一 概述
在IPM電動機設計當中,經常會使用具有強磁力的稀土燒結永磁體,其產生的轉矩除了由永磁體產生的永磁轉矩之外,通常還會伴隨由d軸電感和q軸電感之間的差而產生的磁阻轉矩。因此IPM電機具有效率高、寬廣的調速范圍的特點,經常用于電動汽車等的牽引電機中。在實際應用中牽引電機的效率會隨著轉速和負載變化而變化,其在設計時就需要建立考慮多工況點的效率圖來分析其綜合性能。
創建效率圖常用方法是通過計算電機電壓方程和轉矩方程來得到的,但是使用這種方式不會計算到電機的PWM鐵損以及線圈交流損耗等因素,因此使用這種方法可能會高估電機的性能。所以想要得到精確的仿真結果還需要考慮PWM和交流損耗等;而考慮PWM和導體交流損耗在JMAG當中是可以做到的。
在本文檔中,創建了一個考慮PWM引起的交流損耗的IPM電機效率圖案例,并與不考慮交流損耗的電機效率圖進行了比較。以此來分析交流損耗對電機效率圖的影響。
二 分析方法
當不考慮交流損耗時,效率map圖的計算方法是使用在直流電阻施加正弦電流的方法進行計算,當考慮交流損耗時,效率map圖的計算方法是提前確定每個工作點的電流矢量,進而驅動電機控制,然后計算每個工作點的電機轉矩和損耗,最后繪制效率圖。在使用JMAG仿真時,通過以下兩種模式分別來繪制考慮和不考慮交流損耗的效率圖:速度優先模式、精度有限模式。
另外,由于精度優先模式需要考慮每個點的交流損耗,所以其所設置內容及仿真所需時間都大大增加,JMAG針對這方面的加速仿真設置有以下兩點:
1、JMAG可以在速度優先模式基礎上一鍵生成精度優先效率圖分析,如圖2-1所示;其可以選擇是否更換為考慮渦流損耗原件、是否創建PWM電路、是否創建RT模型等;
2、根據效率圖分析研究(速度優先模式)的結果,建立了一維模型(JMAG-RT模型)。將JMAG-RT模型應用于效率圖分析研究(精度優先模式)的控制電路,可以實現更快地進入穩定狀態,縮短運算時間。本案例研究與繪制的效率圖與JMAG-RT模型的關系如圖2-2所示。
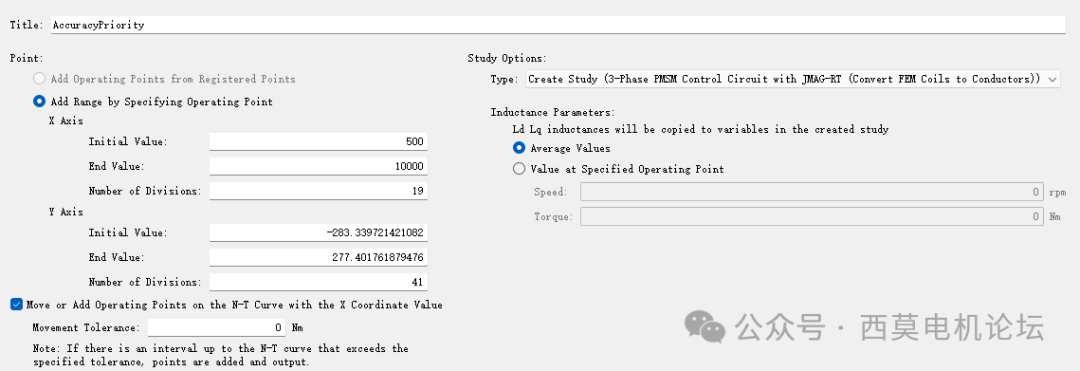
圖2-1 速度優先一鍵生成精度優先效率圖

圖2-2 效率圖分析模型
三仿真流程
3.1 分析模型
分析在8極48槽IPM電機的1/8模型上進行,設定的電機條件如圖3-1所示。

圖3-1 電機模型
驅動條件:確定電機控制電源、控制方法、載波頻率、最大轉速、母線電壓等,設定如表3-1所示。
表3-1 驅動條件設定
| 條件 | 設定 | |
| 電機控制 | 驅動方式 | 三相正弦波 |
| 控制方法 | 最大效率控制 | |
| 最大轉速 | 9000rpm | |
| 載波頻率 | 6000Hz | |
| 逆變器 | 最高工作電壓 | 600V |
| 最大電流 | 250A | |
3.2 速度優先仿真
本文章的目的是對比考慮和不考慮交流損耗電機性能的差異。首先使用JMAG速度優先模式算出不考慮交流損耗的效率map圖。之后根據速度優先模式結果建立了JMAG-RT模型以及精度優先仿真模型,再進行精度優先仿真分析,最后對比兩者差異。
3.2.1響應表設置
響應表分辨率的精細度由以下兩點確認:其一是繪制效率圖是否考慮交流損耗,其二為是否創建1D電機模型。以下是本文章中速度優先模式中根據這兩點的定義對響應表分辨率的設置:
(1) 繪制不考慮交流損耗的效率圖:
a.電流劃分為4個等級以上;
b.相位在0–90度范圍內,劃分為4個等級以上;
c.速度劃分3個等級以上,且最大值為駕駛條件下的最大轉速。
(2) 創建1D電機模型
a.電流設置為包括駕駛條件下最大電流值,劃分為8個等級以上;
b.相位包括0–180度,劃分為8個等級以上;
c.速度劃分為3個等級以上, 且最大值為駕駛條件下的最大轉速。
另除了上述兩種情況,如果分析需要或者是在非線性較強的情況下,分辨率可以設得更高。本例中,設置較高分辨率來創建具有更精細分辨率的1D電機模型,如表3-2所示:
表3-2 分析設定
| 輸入 | 設定值 |
| 電流,A | 1, 10,20,30,50,75,100,150,200,250, 300,400,500,600,700 |
| 相角,deg | 0,10,20,30,40,50,60,70,80,90,100,110,120,130,140,150, 160,170,180 |
| 設定值,r/min | 500, 1000,2000,3000, 4000,5000,6000, 7000,8000,9000 |
3.2.2 電路設置
速度優先模式只需將三相正弦交流電施加到線圈上驅動電機即可。電路圖如圖3-2所示。
注:在JMAG的效率圖分析研究(速度優先模式)中,電源設置由[CreateResponseTable]對話框(即表3-2)中的設置決定,因此此處三相電流源參數可設置為任意值。

圖3-2 速度優先電路圖
3.3 精度優先仿真
如前所述,在JMAG中精度優先效率圖分析可以基于速度優先模式效率圖來創建;創建方法如圖2-1所示。
3.3.1 精度優先分辨率
為了確保計算結果的準確性,精度優先模式下速度軸和轉矩軸的分辨率均設置為10個等級以上。并且所選擇的工作點要包括不考慮AC損耗的分析中獲得效率圖的最大轉矩點。
創建考慮交流損耗的效率圖時,是從不考慮交流損失的效率圖中提取運行點的。如圖3-3所示,本文章運行點的提取方式為:在低速到高速區域的范圍中,運行點在每個速度下被劃分為大約21個部分。

圖3-3 精度優先模式需要提取的運行點
3.3.2網格設置
精度優先模式分析要考慮在導體上施加交變磁場產生渦電流。而由于趨膚效應,在頻率較高的情況下渦電流會向導體表面偏移。因此導體表面上網格的厚度(即集膚厚度)也是必須考慮的因素;集膚厚度的估算見式4.7。
 (4.7)
(4.7)
δ:集膚深度,m f:頻率,Hz μ:磁導率,H/m σ:電導率,S/m
另外由于實際當中需要考慮多工況頻率,導體網格也要考慮每個頻率的偏差;表現在JMAG有限元仿真當中即是使用集膚網格來捕捉,其方法即為根據基波的頻率來確定集膚厚度,根據槽諧波的頻率來確定網格劃分數量。而根據式4.7可知,理論上轉速500rpm時集膚厚度為11.275mm,轉速為9000rpm時的集膚厚度為2.658mm;由于創建集膚網格來表示渦流時,其集膚厚度應為其厚度的兩倍左右(兩條邊):即500rpm時集膚厚度為22.55毫米,9000rpm時集膚厚度為5.316毫米。而在本例中導體的寬度和高度分別為3.5mm、4.5mm,其小于計算渦流時的集膚厚度;因此本案例不考慮導體中的電流密度分布也可,為了確保計算精度將導體網格尺寸設置為0.5毫米,約為導體短邊的1/4即可。
為了確保計算精度,需要在磁場會產生劇烈變化的區域(定子鐵芯)進行更精細的網格劃分。在本文章中,設置了定子鐵芯網格尺寸1.5mm,為齒尖1/4左右。
3.4RT模型仿真
計算精度優先效率圖時RT模型的作用是將分析運行到穩定狀態,然后使用穩定狀態的結果來進行精度優先效率圖,通過這種方法可以減少計算效率圖所需時間。
在本案例中,首先使用JMAG-RT模型運行計算,直到轉矩達到穩定狀態后,再切換到有限元分析,直到有限元分析時轉矩、Id和Iq也達到穩定狀態。這種方法需要在分析的研究屬性里面設定 [Stopthe analysis when steady state is reached],來對有限元分析中的運行穩態測定。本文章中穩態判定條件如表3-3至表3-5所示。有關獲得Id和Iq的組件以及使用JMAG-RT確定穩態的詳細信息,請參見3.5 表3-3 穩定條件(扭矩)
| 輸入 | 設定 |
| 目標類型 | 轉矩 |
| 目標 | 轉子轉矩 |
| 方法 | 平均值 |
| 周期性? | 1/頻率s |
| 容差 | 1% |
表3-4穩態條件(Id)
| 輸入 | 設定 |
| 目標類型 | 控制 |
| 目標 | 實際Id(PWM控制電路) |
| 方法 | 平均值 |
| 周期性 | 1/頻率s |
| 容差 | 1% |
表3-5穩態條件(Iq)
| 輸入 | 設定 |
| 目標類型 | 控制 |
| 目標 | 實際q(PWM控制電路) |
| 方法 | 平均值 |
| 周期性 | 1/頻率s |
| 容差 | 1% |
3.5 控制電路
精度優先模式分析在速度優先分析后通過建立的控制電路來考慮PWM的影響;本文章采用的分析方法是開始時采用JAMG-RT模型計算瞬態,達到穩態后再進行有限元分析,此種方式大大縮短了分析時間。當從速度優先模式創建精度優先模式分析時,JMAG-RT模型的文件路徑已經在宏組件內部自動設置好了;所生成的控制電路如圖3-4所示。


圖3-4 控制電路
四 分析結果
4.1 效率圖對比
不考慮PWM交流損耗的效率圖如圖4-1所示,考慮PWM交流損耗的效率圖如圖4-2所示。對兩者進行了比較,效率的差異圖如圖4-3所示,銅損的差異圖如圖4-4所示。
從圖4-3可分析出,低中速時,考慮交流損耗和不考慮交流損耗之間的差異約為1個點,高速時,差異為2-5個點甚至更大;當效率在90%以上時,在牽引電機中這種差異會影響計算精度。從圖4-4可分析出,高速時,銅損存在明顯差異,由此可得出高速時銅損很大程度上取決于是否考慮了交流損耗。而同樣的是否考慮交流損耗也是圖4-3所示效率差異的主要原因。

圖4-1 不考慮交流損耗的效率圖

圖4-2 考慮交流損耗的效率圖

圖4-3 效率差異圖

圖4-4 銅損失率圖
4.2 損耗對比
分解圖4-4所示的低速低負載和高速低負載下的損耗分量,可得到如圖4-4所示的磁滯損耗、渦流損耗、PWM渦流損耗、銅損的占比圖,其中考慮交流損耗時定子鐵心的渦流損耗頻域分量如圖4-6所示(PWM的載波頻率為6000Hz);從圖4-5和圖4-6可以得出:PWM諧波分量對低速低負載時渦流損耗的影響較大。(注:在不考慮交流損耗的分析中,PWM引起的鐵耗是在后處理中獲得的,與考慮交流損耗相比其分析結果差異較小。)
圖4-7顯示了高速低負載下損耗分量,圖4-8顯示了考慮交流損耗時磁力線和電流密度的頻率分量分布。從圖4-7可以看出,在高速低負荷時,PWM引起的渦流損耗影響不大,但在銅損耗中是否考慮交流損耗差異較大。從圖4-7可以看出,銅損耗的差異是因為由于槽內漏磁引起的渦流的差異。

不考慮交流損耗 考慮交流損耗
圖4-5 低速低負荷時損耗分量圖

圖4-6 低速低負荷時定子鐵心渦流損耗頻率分解

不考慮交流損耗 考慮交流損耗
圖4-7 高速低負荷時損耗分量圖

基波分量 PWM諧波分量
圖4-8 高速低負荷磁通線路頻率分量及電流密度分布
五 總結
本文分別采用了速度優先模式、精度優先模式來分析是否考慮PWM損耗及渦流損耗的差異;并對兩者進行了對比分析;通過對比得出不考慮PWM損耗及渦流損耗時效率偏大,并且隨著轉速的提升得到的結果差異越來越大,高速區時其與考慮PWM損耗及渦流損耗時的效率相差2-5個點左右。
文章內采用的先進行JMAG-RT模塊運算再進行有限元分析的方法,大大減小了精度優先模式效率圖分析的時間,為能夠更精準、更快速地計算出牽引電機的效率圖提供了更好的解決方案。
上一篇:工業機器人的傳動機構解析
下一篇:電路實物接線技巧與線徑快速估算方法
- 熱門資源推薦
- 熱門放大器推薦
 汽車電工電子技術基礎實驗實訓指導書
汽車電工電子技術基礎實驗實訓指導書 ICL7614BCTV
ICL7614BCTV







- 有獎直播:聯詠安防監控方案及未來技術方向 報名開始啦!
- 是德科技有獎直播:灣區圓桌派-穿越頻譜壁壘:毫米波技術的創新之路
- 有獎活動|Mentor PCB 手冊:《利用自動驗證消除原理圖設計錯誤》
- 全新吉時利4200A SCS參數分析儀震撼上市,邀您參與翻蓋有禮!
- ADI有獎下載活動之13升級版ADI電機控制解決方案—伺服控制
- 【贈書100%有禮】一本書教你如何開發測試系統,深入了解數據采集系統
- 有獎直播|魏德米勒 OMNIMATE® 聯接技術的創新發展
- 申請ST NUCLEO-G071RB測評,給你最佳性價比體驗
- 有獎直播:低功耗、小尺寸&高溫環境、帶觸摸功能——瑞薩電子最新16位RL78/G系列單片機介紹
- 力源&安森美有獎直播:RSL15 - 安森美更高效更智能更安全的 BLE 5.2 藍牙芯片







 京公網安備 11010802033920號
京公網安備 11010802033920號