一、什么是步進電機
步進電機是將電脈沖信號,轉變為角位移或線位移的開環控制電機,又稱為脈沖電機。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響。當步進驅動器接收到一個脈沖信號時,它就可以驅動步進電機按設定的方向轉動一個固定的角度,稱為“步距角”。

步進電機的旋轉是以固定的角度一步一步運行的,可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的,同時可以通過控制脈沖頻率,來控制電機轉動的速度和加速度,從而達到調速的目的。步進電機多用于數字式計算機的外部設備,以及打印機、繪圖機和磁盤等裝。
二、步進電機的特點:
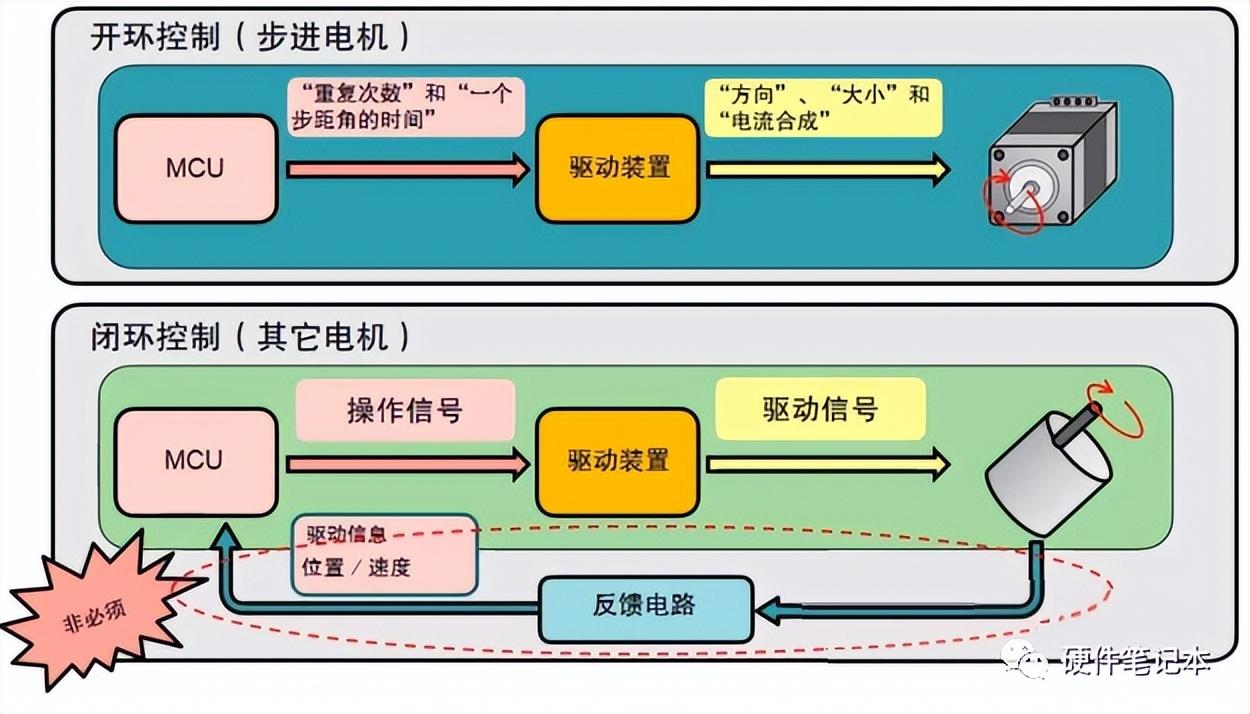
步進電機工作時的位置和速度信號不反饋給控制系統,如果電機工作時的位置和速度信號反饋給控制系統,那么它就屬于伺服電機。相對于伺服電機,步進電機的控制相對簡單,但不適用于精度要求較高的場合。
步進電機的優點和缺點都非常的突出,優點集中于控制簡單、精度高,缺點是噪聲、震動和效率,它沒有累積誤差,結構簡單,使用維修方便,制造成本低。步進電機帶動負載慣量的能力大,適用于中小型機床和速度精度要求不高的地方,缺點是效率較低、發熱大,有時會“失步”。優缺點如下所示。
優點:
1. 電機操作易于通過脈沖信號輸入到電機進行控制;
2. 不需要反饋電路以返回旋轉軸的位置和速度信息(開環控制);
3. 由于沒有接觸電刷而實現了更大的可靠性。
缺點:
1. 需要脈沖信號輸出電路;
2. 當控制不適當的時候,可能會出現同步丟失;
3. 由于在旋轉軸停止后仍然存在電流而產生熱量。
三、步進電機的分類:
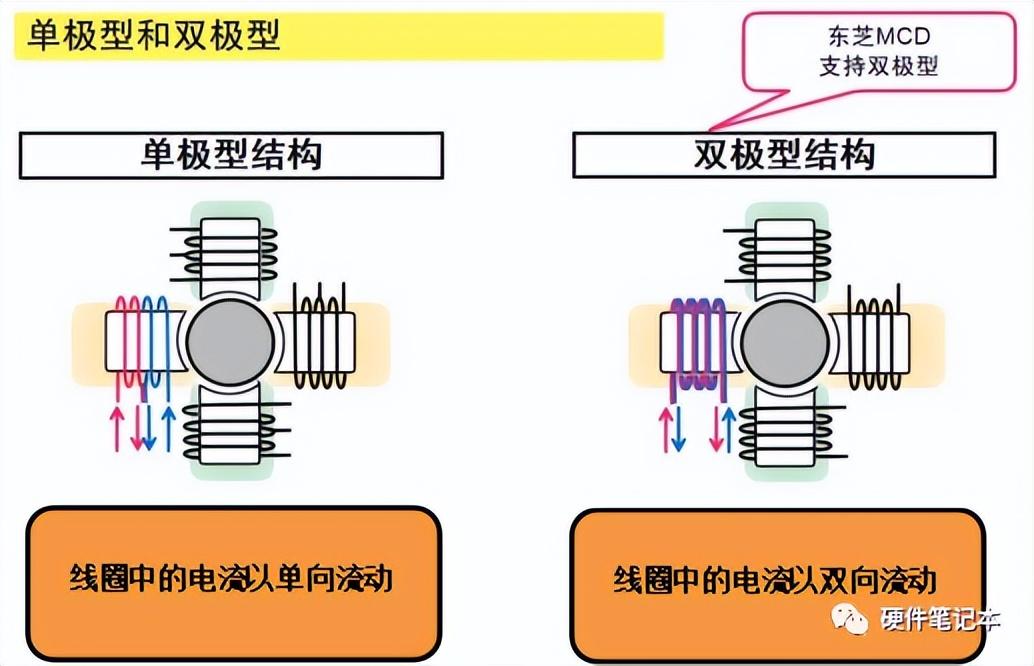
在相同電流且相同轉矩輸出的條件下,單極型步進電機比雙極型步進電機多一倍的線圈,成本更高,控制電路的結構也不一樣,目前市場上流行的大多是雙極型步進電機。
步進電機在構造上通常主要按照轉子特點和定子繞組進行分類,下面將詳細介紹這兩種類型的分類。
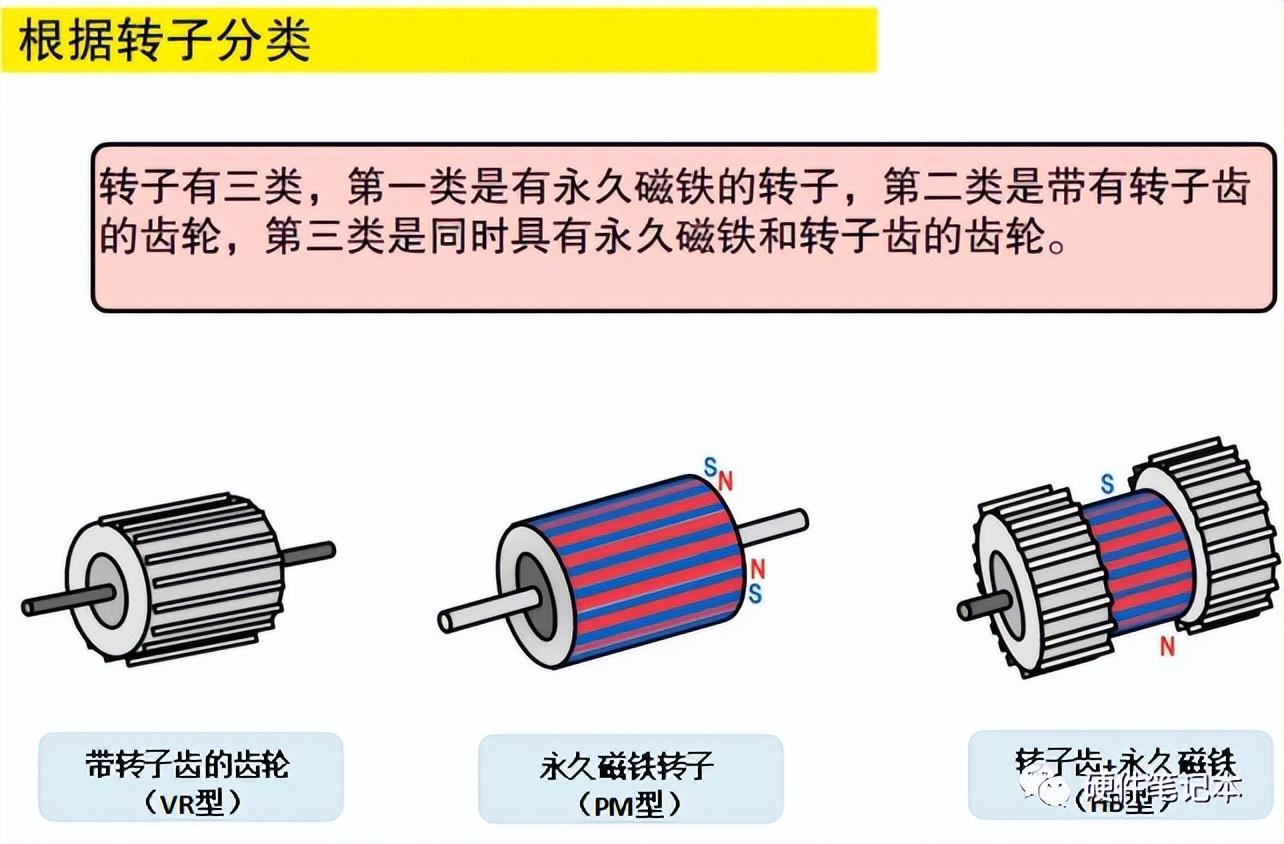
按照轉子分類,有三種主要類型:反應式(VR型)、永磁式(PM型)、混合式(HB型)。
反應式
定子上有繞組,繞組由軟磁材料組成。其結構簡單、成本低、步距角小,可達1.2度,但動態性能差,效率低、發熱大,可靠性難以保證。
永磁式
永磁式步進電機的轉子用永磁材料制成,轉子的極數與定子的極數相同。其特點是動態性能好、輸出力矩大,但這種電機度差,步距角大(一般為7.5度或15度)。
混合式
混合式步進電機綜合了反應式和永磁式的優點,其定子上有很多相繞組,轉子上采用永磁材料,轉子和定子均有多個小齒以提高步距精度。其特點是輸出力矩大、動態性能好、步距角小,但結構復雜、成本相對較高。
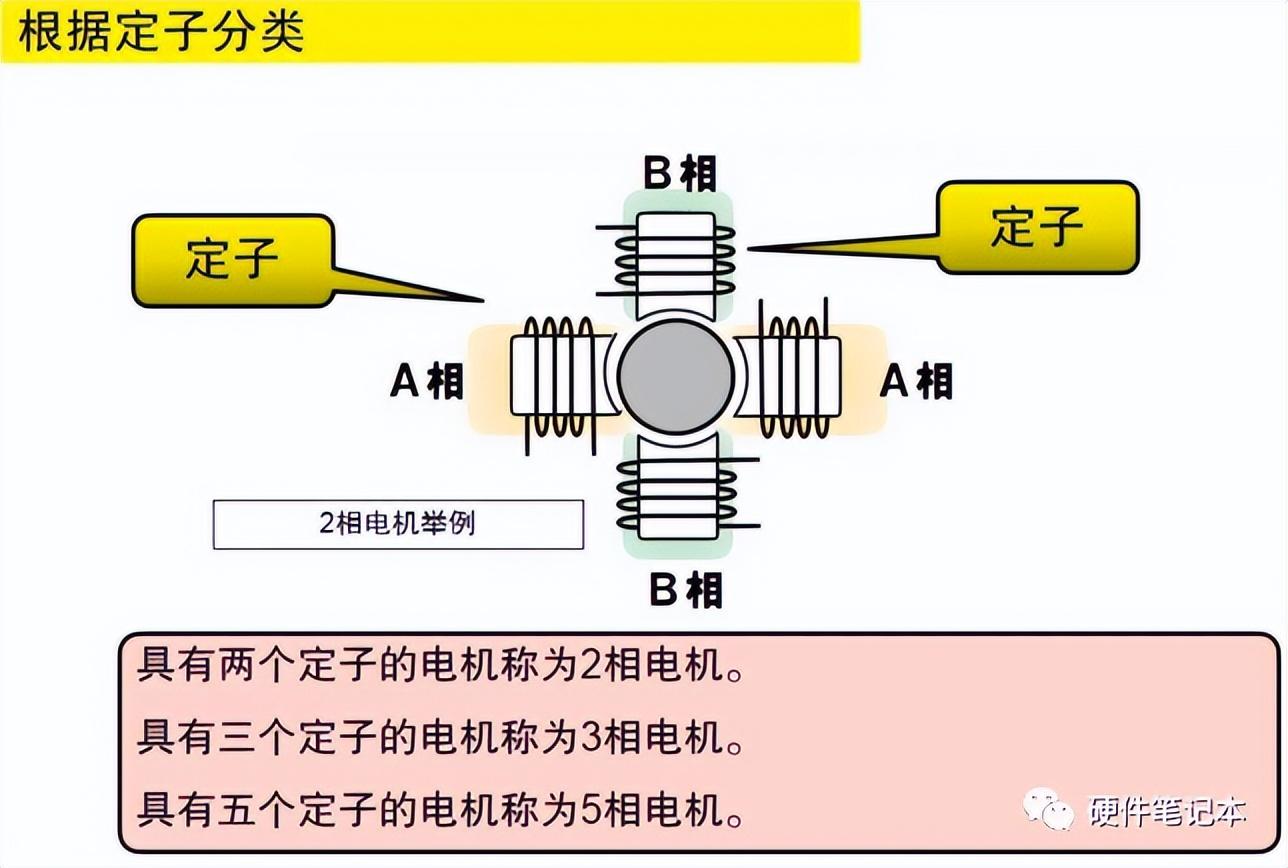
步進電機按照定子上繞組來分類,共有二相、三相和五相等系列。目前最受歡迎的是兩相混合式步進電機,約占97%以上的市場份額,其原因是性價比高,配上細分驅動器后效果良好。
該種電機的基本步距角為1.8度/步,配上半步驅動器后,步距角減少為0.9度,配上細分驅動器后。其步距角可細分達256倍(0.007度/微步)。由于摩檫力和制造精度等原因,實際控制精度略低。同一步進電機可配不同細分的驅動器以改變精度的效果。
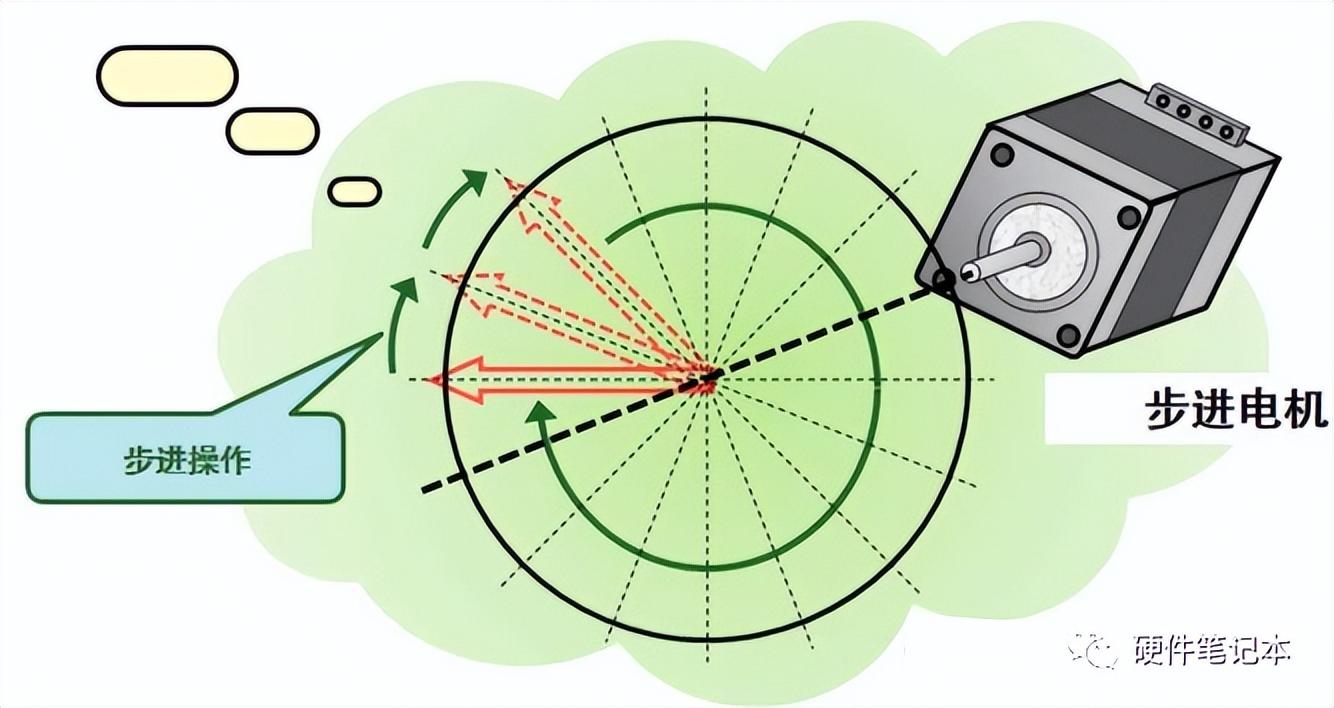
四、步進電機的工作原理:
步進電機是通過脈沖信號來進行控制,每輸入一個脈沖信號,步進電機前進一步。步進電機旋轉的步距角,是在電機結構的基礎上等比例控制產生的,如果控制電路的細分控制不變,那么步進旋轉的步距角在理論上是一個固定的角度。在實際工作中,電機旋轉的步距角會有微小的差別,主要是由于電機結構上的固定有誤差產生的,而且這種誤差不會積累。
步進電機的總極數越大,加工精度的要求就會越高。通常工業用混合型步進電機的步距角是1.8度,就是200極。
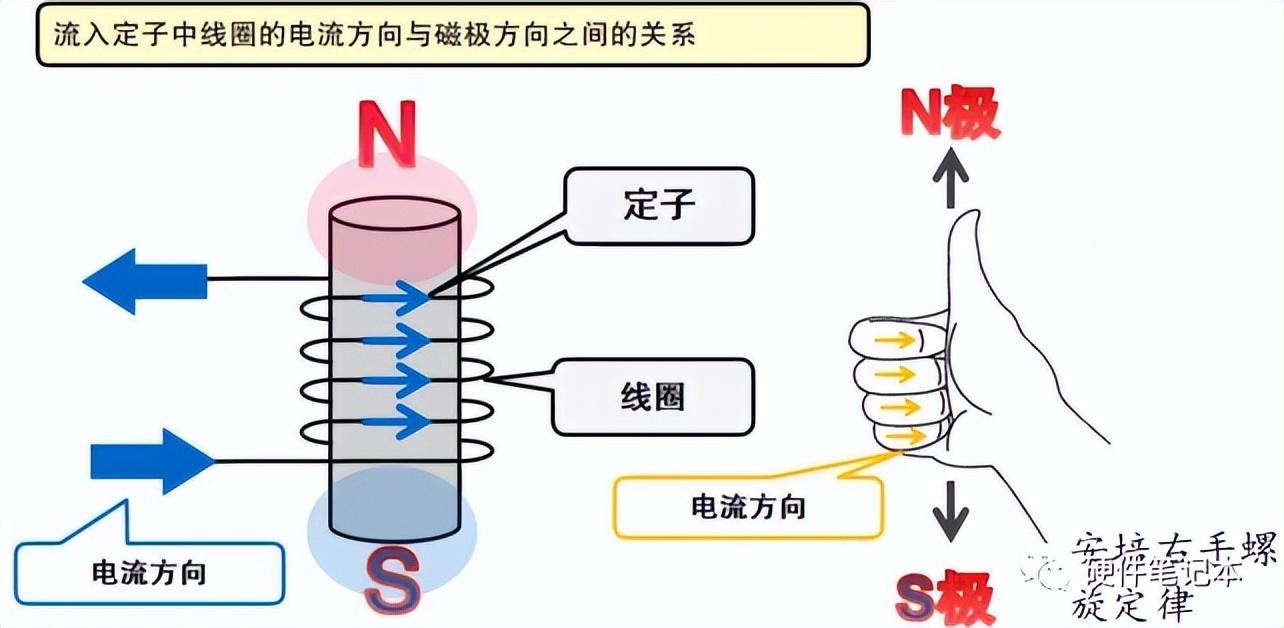
步進電機的相電流及磁場,遵循安培右手螺旋定律,由電能產生磁場能量,控制電機相電流,就能使電機定子的磁極方向發生反轉,二相磁場的變化相配合,進而產生電機的旋轉。
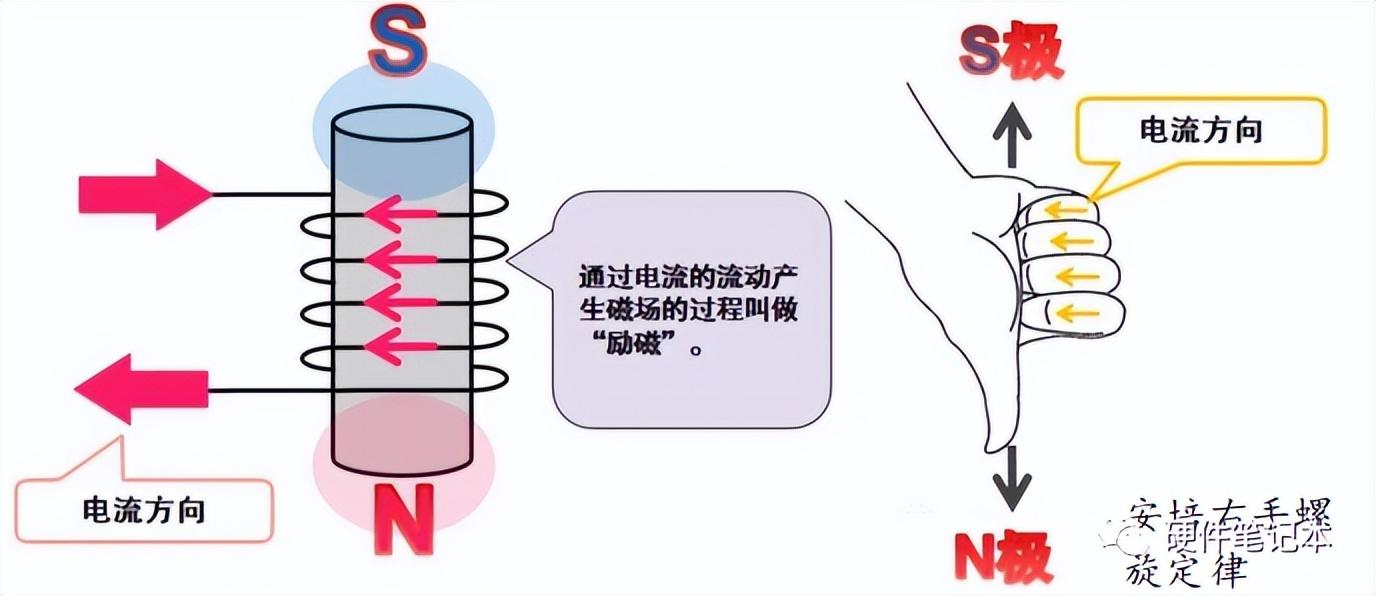
如果電流方向發生變化,磁極的方向也會發生變化,步進電機的電流流過定子產生磁場的過程叫做勵磁。
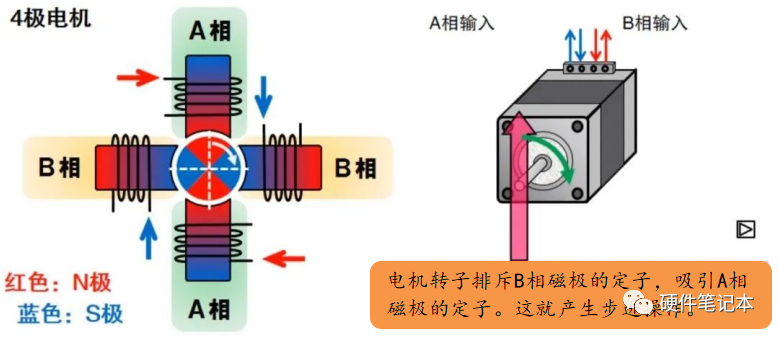
通常所說的二相步進電機,電機轉子的旋轉,包含不同磁極的磁場相斥和相吸實現的。如上圖所示,A相產生N極磁場吸引轉子的S極,B相產生S極磁場吸引轉子的N極,使定子產生旋轉的動力。如果改變A、B相定子線圈的電流方向,電機會產生另一步的旋轉。連續改變A、B相定子線圈的電流方向,電機會產生連續的旋轉。
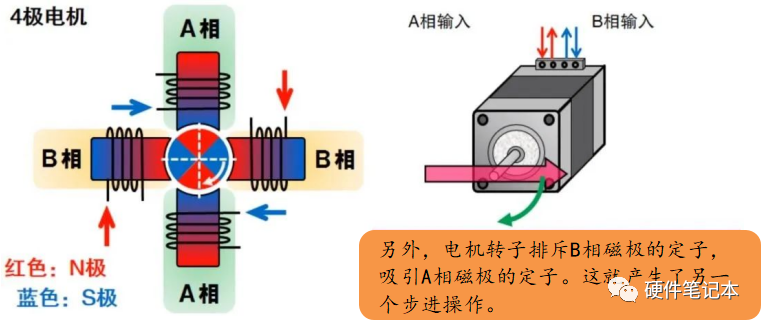
如上圖所示,電機的運動是通過改變電流在電機中的流動來實現的,電子轉子排斥B相磁極的定子,吸引A相磁極的定子,這就產生了另一個步進操作。
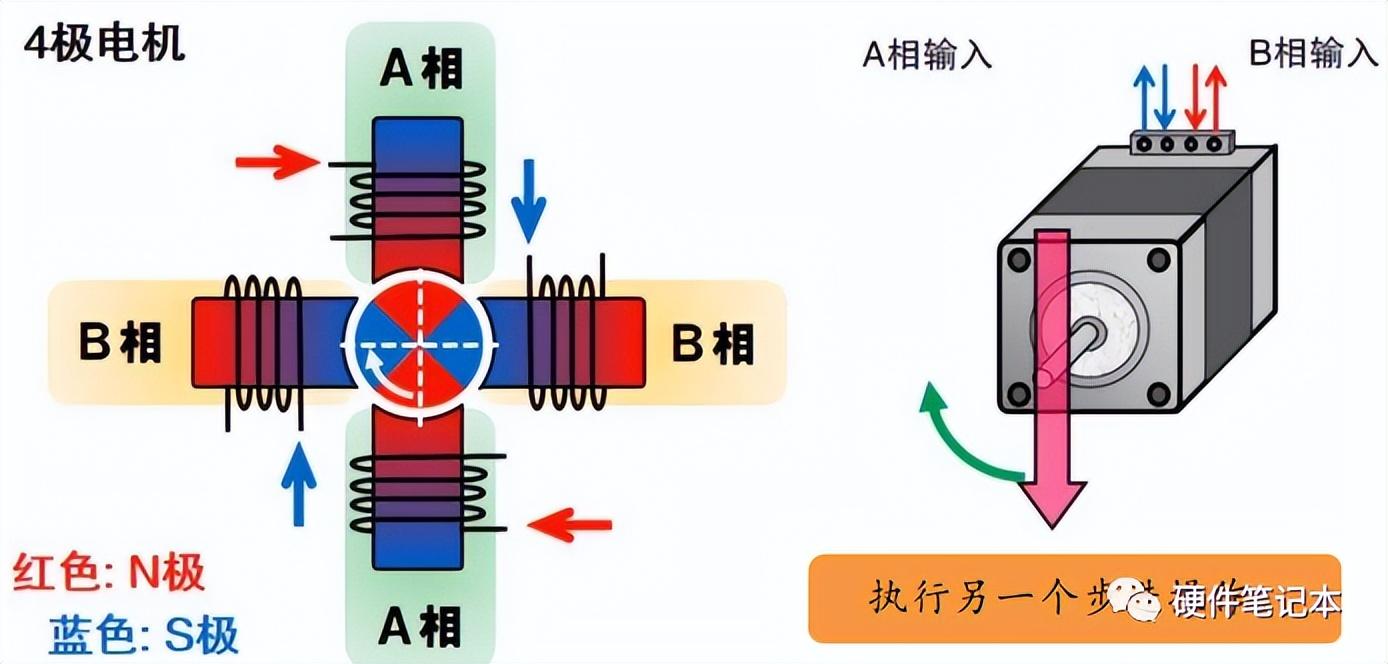
執行另一個步進操作,電機定子磁極反轉,轉子排斥B相磁極的定子,吸引A相磁極的定子,如上圖所示。
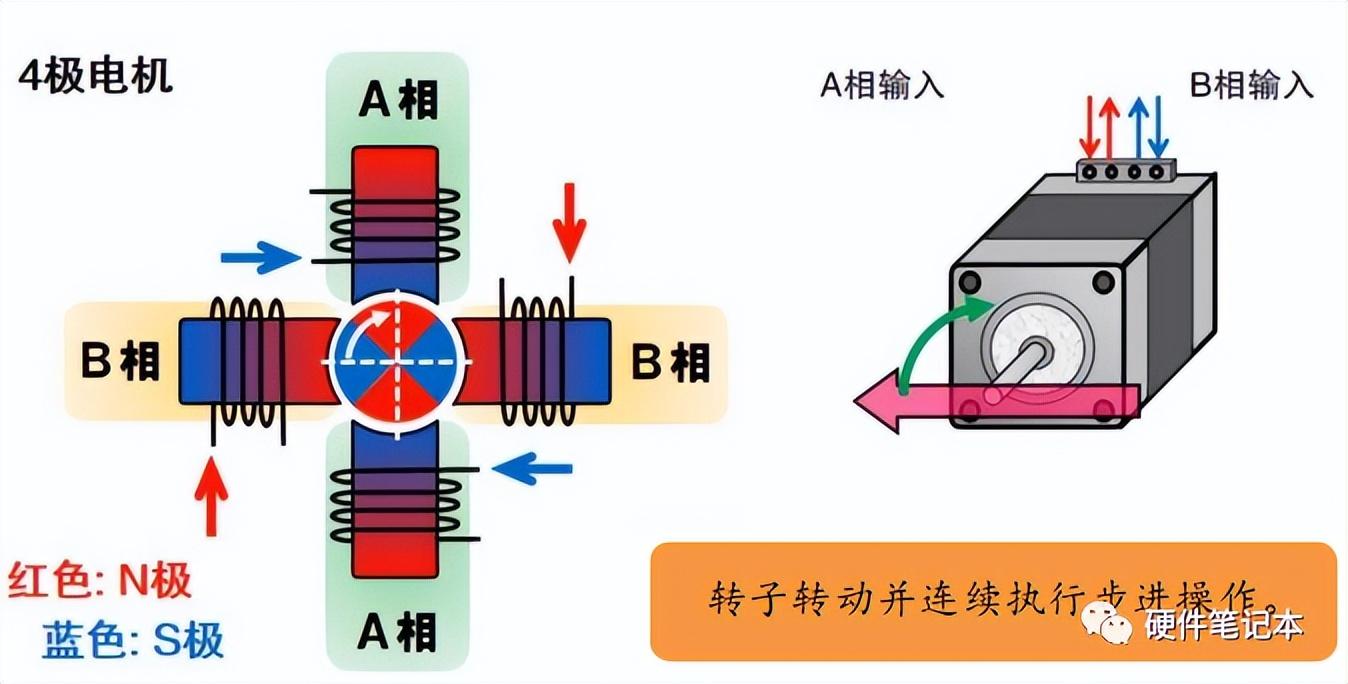
如上圖所示,定子線圈中的電流方向無論何時發生變化,磁極將會反轉,轉子重復步進操作。東芝步進電機驅動控制電路對電機的磁場勵磁的控制,是通過脈寬調制方式實現的,能夠實現電機高效、穩定的運行。
上一篇:使用Microchip Inductive Position Sensor實現高精度馬達控制
下一篇:最后一頁
推薦閱讀最新更新時間:2025-04-29 14:46

 單片機程序400例
單片機程序400例 步進電機原理與設計
步進電機原理與設計 射頻功放設計指南
射頻功放設計指南













 京公網安備 11010802033920號
京公網安備 11010802033920號