在如今這個智能時代,步進電機因其特有的開環位置控制性能而被廣泛應用。各設備在步進電機轉動的過程中,對它輸出力矩的平滑性有一定的要求。轉動的穩定性除了和步進電機的本體結構有關,也和步進電機的控制方式息息相關。 今天小編將為大家來介紹雙極性步進電機及其結構和控制模式。
雙極性步進電機的基本組件
步進電機屬于無刷直流(BLDC)電機,它按照等長的步進值逐步轉動。而雙極性步進電機則是每相都擁有一個繞組的步進電機,具體而言是兩相四線步進電機。它由定子和轉子兩個主要部件組成(見圖1)。

圖1: 雙極性步進電機的結構示意圖
定子
定子是電機的靜止部分。8個定子上分別繞有兩相雙極性繞組,每個定子鐵芯上帶有五齒(見圖1)。
A相繞組繞線從定子1開始繞,依次繞到定子3,5,7上(見圖2)。值得注意的是,定子1和5的繞線方向相同,而定子3和7的繞線方向相同。這兩組(定子1和5,以及定子3和7)的繞線方向相反。B相繞組也是以同樣的原理進行繞制,其中定子4和8為一組,定子2和6為一組。
圖2: 雙極性步進電機的繞組原理圖
轉子
通常轉子上貼有軸向充磁的永磁體。圖3所示為轉子的結構。

圖3: 轉子結構示意圖
圖4展示了轉子的側面截面圖。

圖4:轉子側面截面圖
永磁體的磁力線在電機本體內形成閉合。由于磁力線和磁阻效應,即使步進電機在不通電的情況下也有一定的鎖定力矩(見圖4)。
轉子上擁有50個齒,和定子齒輪相對起來,由于這樣的齒數和相數結構,它擁有1.8度的步進角度(見圖5)。步進角度:電氣周期完成90度,步進電機轉子前進的機械角度。

圖5: 1.8°步進角度結構示意圖
步進模式
為了方便講解后續的控制方式,我們將復雜的結構圖簡化為示意圖(見圖6)。
圖6:雙極性步進電機簡化示意圖
步進電機的定子和轉子可以被看作都只有一個齒,這使步進電機的驅動方式不同于其他電機。這種方法叫做雙全橋驅動,其中A相繞組接在第一個全橋驅動上, B相繞組接在第二個全橋驅動上(見圖7)。

圖7:雙全橋驅動電路圖
雙極性步進電機具有三種控制模式:單相步進、整步步進和半步步進(見表1)。
表1: 步進模式表

單相步進
當A相和B相按照單相步進的模式依次通電的時候,定子磁場會相應地發生變化,轉子也會由于極性吸引而轉動。表1中詳細描述了A相和B相(AB)的通電順序和轉子的轉動位置。
單相步進過程具體包括三個步驟,如下所述:
1.當A通電的時候,驅動電流由Q1流向Q4。此時定子A上端為N,下端在S,轉子轉到位置8(見圖6)。
2.接下來,B相通電,驅動電流由Q5流向Q8。此時定子B左端為S,右端為N,轉子轉到位置2(見圖6)。
3.接下來兩個狀態原理和上面類似,循環這一通電順序,轉子就開始轉動起來。
圖8顯示了單相步進AB相的電流波形。

圖8:單相步進AB相電流波形圖
整步步進
與單相步進不同的是,整步步進式AB繞組會同時進行通電。另外還有四個對應的通電方式和轉子電氣位置,只是其位置空間在電氣空間上不同于單相步進。根據整部的通電順序,轉子也能轉動起來。圖9顯示了AB相的整步電流波形。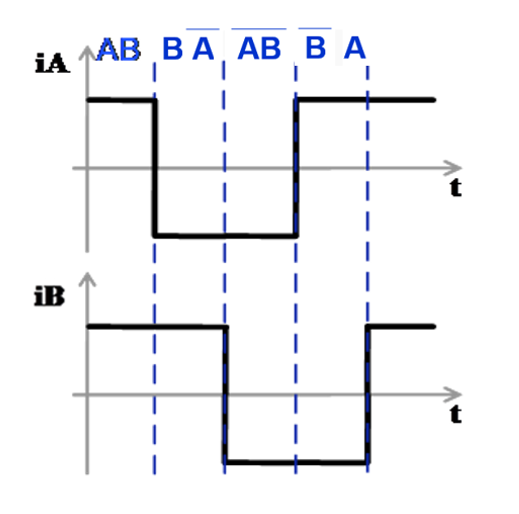
圖9:整步步進AB相電流波形圖
半步步進
半步模式將單相步進和整步步進這兩種控制方式進行融合,它的電氣角度位置更多,電流波形更加細致,轉動更加平滑。
圖10顯示了單相到兩相操作的非循環半步模式。這種模式在整步和半步之間交替生成8步序列。

圖10:非循環半步模式
結語
本文回顧了雙極性步進電機的基本組件(定子和轉子),以及三種主要的控制模式:單相步進、整步步進和半步步進。
上一篇:電機槽內線圈產生的電磁力是作用在槽內的導體上還是鐵芯上?
下一篇:運行中PLC故障常見原因及處理方法
推薦閱讀最新更新時間:2025-04-17 06:35

 TCPSS 1002-2018 低壓有源電力濾波裝置
TCPSS 1002-2018 低壓有源電力濾波裝置 stm32中的多路pwm例程
stm32中的多路pwm例程





- MIKROE-2564,基于 SK14DG13 開關 KeyLock 的 KeyLock CLICK 板帶有 3 個不同位置的加工密封鍵鎖機構
- 差分運放AD8138ARZ驗證板11
- T12-PD-ESP32S2
- LTC2174IUKG-14、14 位、105Msps 低功耗四通道 ADC 的典型應用
- LT1946EMS8 LT1946AEMS8E 演示板、12Vout 升壓轉換器、+5Vin、+12Vout/400mA 和三路輸出 TFT LCD 偏置電源
- 使用 Analog Devices 的 LTC3130EMSE 的參考設計
- ELRS 2.4G接收機e2812s+esp01f
- 霍爾電流表
- ADR445A 5 Vout 超低噪聲、LDO XFET 電壓基準的典型應用,帶電流吸收器和電流源
- 遠程開機卡






- 英特爾攜海信發布端側會議領域垂域模型解決方案,讓商務會議更安全更智能
- 英特爾攜手MAXHUB聯合發布企業級AI PC, 加速AI大模型在端側落地
- 助力低碳數字未來 英飛凌攜多款創新成果亮相2025慕尼黑上海電子展
- ?日清紡微電子科技賦能產業升級,亮相慕尼黑上海電子展
- 泰克閃耀 2025 慕尼黑上海電子展,引領測試技術新變革
- 破局AI眼鏡性能、續航、成本“不可能三角”:芯原推出高集成度參考設計方案
- 人形機器人成下一風口,各大車企紛紛入局,比智能汽車潛力更大?
- 業績最高 TDK為汽車應用推出電容值達100V的MLCC
- 微型柔性機器人:開啟智能救援與精準醫療新紀元
- 人工智能加速芯片設計:動態自適應流程引領高效創新







 京公網安備 11010802033920號
京公網安備 11010802033920號