1.背景介紹
機械臂的位置控制是機械臂最重要的功能。機械臂的位置控制精度也是研究者及工程師一直關注的問題。本文梳理下機械臂位置控制的一些發展脈絡,幫助大家提高對其的認識以及如何去提升機械臂的位置控制性能。

精度衡量:直接測量機械臂末端的位置比較困難,這里采用一種近似的方式,比較機械臂各軸指令角度與實際編碼器反饋角度間的偏差值。
2.控制策略
三環反饋伺服控制 這種位置控制方式是大家最為熟悉的。 此時控制都是在驅動器里完成的,它根據指令位置去生成力矩,讓機械臂很好地追上指令位置,而控制器只是一個軌跡規劃器,負責發送給驅動器指令位置。

這種方式在穩態時的精度很高,且抗干擾能力強,這可以保證機器人的重復定位精度。 然而動態性能較差,比如指令位置曲線與實際位置曲線間的時間延遲較大。
前饋+三環控制 這種策略是在三環反饋控制的基礎上,加入前饋指令值。 驅動器一般需工作在CSP模式,前饋值的生成方式有兩種:控制器還是只發送給機械臂指令位置,驅動器通過差分生成前饋速度值及前饋加速度值; 控制器不止發送指令位置,它還將前饋速度偏置值、前饋力矩偏置值也發送給驅動器。

這種方式可以提供機械臂的動態響應能力,下圖是無前饋及有前饋下的位置誤差曲線。

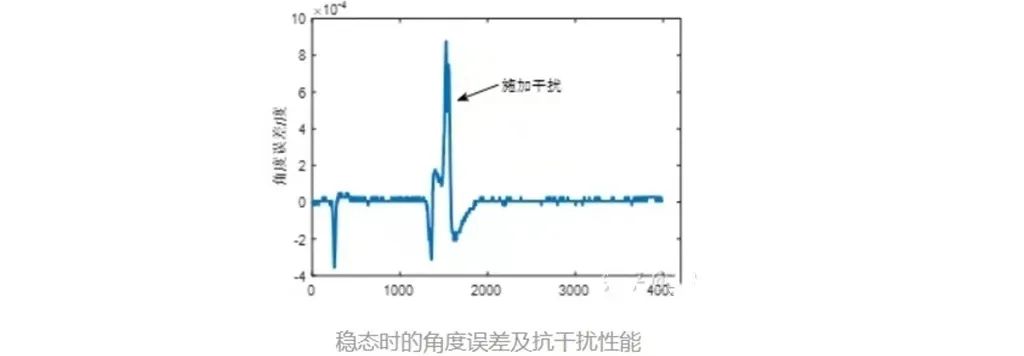
非線性控制 前兩種方式的驅動器都是工作在位置控制下,而第三種策略將驅動器置于電流/力矩模式下,采用現代控制理論中的一些非線性控制策略。 控制器直接根據指令位置計算出力矩值,發送給驅動器。此時驅動器弱化為一個功率放大模塊,而控制器才能算是在做運動控制。 這其中可采用的控制策略有計算力矩法、反饋線性化及一些自適應控制策略等。 下圖的采用反饋線性化方法的控制效果,可以達到跟上一種方法差不多的動態效果,但實驗中發現,它的穩態精度及抗干擾能力不如上一種。

下圖是關于ABB控制器原理的一些資料,從中可以看到他們可能已經采用了現代控制理論及非線性控制的部分東西。

高級控制 前面的控制中都是將機械臂看做是完全剛性的,然而實際的材料都是有柔性的。 機械臂的柔性可歸結為連桿的柔性及關節的柔性,這其中機械臂70~80%的柔性是由關節減速器及傳動元件等引起的。 在上圖ABB的控制器框圖中,也區分了tool position與motor position。這種控制策略中普遍需要電機端位置反饋及連桿端位置反饋。

該類機械臂控制中會對關節柔性部分進行建模及辨識。 此外,機械臂中一般只有電機端安裝有編碼器,這種控制在實際使用中還涉及到如何有效且方便地估計連桿的位置。 在后續的文章中,我們會討論關于關節剛度辨識及連桿位置估計等問題。
3.總結
機器人控制器能發揮出最大性能,需要機器人結構、裝配、系統辨識、狀態估計、控制周期、控制方法等多方面來共同保證的。 機器人非線性控制策略是學術上的研究熱點,然而國內工程師普遍對這些不太感冒,覺得前兩種控制策略足夠好了。 將非線性控制策略與三環控制策略結合在一起,并考慮關節柔性,可充分發揮理論的能力,或許可以在實踐中獲取更好的效果。
上一篇:快速控制原型RCP與硬件在環仿真HIL該如何區分呢?
下一篇:PLC的輸入輸出接口是否需要進行隔離保護?
- 熱門資源推薦
- 熱門放大器推薦
 CAN總線輕松入門與實踐
CAN總線輕松入門與實踐 LM7171AIWMX
LM7171AIWMX



















 京公網安備 11010802033920號
京公網安備 11010802033920號