國(guó)內(nèi)的自動(dòng)駕駛行業(yè)正處于快速發(fā)展階段。伴隨隨著芯片算力的提升、算法的優(yōu)化以及數(shù)據(jù)采集標(biāo)注傳感設(shè)備的日益成熟,自動(dòng)駕駛技術(shù)正逐步從實(shí)驗(yàn)室轉(zhuǎn)向商業(yè)化應(yīng)用。電車時(shí)代的來(lái)臨,加速了自動(dòng)駕駛時(shí)代的全面降臨,23年國(guó)內(nèi)汽車行業(yè)內(nèi)卷的開(kāi)始,自動(dòng)駕駛已然成為汽車賣點(diǎn)之一。
自動(dòng)駕駛訓(xùn)練模型的成熟和穩(wěn)定離不開(kāi)感知技術(shù)的成熟和穩(wěn)定,訓(xùn)練自動(dòng)駕駛感知模型需要使用大量準(zhǔn)確真實(shí)的數(shù)據(jù)。據(jù)英特爾計(jì)算,L3+級(jí)自動(dòng)駕駛每輛汽車每天產(chǎn)生的數(shù)據(jù)高達(dá)4000GB,作為自動(dòng)駕駛技術(shù)應(yīng)用落地的必要條件,數(shù)據(jù)采集、數(shù)據(jù)標(biāo)注服務(wù)已成為支撐自動(dòng)駕駛熱潮必不可少的一環(huán)。本文將以數(shù)據(jù)標(biāo)注的視角,通過(guò)標(biāo)貝科技自研平臺(tái)標(biāo)貝數(shù)據(jù)標(biāo)注平臺(tái),展示自動(dòng)駕駛常見(jiàn)的幾種標(biāo)注場(chǎng)景。
一、2D圖像類場(chǎng)景標(biāo)注展示
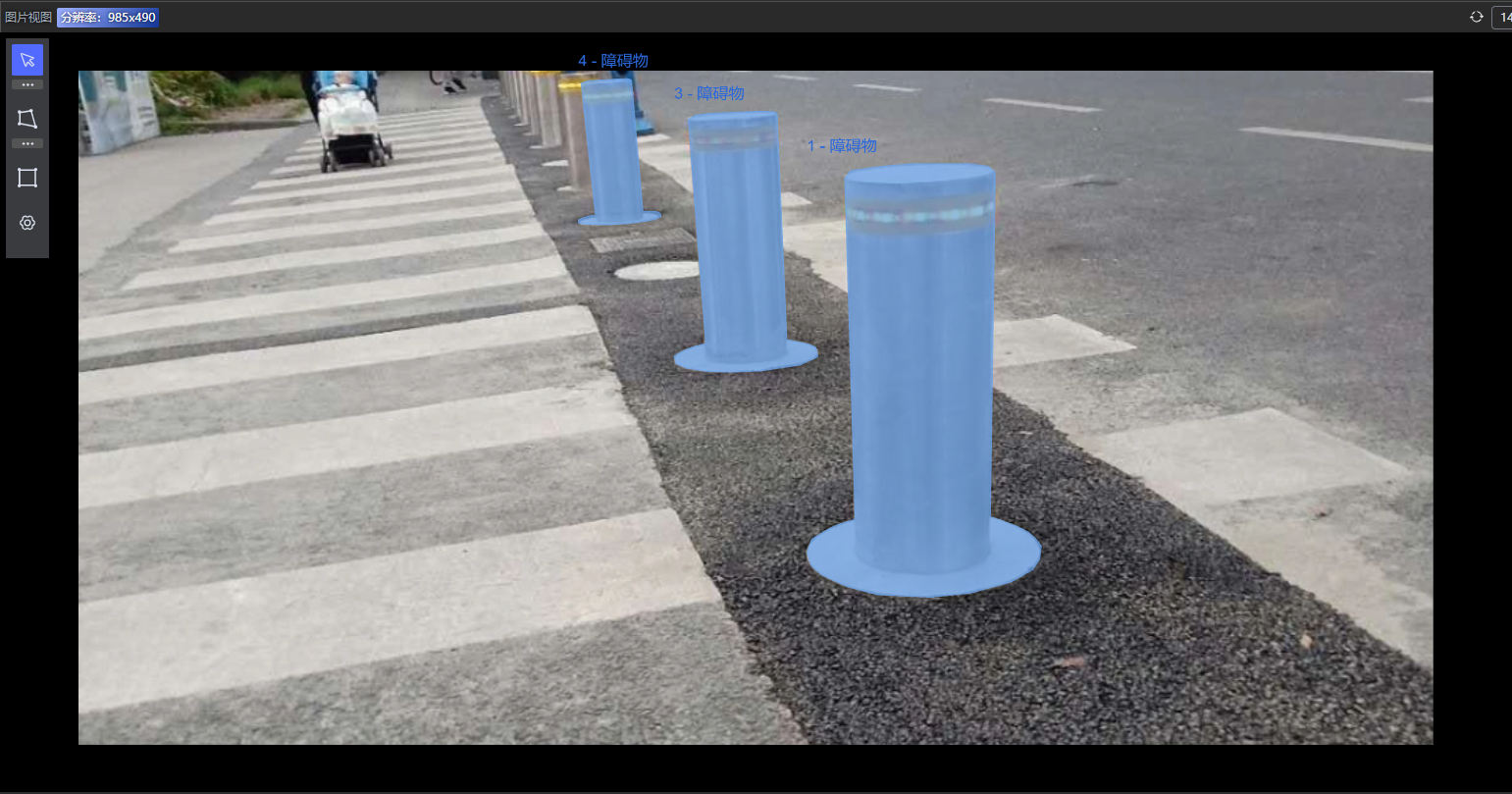
障礙物類標(biāo)注
圖像障礙物標(biāo)注通常是通過(guò)在圖像上繪制邊界框、多邊形或像素級(jí)別的標(biāo)記來(lái)完成的。旨在識(shí)別和標(biāo)注圖像中的障礙物。包括但不限于以下類型(行人、車輛、交通標(biāo)志和信號(hào)、道路和車道線、建筑和結(jié)構(gòu)、自然障礙物、路面條件、其他障礙物)
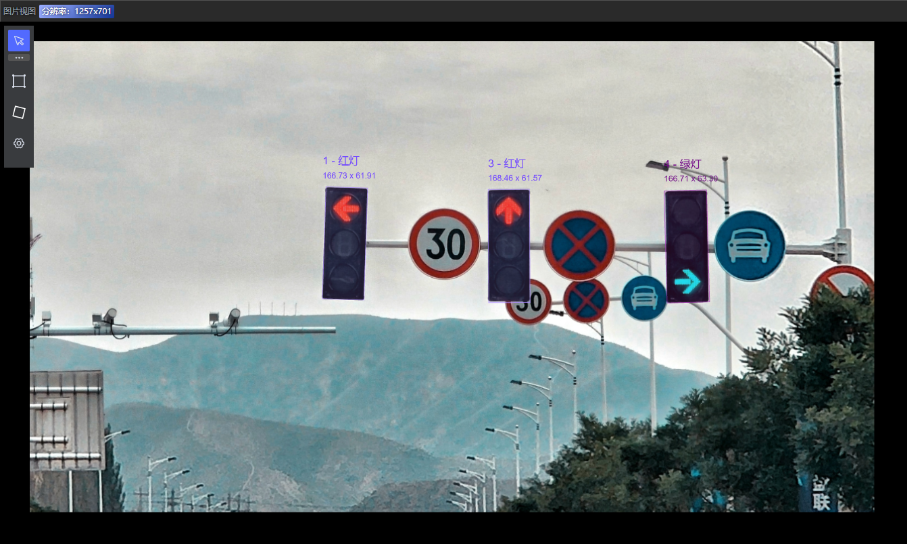
2.紅綠燈標(biāo)注
圖像紅綠燈標(biāo)注是指在圖像中識(shí)別和標(biāo)注紅綠燈的位置和狀態(tài),可以用于訓(xùn)練紅綠燈檢測(cè)和識(shí)別算法,以使自動(dòng)駕駛車輛能夠準(zhǔn)確地檢測(cè)和理解交通信號(hào),從而做出安全的駕駛決策。此外,這些數(shù)據(jù)還可以用于交通流量監(jiān)控、交通違章檢測(cè)等交通管理和安全應(yīng)用中。
3.人臉標(biāo)注
人臉標(biāo)注指對(duì)抓取圖像中的人臉的關(guān)鍵位置,如臉廓、眉毛、眼睛、嘴唇等進(jìn)行標(biāo)注。關(guān)鍵點(diǎn)標(biāo)注通常在自動(dòng)駕駛中用于車載系統(tǒng)監(jiān)控、統(tǒng)計(jì)乘客人員數(shù)據(jù)、司乘身份驗(yàn)證等。
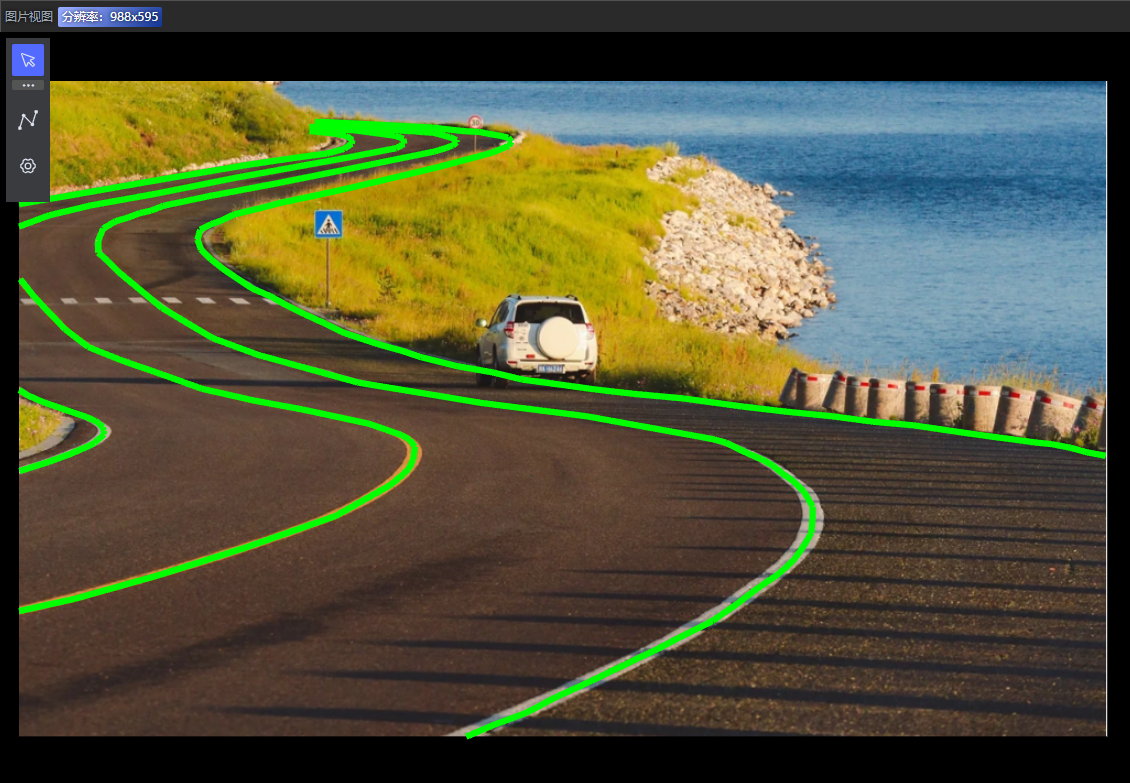
4.車道線標(biāo)注
車道線標(biāo)注主要用于道路地標(biāo)線的標(biāo)注,其數(shù)據(jù)可用于訓(xùn)練和評(píng)估車道線檢測(cè)、車道線跟蹤、車道保持等算法,以幫助自動(dòng)駕駛系統(tǒng)準(zhǔn)確識(shí)別和跟蹤車道線,實(shí)現(xiàn)車輛在道路上的穩(wěn)定行駛和導(dǎo)航。幫助自動(dòng)駕駛遵守車道規(guī)則行駛。
5.圖像分割
圖像分割可對(duì)圖片中復(fù)雜不規(guī)則類目進(jìn)行標(biāo)注,這些分類可能是“行人,車輛,建筑物,天空,植被等等,此外,除了區(qū)域劃分,語(yǔ)音分割還需標(biāo)注不同對(duì)象的對(duì)應(yīng)屬性,幫助車輛識(shí)別道路上的可行駛區(qū)域。
二、3D場(chǎng)景標(biāo)注展示
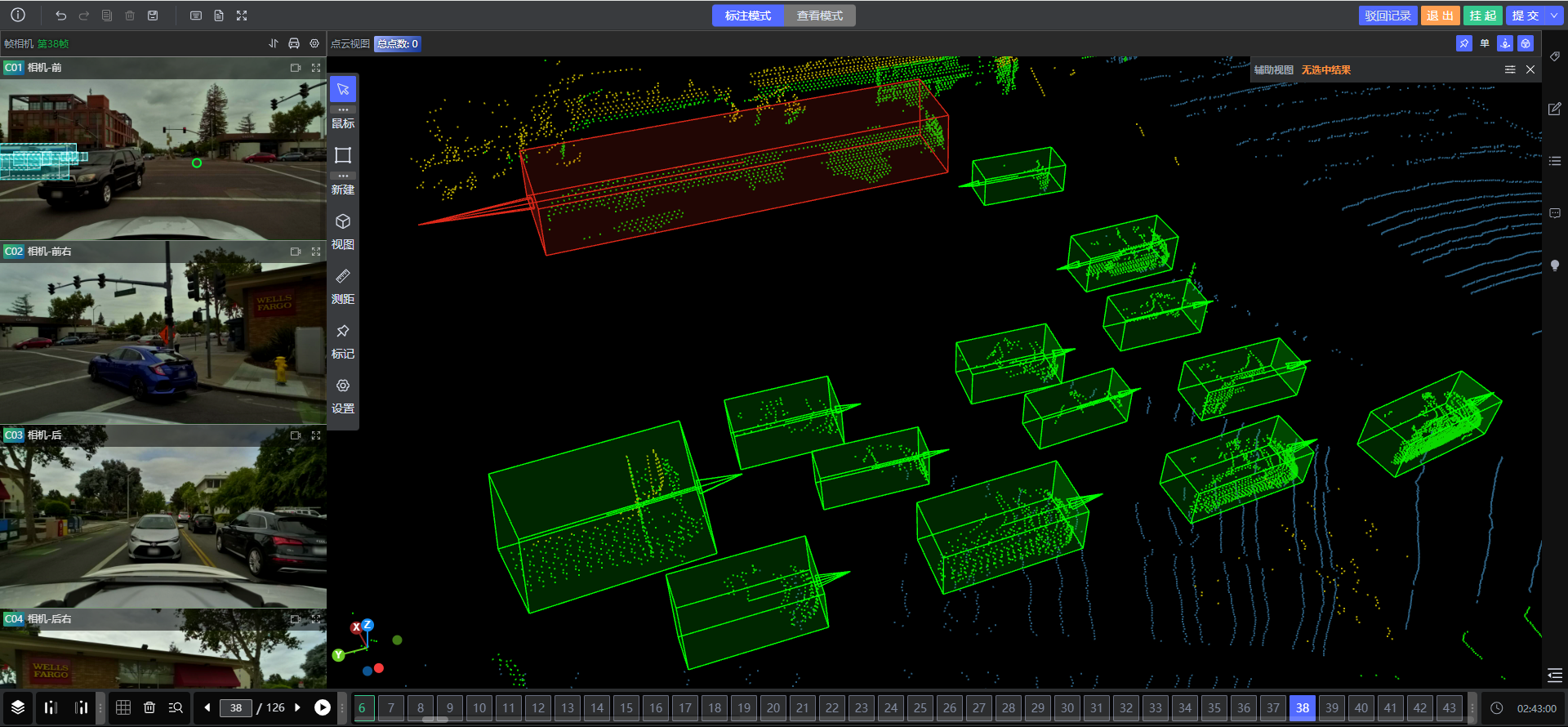
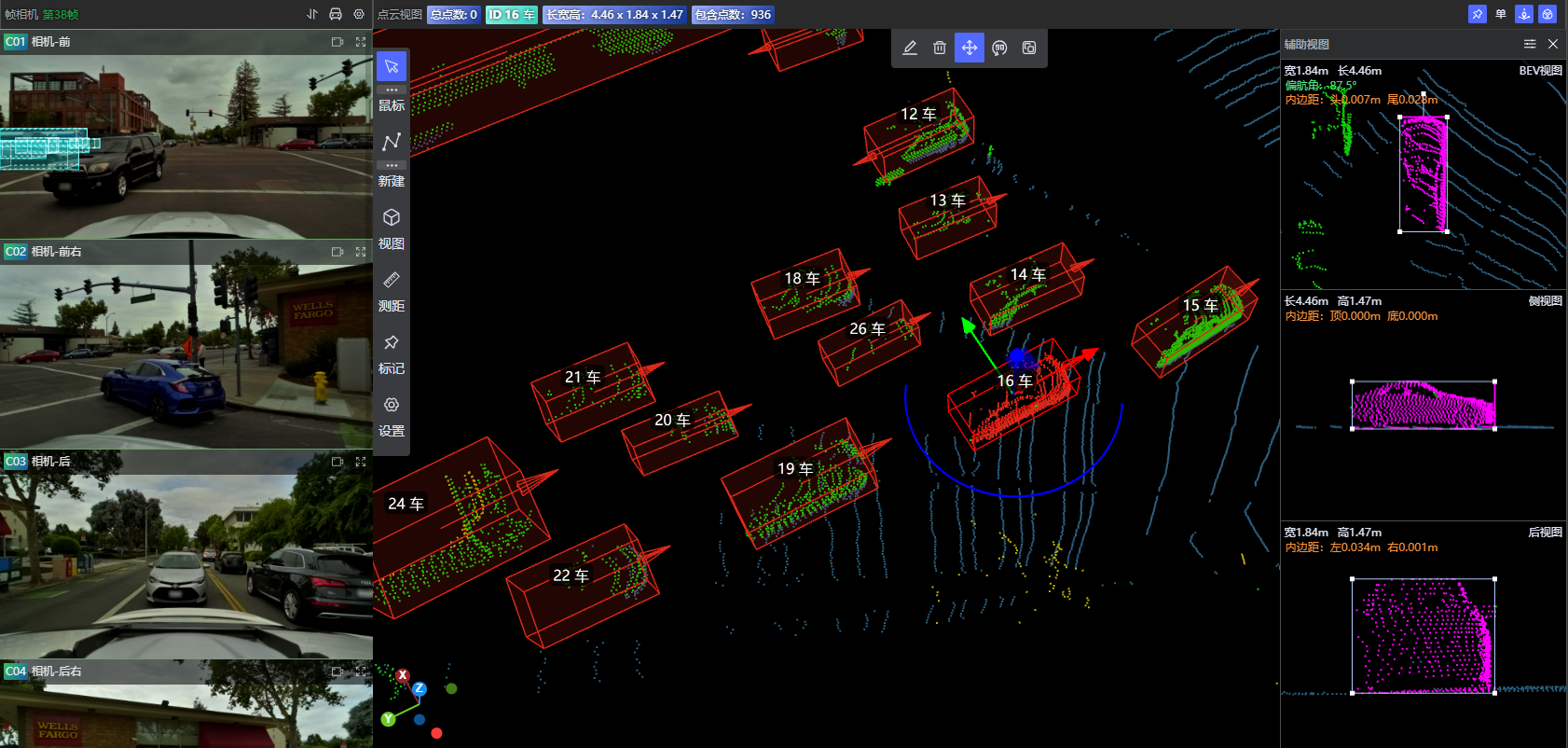
障礙物識(shí)別:
點(diǎn)云障礙物識(shí)別是指利用激光雷達(dá)或深度攝像頭等傳感器獲取的對(duì)目標(biāo)進(jìn)行外輪廓的3D拉框點(diǎn)云數(shù)據(jù),通過(guò)算法識(shí)別和分析其中的障礙物,用于自動(dòng)駕駛、機(jī)器人導(dǎo)航、三維環(huán)境建模等領(lǐng)域。點(diǎn)云不受外界環(huán)境、光照等因素干擾,它能夠幫助系統(tǒng)實(shí)時(shí)感知環(huán)境并做出相應(yīng)的決策,從而實(shí)現(xiàn)安全、高效的自主行駛或?qū)Ш健?/p>
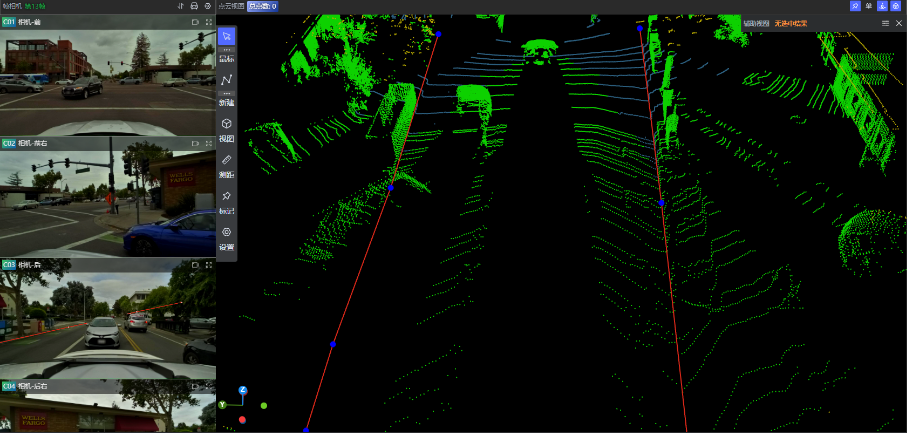
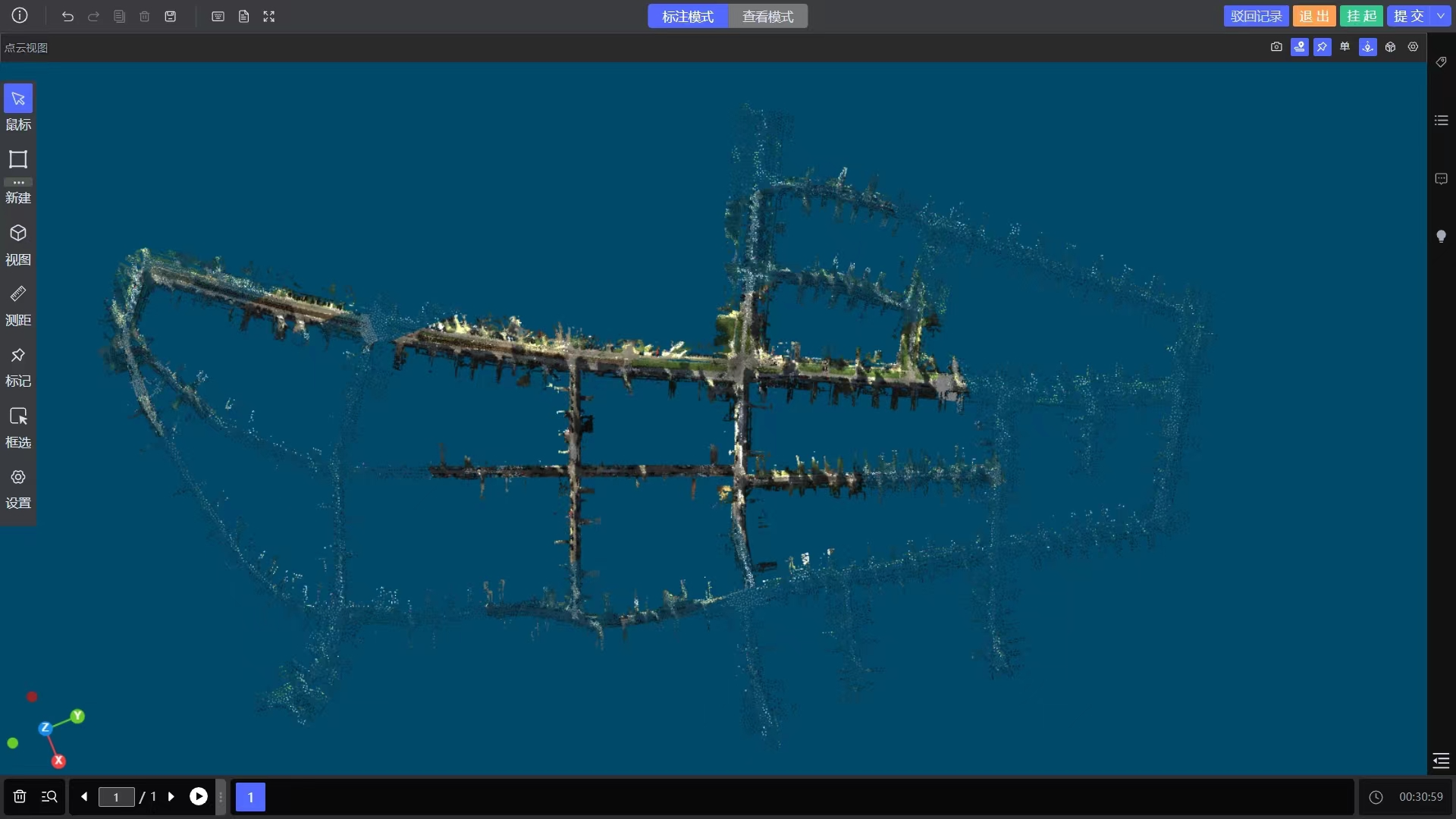
2.道路邊界檢測(cè)
點(diǎn)云道路邊界檢測(cè)是指從點(diǎn)云數(shù)據(jù)中識(shí)別和提取道路邊界線的過(guò)程。這在自動(dòng)駕駛、交通規(guī)劃、道路維護(hù)等領(lǐng)域中具有重要意義。點(diǎn)云道路邊界檢測(cè)的準(zhǔn)確性和魯棒性對(duì)于自動(dòng)駕駛等領(lǐng)域的安全性和性能至關(guān)重要,因此需要結(jié)合多種技術(shù)和方法來(lái)實(shí)現(xiàn)可靠的檢測(cè)結(jié)果。
3.物體識(shí)別及抓取
點(diǎn)云物體識(shí)別及抓取是指利用點(diǎn)云數(shù)據(jù)識(shí)別環(huán)境中的物體,并進(jìn)行抓取操作的過(guò)程。這在機(jī)器人操作、自動(dòng)化倉(cāng)儲(chǔ)、工業(yè)生產(chǎn)等領(lǐng)域具有重要應(yīng)用。點(diǎn)云物體識(shí)別及抓取涉及到多個(gè)領(lǐng)域的知識(shí)和技術(shù),包括點(diǎn)云處理、機(jī)器學(xué)習(xí)、運(yùn)動(dòng)控制、路徑規(guī)劃等。綜合利用這些技術(shù)和方法,可以實(shí)現(xiàn)高效、準(zhǔn)確的物體識(shí)別及抓取操作。
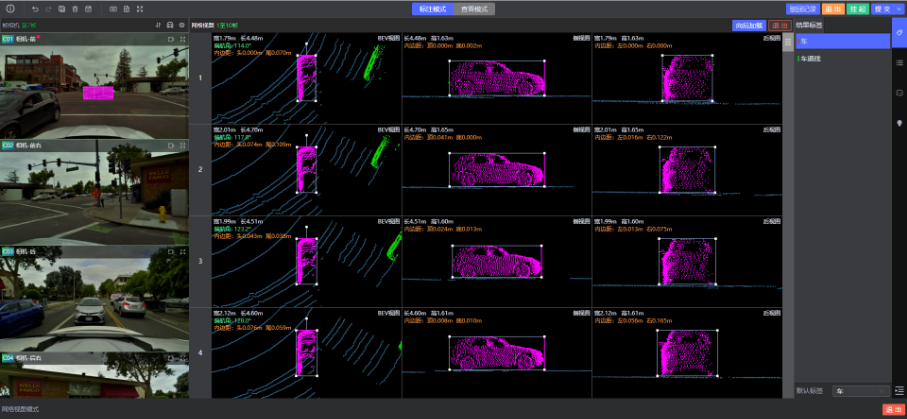
4.運(yùn)動(dòng)物體連續(xù)幀標(biāo)注
點(diǎn)云運(yùn)動(dòng)物體連續(xù)幀標(biāo)注的作用是提供對(duì)動(dòng)態(tài)環(huán)境中運(yùn)動(dòng)物體行為的詳細(xì)理解,從而支持各種應(yīng)用,包括智能交通、自動(dòng)駕駛、機(jī)器人技術(shù)、虛擬現(xiàn)實(shí)等領(lǐng)域的發(fā)展和應(yīng)用。
5.點(diǎn)云物體分割
點(diǎn)云物體分割是指在點(diǎn)云數(shù)據(jù)中將不同的物體或區(qū)域進(jìn)行劃分和標(biāo)記,以便進(jìn)一步分析、理解或處理。這在計(jì)算機(jī)視覺(jué)、機(jī)器學(xué)習(xí)和三維感知領(lǐng)域中是一個(gè)重要的任務(wù),特別是在自動(dòng)駕駛、機(jī)器人導(dǎo)航、虛擬現(xiàn)實(shí)等應(yīng)用中。
6.融合
使用激光雷達(dá)傳感器與攝像機(jī)捕捉車輛周圍物體3D點(diǎn)云數(shù)據(jù)和2D視覺(jué)數(shù)據(jù),將位置數(shù)據(jù)和視覺(jué)數(shù)據(jù)進(jìn)行融合標(biāo)注,使自動(dòng)駕駛汽車系統(tǒng)能夠更準(zhǔn)確的了解周圍環(huán)境。
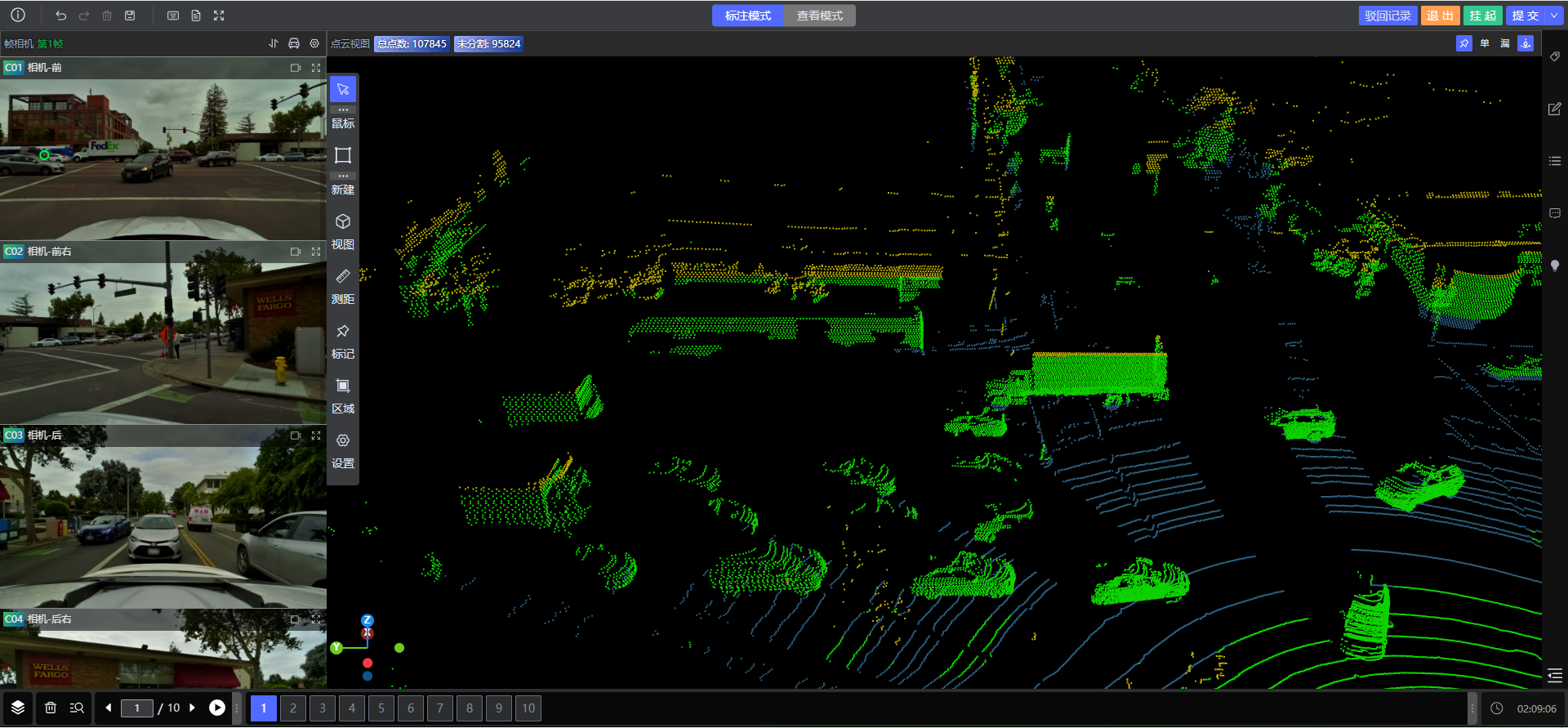
7.語(yǔ)義分割
與圖像分割相似,點(diǎn)云分割也需對(duì)不同區(qū)域標(biāo)注對(duì)象屬性,用分割工具將點(diǎn)云進(jìn)行上色分割,將道路目標(biāo)物體(多類型指定對(duì)象:包括但不限于車輛、建筑、樹(shù)木、行人等等)精準(zhǔn)標(biāo)注出來(lái)。
三、4D類數(shù)據(jù)標(biāo)注
4D點(diǎn)云標(biāo)注是在三維空間中標(biāo)注點(diǎn)云數(shù)據(jù)的同時(shí)考慮時(shí)間維度,通常用于動(dòng)態(tài)場(chǎng)景下的目標(biāo)跟蹤和行為分析。在自動(dòng)駕駛、機(jī)器人導(dǎo)航、視頻監(jiān)控等領(lǐng)域,對(duì)動(dòng)態(tài)場(chǎng)景中的障礙物、行人、車輛等進(jìn)行標(biāo)注時(shí),考慮時(shí)間維度可以提供更加準(zhǔn)確和完整的信息。
四、高效易用的標(biāo)貝數(shù)據(jù)標(biāo)注平臺(tái)
高質(zhì)量數(shù)據(jù)離不開(kāi)高效數(shù)據(jù)處理平臺(tái)。標(biāo)貝數(shù)據(jù)標(biāo)注平臺(tái)就是集以上優(yōu)點(diǎn)于一身的數(shù)據(jù)智能服務(wù)平臺(tái)。作為標(biāo)貝科技科技旗下自研的數(shù)據(jù)服務(wù)平臺(tái),標(biāo)貝數(shù)據(jù)標(biāo)注平臺(tái)在自動(dòng)駕駛領(lǐng)域建立了深厚的技術(shù)壁壘,在業(yè)內(nèi)維持了較高的技術(shù)領(lǐng)先性。
除涵蓋2D、3D、4D自動(dòng)駕駛?cè)珗?chǎng)景的標(biāo)注工具外,標(biāo)貝數(shù)據(jù)標(biāo)注平臺(tái)也包含項(xiàng)目、供應(yīng)鏈、數(shù)據(jù)安全等管理類目。通過(guò)整合數(shù)據(jù)集管理、團(tuán)隊(duì)人員管理、工作流管理、數(shù)據(jù)統(tǒng)計(jì)分析等工作環(huán)節(jié),打破數(shù)據(jù)孤島模式,實(shí)現(xiàn)對(duì)數(shù)據(jù)全生命周期的統(tǒng)一管理,有效節(jié)約管理成本并顯著提升業(yè)務(wù)執(zhí)行效率。
截至目前,標(biāo)貝科技已與眾多世界頂級(jí)廠商、一線科技公司、主流算法公司、造車新勢(shì)力、傳統(tǒng)汽車主機(jī)廠商等數(shù)十家自動(dòng)駕駛相關(guān)賽道企業(yè)達(dá)成深度合作。而在未來(lái),標(biāo)貝科技將繼續(xù)深耕自動(dòng)駕駛賽道,扮演好自動(dòng)駕駛基礎(chǔ)數(shù)據(jù)供應(yīng)商的角色,為自動(dòng)駕駛企業(yè)提供高質(zhì)量數(shù)據(jù)支撐,推動(dòng)自動(dòng)駕駛在更多場(chǎng)景下落地應(yīng)用。
上一篇:汽車軟件開(kāi)發(fā)中的ASPICE合規(guī)挑戰(zhàn)與Jama Connect解決方案
下一篇:MOS管在電動(dòng)汽車BMS中的應(yīng)用
推薦閱讀最新更新時(shí)間:2025-04-23 13:19

 智能網(wǎng)聯(lián)汽車產(chǎn)業(yè)鏈全景圖(可做求職參考)
智能網(wǎng)聯(lián)汽車產(chǎn)業(yè)鏈全景圖(可做求職參考) 操作系統(tǒng)真相還原
操作系統(tǒng)真相還原- 何為接近開(kāi)關(guān)?如何調(diào)試接近開(kāi)關(guān)
- 影響接近開(kāi)關(guān)工作距離的因素有哪些?使用接近開(kāi)關(guān)有哪些注意事項(xiàng)
- 如何安裝接近開(kāi)關(guān)?接近開(kāi)關(guān)如何正確接線?
- 高速數(shù)據(jù)傳輸:構(gòu)建嵌入式視覺(jué)的未來(lái)
- 接近開(kāi)關(guān)有哪些功能?如何判斷接近開(kāi)關(guān)是否已經(jīng)損壞
- 接近開(kāi)關(guān)有哪些分類?接近開(kāi)關(guān)損壞的原因有哪些
- 接近開(kāi)關(guān)的常開(kāi)與常閉是怎么回事?和光電開(kāi)關(guān)有什么區(qū)別?
- 實(shí)現(xiàn)工業(yè)設(shè)備輔助電源應(yīng)用要求的高耐壓與低損耗
- 接近開(kāi)關(guān)有哪些優(yōu)缺點(diǎn)?接近開(kāi)關(guān)使用經(jīng)驗(yàn)分享

- USB轉(zhuǎn)JTAG+UART下載器
- LT1172IN8、-28/1.25A 負(fù)升壓穩(wěn)壓器的典型應(yīng)用
- LTC1261LCMS8-4.5 5V 輸入、-4V 輸出 GaAs FET 偏置發(fā)生器的典型應(yīng)用電路
- OP484FSZ-REEL 單電源、3V 低噪聲儀表放大器的典型應(yīng)用
- ADL5324-EVALZ,基于 ADL5324 400 至 4000 MHz 射頻驅(qū)動(dòng)放大器的評(píng)估板
- L6482H大功率微步步進(jìn)電機(jī)驅(qū)動(dòng)器
- LTC3633AEFE-2 6A 1MHz 2 相降壓穩(wěn)壓器的典型應(yīng)用電路
- LTC3630MPMSE 4V 至 65V 輸入至 3.3V 輸出、500mA 降壓轉(zhuǎn)換器的典型應(yīng)用電路
- LT8330IS6 4V 至 36V 輸入、-12V 反相轉(zhuǎn)換器的典型應(yīng)用電路
- 4455C-434-PDK,用于 Si4455 434-MHz 射頻收發(fā)器的 EZRadio 雙向鏈路開(kāi)發(fā)套件






- 強(qiáng)強(qiáng)聯(lián)合再進(jìn)階!理想AD Pro輔助駕駛正式升級(jí)搭載地平線征程6M
- 英特爾與黑芝麻智能簽署合作備忘錄,聯(lián)合發(fā)布艙駕融合平臺(tái)
- 英特爾與面壁智能宣布建立戰(zhàn)略合作伙伴關(guān)系,共同研發(fā)端側(cè)原生智能座艙
- 芯馳科技發(fā)布X10,打造全民AI時(shí)代座艙處理器新標(biāo)桿
- 精準(zhǔn)適配,輕裝全能!芯馳發(fā)布E3系列高端智控MCU三大應(yīng)用場(chǎng)景
- 場(chǎng)景定義、精準(zhǔn)創(chuàng)「芯」,芯馳全新發(fā)布AI座艙處理器和高端智控系列
- Arm 技術(shù)加持,地平線以 HSD 及征程 6P 推動(dòng)汽車智能化變革
- 華為自動(dòng)駕駛技術(shù)解讀
- 加速電動(dòng)化轉(zhuǎn)型,邦迪汽車系統(tǒng)攜多款創(chuàng)新產(chǎn)品首秀2025上海車展
- 數(shù)據(jù)中心面臨電力約束挑戰(zhàn),推動(dòng)GenAI終端發(fā)展
- 有獎(jiǎng)直播:安世半導(dǎo)體先進(jìn) SiC MOSFET 助力提升 EV-Charger 和 OBC 應(yīng)用能效
- ADI有獎(jiǎng)下載活動(dòng)之21:ADI民用雷達(dá)解決方案
- 看是德科技利用校準(zhǔn)降低儀器測(cè)量不確定度、提高測(cè)試精度 直播享好禮!
- 【新年活動(dòng)】2023,兔 do list!
- 有獎(jiǎng)直播:助力AI算力,下一代GPU服務(wù)器中卡緣高速互連解決方案哪里找?
- 有獎(jiǎng)直播|5G多場(chǎng)景終端應(yīng)用對(duì)連接器的新要求及Molex的5G連接方案
- 2018,EEWORLD邀請(qǐng)你定下新年成長(zhǎng)計(jì)劃
- 【EE團(tuán)拍賣】\\
- 下載有禮|是德科技電子書 《通過(guò)了解測(cè)試精度的基礎(chǔ)知識(shí), 提高良率并降低風(fēng)險(xiǎn)》,不做“差不多先生”
- CadenceLIVE China 2022中國(guó)線上用戶大會(huì) 報(bào)名中!
- STM32的ADC的原理與使用
- STM32家族介紹、區(qū)別及命名規(guī)則
- MDK5(keil5)環(huán)境安裝及破解(附MDK5安裝包、注冊(cè)機(jī)及F4支持包)
- STM32怎么創(chuàng)建工程:如何創(chuàng)建第一個(gè)工程模板(基于固件庫(kù))
- STM32怎么創(chuàng)建工程:最簡(jiǎn)單、方便的創(chuàng)建工程方法
- 基于單片機(jī)與WTC6216相結(jié)合帶背光的人體觸摸式按鍵電路設(shè)計(jì)
- 基于MSP430單片機(jī)為控制核心的IC卡智能水表控制器的設(shè)計(jì)方案
- 采用MSP430單片機(jī)與DTMF技術(shù)設(shè)計(jì)醫(yī)院呼叫對(duì)講系統(tǒng)設(shè)計(jì)
- 基于單片機(jī)的多功能數(shù)字鐘系統(tǒng)設(shè)計(jì)分析
- 一種新型電流隔離檢測(cè)電路的設(shè)計(jì)







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)