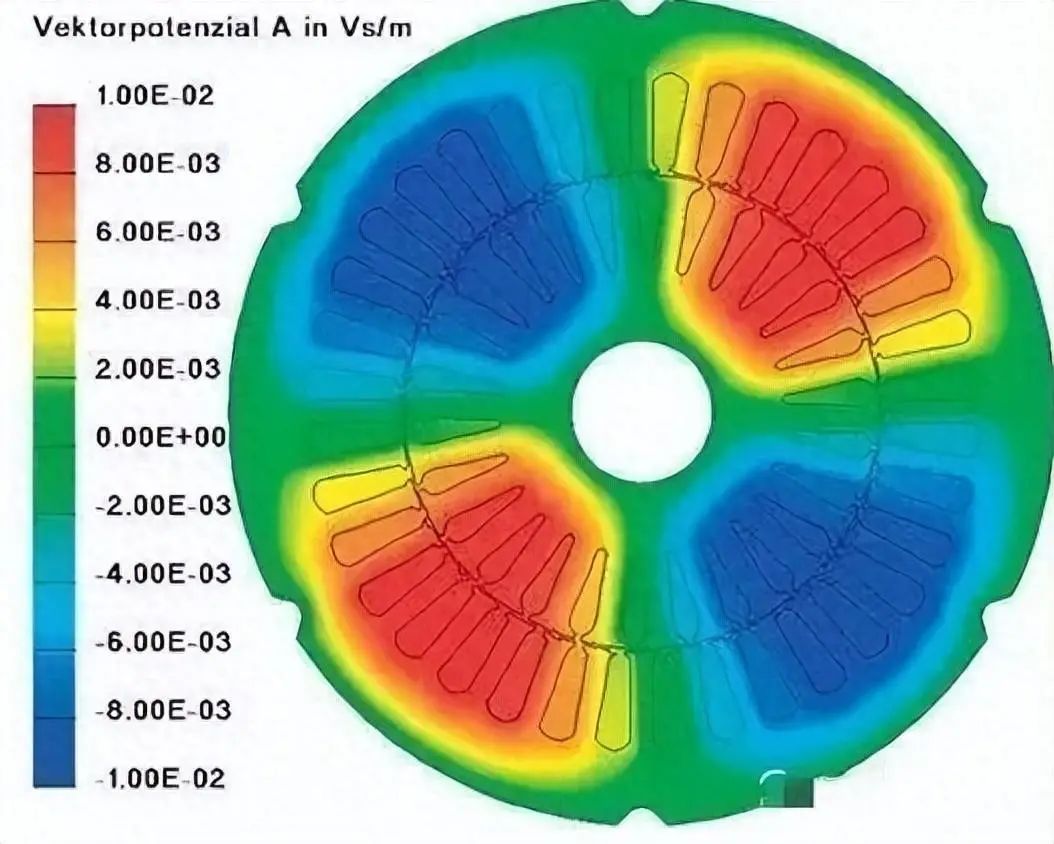
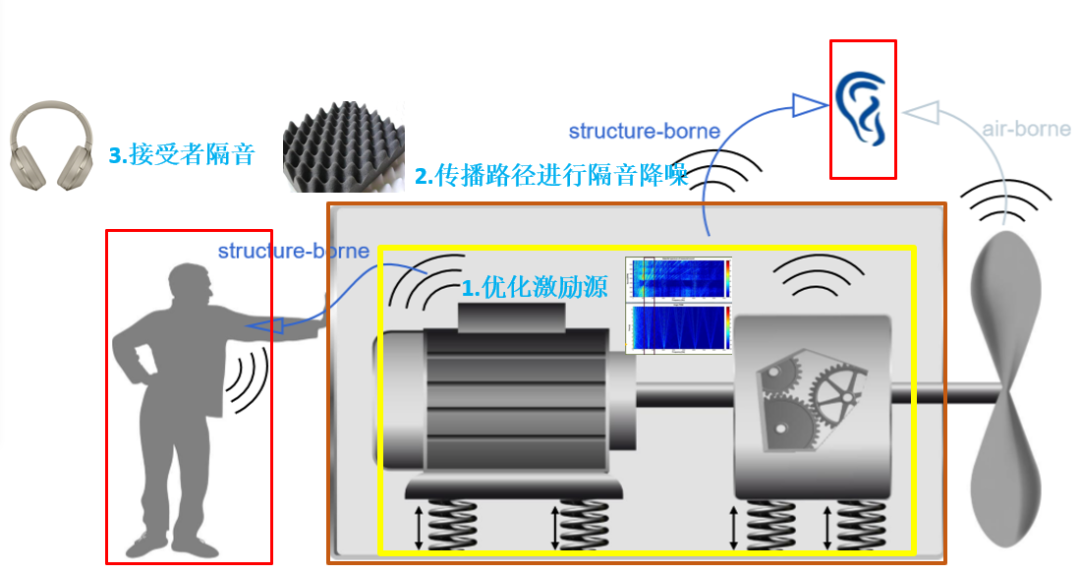
永磁同步電機的振動主要來自三個方面:空氣動力噪聲、機械振動和電磁振動。空氣動力噪聲是由于電機內氣壓急劇變化和氣體與電機結構摩擦引起的。機械振動是由軸承周期性彈性形變、幾何形態缺陷和轉子軸不平衡引發的。電磁振動是由電磁激勵引發,氣隙磁場作用于定子鐵心,引發定子的徑向形變,傳遞至電機殼體并輻射噪聲。氣隙磁場的切向分量雖小,但會引起齒槽轉矩脈動和電機的振動。在推進用永磁同步電機中,電磁激勵是主要振動源。
在永磁同步電機的初期設計階段,通過建立振動響應模型,分析電磁激勵的性質和結構的動態特性,預測和評估振動噪聲水平,以及針對振動進行優化設計,可以減少振動噪聲,提高電機性能并縮短研制周期。
目前的研究進展可以總結為三個方面:
1電磁激勵的研究:電磁激勵是振動的根本原因,研究已經開始多年。早期的研究包括電機內電磁力的分布計算和徑向力的解析式推導。近年來,有限元仿真方法和數值分析得到廣泛應用,國內外學者研究了不同極槽配置對永磁同步電機齒槽轉矩的影響等。
2結構模態特性的研究:結構的模態特性與振動響應密切相關,尤其是當激勵頻率接近結構的固有頻率時,會發生共振。國內外學者通過實驗和仿真研究了電機定子系統的結構特性,包括影響模態頻率的因素如材料、彈性模量和結構參數等。
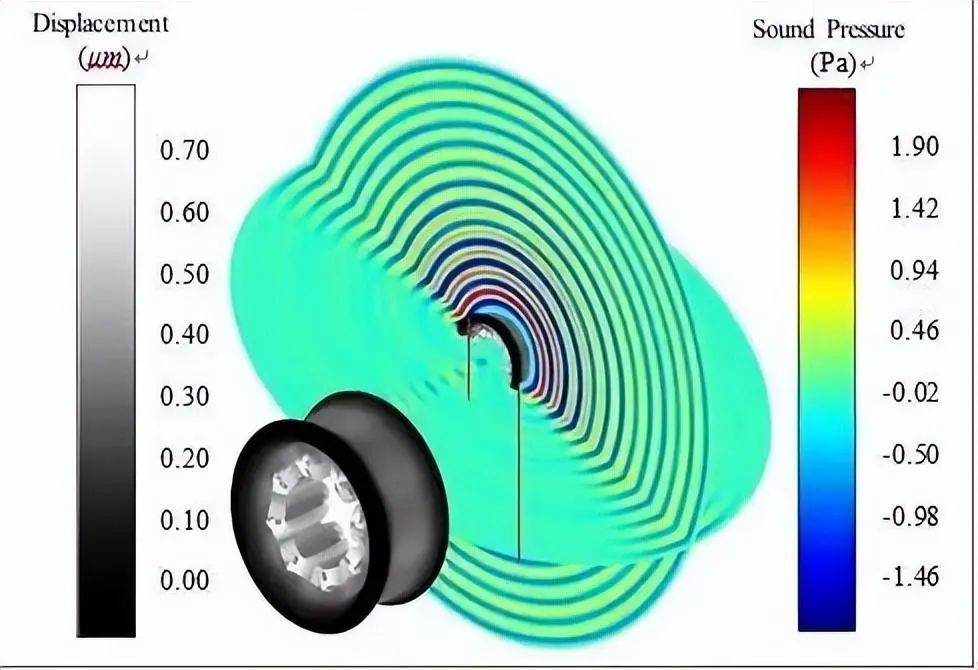
3電磁激勵下振動響應的研究:電機振動響應是電磁激勵作用在定子齒上引起的,研究者通過分析電磁力的時空分布,將電磁激勵加載至電機定子結構,得到了振動響應的數值計算和實驗結果。研究者還研究了殼體材料的阻尼系數對振動響應的影響。
上一篇:處理安全電壓控制電機啟停電路的常見故障
下一篇:極海APM32F407可編程邏輯控制器PLC應用概述
推薦閱讀最新更新時間:2025-04-23 18:09
永磁同步電機恒壓頻比開環控制系統Matlab/Simulink仿真分析(二)

前言 本章節是對上一章節的補充,上一章節恒壓頻比開環控制系統采用SPWM控制方式實現,本章節采用SVPWM控制方式實現,也為后續章節的分析奠定一個基礎。 一、SVPWM 有關SVPWM控制方式在本章節不展開分析,后續會專門寫一章節進行分析。交流電機需要輸入三相正弦電流的最終目的就是在電機空間形成圓形磁場,從而產生恒定的電磁轉矩。把逆變器和交流電機視為一個整體,以圓形旋轉磁場為目標來控制逆變器的工作,這種控制方法稱為“磁鏈跟蹤控制”,磁鏈軌跡的控制是通過交替使用不同的電壓空間矢量實現的,所以又稱為“電壓空間矢量PWM控制”,即SVPWM。 與SPWM控制相比,SVPWM有更高的電壓利用率,其輸出電壓最高可提高15%左右。 二
[嵌入式]
永磁同步電機結構
永磁同步電機的優點 工作原理 永磁同步電機是以永磁體替代勵磁繞組進行勵磁。當永磁電機的三相定子繞組(各相差120°電角度)通入頻率為f的三相交流電后,將產生一個以同步轉速推移的旋轉磁場。穩態情況下,主極磁場隨著旋轉磁場同步轉動,因此轉子轉速亦是同步轉速,定子旋轉磁場恒與永磁體建立的主極磁場保持相對靜止,它們之間相互作用并產生電磁轉矩,驅動電機旋轉并進行能量轉換。 永磁同步電機的優點 永磁同步電動機和直流電機相比,它沒有直流電機的換向器和電刷等缺點。和異步電動機相比,它由于不需要無功勵磁電流,因而效率高,功率因數高,力矩慣量比大,定子電流和定子電阻損耗減小,且轉子參數可測、控制性能好;和普通同步電動機相比,它
[嵌入式]
高性能交流永磁同步電機伺服系統現狀
1概述
在中小容量高精度傳動領域,廣泛采用永磁式同步電機,可用在轉子上加永磁體的方法來產生磁場。由于永磁材料的固有特性,它經過預先磁化(充磁)以后,不再需要外加能量就能在其周圍空間建立磁場。這既可簡化電機結構,又可節約能量。
由于永磁同步電機閉環控制當中需要電機轉子位置,因此需要在電機軸上安裝機械位置傳感器。由于機械傳感器的存在,增加了系統復雜程度和成本,降低了系統魯棒性。永磁同步電機的無速度傳感器控制成為現今研究的一個熱點問題。
2永磁式同步電機的特點及其分類
永磁式同步電動機結構簡單、體積小、重量輕、損耗小、效率高,和直流電機相比,它沒有直流電機的換向器和電刷等缺點。和異步電動機相比,它由于不需要無功勵磁電流,
[嵌入式]
改進永磁同步電機轉矩控制精度的措施
自20世紀60年代末以來,面向磁場的矢量控制一直是交流電機控制的主流。這樣的控制方法的主要特點是對電機氣隙磁場和轉矩進行分開控制。對于永磁同步電機,典型的控制設計就是考慮恒定的磁通會產生一個轉矩常數kt,該常數在大多數電機的技術手冊中都能找到。獲得需要的轉矩m所對應的電流iq也由此計算得到。但是,輸出轉矩和相應的電流iq之間的這種恒定關系的可信度很容易受到各種各樣的實際因素的負面影響,這樣的影響很容易產生轉矩控制中所不能接受的精度偏差。一些容易影響的實際因素如下: ●產品出廠過程與材料的老化; ●鐵心材料在過載時飽和; ●磁阻轉矩變化; ●電樞(磁性材料)的溫度。 磁材料(磁介質)的分散性導致的實際轉矩常數與數據手冊上的數值偏差可
[嵌入式]
基于DSP的無位置傳感器永磁同步電機磁場定向控制系統
本文著重介紹了一種改進算法,即取消相電流傳感器且采用滑模觀測器實現無位置傳感器速度控制。 永磁同步電機(PMSM)是近年來發展較快的一種電機,由于其轉子采用永磁鋼,屬于無刷電機的一種,具有一般無刷電機結構簡單,體積小,壽命長等優點[1]。 本文討論空間矢量控制的永磁同步電機,采用磁場定向算法借助DSP高速度實現對轉速的實時控制。由于控制算法必須獲取轉子位置信息,所以傳統的控制系統都需要以光電編碼器等作為轉子位置傳感器。為了最大限度減少傳感器,本文從改變相電流檢測方法,建立采用砰-砰控制的滑模觀測器,介紹一個可以實現的模型。 2 磁場定向原理 磁場定向控制,簡稱FOC。如圖1所示,兩直角坐標系:αβ坐標系為定子靜止坐標系,α軸
[工業控制]
MEMS傳感器振動檢測技術:現狀、挑戰與解決方案
微機電系統(MEMS)傳感器憑借微型化、低功耗、高集成度等優勢,已成為振動檢測領域的關鍵技術。在工業設備狀態監測、汽車電子、消費電子等場景中,MEMS振動傳感器通過實時采集振動信號,為故障預測、性能優化提供數據支撐。然而,隨著應用場景的復雜化,MEMS傳感器在高頻響應、環境適應性、多物理場耦合等方面面臨技術瓶頸。本文將結合行業現狀,分析MEMS振動檢測技術的核心挑戰,并提出針對性解決方案。 一、MEMS振動檢測技術現狀 1.1 技術原理與產品形態 MEMS振動傳感器基于壓阻效應、電容效應或壓電效應實現振動信號轉換。典型產品包括: 壓阻式加速度計:通過微機械梁的形變改變電阻值,典型靈敏度為0.209mV/(V·g),適用于低頻振
[嵌入式]
便攜式振動分析儀方案設計介紹
引言 傳統的振動分析儀器具有結構復雜、體積大、操作不方便等特點;而基于單片機的振動采集分析儀雖然體積較小,但是分析能力有限,往往不能夠滿足振動分析與診斷的特殊要求。 本文所設計的振動分析儀以CompactRIO為采集設備,以Labview為軟件開發平臺,不但具有體積小、重量輕的特點,而且具有強大、靈活的專業分析能力,適合于測點分散而又不需要持續檢測的測試場合。 系統結構 系統采用上下位機結構,下位機將采集到的轉速和振動信號通過TCP/IP協議傳送給上位機,上位機進行數據保存與分析。結構如圖1所示。 圖1 系統結構簡圖 通過在線分析工具,操作者可以實時檢測發動機振動是否超標,離線分析工具
[測試測量]
 電氣通信中的信號與噪聲入門(英文第五版)
電氣通信中的信號與噪聲入門(英文第五版) 操作系統真相還原
操作系統真相還原
小廣播
熱門活動
換一批
更多
最新嵌入式文章

更多開源項目推薦
- LT3973EMSE-3.3 5V 降壓轉換器的典型應用,適用于汽車應用
- SPX-14804、Atto84 和 Arduino Bootloader 開發套件
- 使用 ON Semiconductor 的 NCP304LSQ15T1 的參考設計
- 使用 Infineon Technologies AG 的 OMR7812NM 的參考設計
- 智能動態天氣多彩桌面時鐘
- 電紙屏時鐘
- LT3970IDDB-3.3 12V 降壓轉換器的典型應用
- LTC3838EUHF-1 4.5V 至 26V 輸入、1.2V/15A 和 1.5V/15A 雙路輸出、350kHz、DCR 檢測、DTR 使能、降壓轉換器的典型應用電路
- 用于完整 3V、12 位、1MHz 模數轉換系統的 AD8602DRZ-REEL 運算放大器的典型應用
- 高保真便攜藍牙耳放(PCM1794A+TPA6120方案)
更多精選電路圖






更多熱門文章
更多每日新聞
更多往期活動
04月23日歷史上的今天
廠商技術中心







 京公網安備 11010802033920號
京公網安備 11010802033920號