通常表示為:
更新階段:
- 觀測更新:將新獲得的觀測數據與預測值進行融合,使用觀測更新方程修正預測的狀態和協方差。觀測更新方程為:
其中, 是卡爾曼增益, 是觀測矩陣, 是觀測噪聲協方差矩陣。 - 狀態更新:根據觀測數據和卡爾曼增益更新狀態估計:
其中, 是實際觀測值。 - 協方差更新:更新狀態估計的協方差矩陣:
- 觀測更新:將新獲得的觀測數據與預測值進行融合,使用觀測更新方程修正預測的狀態和協方差。觀測更新方程為:
卡爾曼濾波的應用領域
導航與定位:
控制系統:
- 自動駕駛:在自動駕駛汽車中,卡爾曼濾波用于融合雷達、激光雷達和攝像頭的數據,進行目標跟蹤和路徑規劃。
- 無人機控制:在無人機的飛行控制系統中,卡爾曼濾波用于實時估計無人機的位置和姿態,以實現穩定的飛行控制。
信號處理:
- 噪聲抑制:在信號處理領域,卡爾曼濾波用于去除信號中的噪聲,提高信號的質量和準確性。
- 數據融合:在多傳感器系統中,卡爾曼濾波用于融合來自不同傳感器的數據,提高系統的整體性能。
金融工程:
- 市場預測:在金融領域,卡爾曼濾波用于預測股票市場和其他金融指標的動態變化,幫助進行決策支持和風險管理。
卡爾曼濾波的優勢與挑戰
優勢:
- 實時性:卡爾曼濾波是一種遞歸算法,能夠在實時系統中進行快速計算,適用于在線處理。
- 最優性:在假設系統是線性的且噪聲為高斯分布的情況下,卡爾曼濾波能夠提供最優的狀態估計。
挑戰:
- 線性假設:傳統的卡爾曼濾波器假設系統是線性的,面對非線性系統時需要使用擴展卡爾曼濾波(EKF)或無跡卡爾曼濾波(UKF)等變種。
- 噪聲假設:卡爾曼濾波假設過程噪聲和觀測噪聲均為高斯分布,當實際噪聲特性偏離這些假設時,濾波效果可能會受到影響。
總結
卡爾曼濾波是一種強大的遞歸估計算法,廣泛應用于動態系統的狀態估計和數據融合。其核心思想是通過預測和更新兩個階段對系統狀態進行最優估計,具有廣泛的應用價值和優良的性能。盡管卡爾曼濾波在處理線性系統時表現出色,但在面對非線性系統時仍需采用相應的擴展方法。理解卡爾曼濾波的基本原理和應用領域,有助于在實際工程中充分發揮其強大的數據處理和狀態估計能力。
相關討論





推薦內容
 視頻
視頻
卡爾曼濾波器
理解卡爾曼濾波器(英語中字)
電力工程信號處理應用
了解傳感器融合和追蹤
數學線性系統理論
人工智能 江西理工 羅會蘭
隨機信號處理 國防科大
直播回放: ADI 易于驅動SAR型ADC的原理、優點及應用介紹
直播回放: 中星聯華 大咖面對面,輕松玩轉高速 ADC 性能測試
AI人工智能深度學習(RV1126)-第3期 AI模型部署與項目實戰篇
直播回放: Microchip 利用motorBench?開發套件高效開發電機磁場定向控制方案
直播回放: 嵌入式Rust入門基礎知識、解析動手實戰Rust的三個任務
直播回放: TI 全新推出極具性價比的通用型處理器 AM62L
直播回放: ADI 超低功耗 MCU MAX326xx 系列介紹
直播回放: 2025是德科技數字月-數字新品來助陣
直播回放: SiLabs 全新藍牙信道探測:從技術創新到實際應用
 下載
下載
ADAS系統視覺與毫米波雷達分布式抗差卡爾曼濾波融合算法
控制之美(卷2)——最優化控制MPC與卡爾曼濾波器 (王天威,黃軍魁)
自適應卡爾曼對儲能鋰電池充放電狀態的估算
卡爾曼濾波與組合導航原理(第3版) (秦永元 張洪鉞 汪叔華)
遺傳算法優化雙卡爾曼濾波的鋰電池SOC估算
卡爾曼濾波與組合導航原理 第2版 秦永元
卡爾曼濾波及其實時應用 5版
卡爾曼濾波與組合導航原理
卡爾曼濾波器介紹
卡爾曼濾波算法
卡爾曼濾波原理及應用仿真
鎖相環與卡爾曼濾波器
卡爾曼濾波器及其應用基礎
(英文版)MATLAB在卡爾曼濾波器中應用的理論與實踐KalmanfilteringtheoryandpracticeusingMATLAB-email
一個簡單的卡爾曼濾波C程序
MATLAB 對卡爾曼濾波器的仿真實現.pdf
 設計資源
設計資源
姿態傳感器-MPU6050-卡爾曼/DMP姿態解算
卡爾曼濾波版平衡小車源碼
卡爾曼濾波平衡小車源碼
Speeduino 開源ECU:基于 Arduino 的發動機管理
JetCar:基于 Jetson Nano 的微型自動駕駛汽車
CANable:基于stm32f0的小型低成本開源 USB轉CAN適配器
采用STM32F072調節TX4211和SY6345的袖珍實驗電源
WiCAN:開源 ESP32-C3 CAN 適配器,支持 USB、Wi-Fi 和 BLE
ESP所用傳感器的接口技術電路解析
ESP中傳感器及接口技術的電路解析
哪種TVS二極管適用于RS232/RS485和控制器局域網應用
RS-485收發器為什么要端接?如何端接?
如何識別共模干擾?消除共模干擾的方法
過零檢測電路的原理集優缺點
一文知道運算放大器的硬性要求
運算放大器的理想特性/引腳配置/增益類型/主要應用