工業(yè)相機是機器視覺系統(tǒng)的重要組成部分之一,在機器視覺系統(tǒng)中有著非常重要的作用。工業(yè)相機已經(jīng)被廣泛應用于工業(yè)生產(chǎn)線在線檢測、智能交通,機器視覺,科研,軍事科學,航天航空等眾多領域。 工業(yè)相機的主要參數(shù)包括:分辨率、幀率、像素、像元尺寸、光譜響應特性等。下面我們來對工業(yè)相機幀率的相關知識進行講解:
幀率(Frame rate)是用于測量顯示幀數(shù)的量度。所謂的測量單位為每秒顯示幀數(shù)(Frames per Second),簡稱:FPS或“赫茲”(Hz)。
由于人類眼睛的特殊生理結構,如果所看畫面之幀率高于16fps的時候,就會認為是連貫的,此現(xiàn)象稱之為視覺暫留。這也就是為什么電影膠片是一格一格拍攝出來,然后快速播放的。
每秒的幀數(shù)(fps)或者說幀率表示圖形處理器處理場時每秒鐘能夠更新的次數(shù)。高的幀率可以得到更流暢、更逼真的動畫。一般來說30fps就是可以接受的,但是將性能提升至60fps則可以明顯提升交互感和逼真感,但是一般來說超過75fps一般就不容易察覺到有明顯的流暢度提升了。如果幀率超過屏幕刷新率只會浪費圖形處理的能力,因為監(jiān)視器不能以這么快的速度更新,這樣超過刷新率的幀率就浪費掉了。
最大幀率(Frame Rate)/行頻(Line Rate):即相機采集傳輸圖像的速率,對于面陣相機一般為每秒采集的幀數(shù)(Frames/Sec.),對于線陣相機為每秒采集的行數(shù)(Hz)。
相機幀率和曝光時間的關系:
有人問,為什么我們在使用工業(yè)相機的時候,將相機的曝光時間增加以后,相機的幀率就下降,而且下降得很厲害,相機的幀率和曝光的關系是怎樣,如果想要獲得固定的幀率,相機的曝光時間應該怎么設置?因此寫下本文,解答了朋友的問題,也使用Sentech相機來做過相關的測試,幀率和曝光時間跟本文中所述一致。詳細原理見下文所示:
曝光和傳感器讀數(shù)
相機上的圖像采集過程包括兩個截然不同的部分。第一部分是曝光。曝光完成后,進行第二部分Readout過程即從傳感器的寄存器中讀出數(shù)據(jù)并傳送出去(Readout過程)。
關于圖像采集過程中,相機操作有兩種常見的方法:“non-overlapped”的曝光和“overlapped”的曝光。在非重疊(“non-overlapped”)模式中,每個圖像采集的周期中,相機在下一個圖像采集開始前,均要完成曝光/讀出整個過程。如圖1所示。
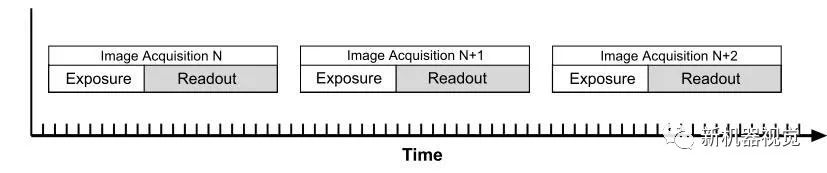
Fig.1 Non-overlapped Exposure
雖然非重疊(“non-overlapped”)的模式,可適合于許多情況下,但它并不是最有效的方式。為了提高相機的幀率,允許在下一幀圖像開始曝光時候,將前一幀獲得的圖像數(shù)據(jù)讀出并傳送出去。相機“重疊”(“overlapped”)曝光的方式見圖2所示。
從圖2中我們可以看到,相機讀出數(shù)據(jù)和下一幀曝光開始出現(xiàn)重疊的情況,在同一個時刻內,相機執(zhí)行兩個操作,導致在同樣的單位時間內,在“overlapped”曝光模式下,可以采集到更多的圖片,即相機的幀率更高。

Fig.2 overlapped Exposure
從上邊兩個圖中,我們可以知道在“non-overlapped”的曝光和“overlapped”的曝光模式底下,一幀圖像的周期存在著這樣的關系: 'overlapped”的曝光模式下: FramePeriod ≤Exposure Time + ReadoutTime
“non-overlapped”的曝光模式下:FramePeriod > Exposure Time + Readout Time
以STC-A202A為例:

圖1 Spec
從Spec中可知,其Pixel Frequency為:36.8181MHz,所以1Clock的時間為1/36.8181Mhz =27.3836ns,接下來我們看相機的Timing chart,首先先看HorizontalTiming,見圖2所示:

圖2 Horizontal Timing
從圖2中,我們從中可讀到的信息為,1 CLK=27.1605 nseconds,和我們從spec上得到的Pixel Frequency算出來的時間差不多。掃描1Horizontal需要1920CLK,即1H =27.1605*1920 =52148.16ns=52.14816us
接下來看相機Vertical Timing 見圖3所示:

圖3 Vertical Timing
從圖3中,我們可讀出的信息為,1H=52.1482useconds,和我們通過圖2計算出來horizontal Scanning的時間一致,而在一幀圖像中,需要掃描1252H,其中Effective Pixels為1220H,即1幀圖像中,Effective Pixels Read out的時間為1220*52.1482 =63620.804us =63.620804ms,一個VD信號,所用的時間為:1252*52.1482=67793.5464us =67.7935464ms。按照我們前邊的理論,一個cycletime內,一幀圖像的時間為:Frame Period = Exposure Time +Readout Time
而我們知道STC-A202A的幀率為:15fps,即1 Frame Period =1/15 =66.7ms。
所以在“non-overlapped”exposure 模式下,ExposureTime = Frame Period – Readout Time =66.7ms -63.6ms =3.1ms,在此模式下,若是超過3.1ms的曝光時間,其幀率就會比標準幀率15fps低。
假如1顆相機Readout Time為:66.7ms,即數(shù)據(jù)傳輸時間為A,A=66.7ms,曝光時間為B,B=5ms,則一幀圖像的時間為C,則C=A+B=66.7ms + 5ms =71.7ms,則這顆相機的幀率為:1000/71.7 =13.94FPS,則這顆相機的幀率為13.94.
注意:一般情況下,若我們的相機的幀率為15fps,則表示相機ReadOut數(shù)據(jù)的時間為1000ms/15 =66.7ms
上一篇:一分鐘看完看懂電機的接線方法
下一篇:伺服電機與步進電機相比
- 熱門資源推薦
- 熱門放大器推薦
 汽車電工電子技術基礎實驗實訓指導書
汽車電工電子技術基礎實驗實訓指導書 5962-01-182-1805
5962-01-182-1805




- 用于 LCD 背光的 24 至 36 個 LED 調光 LED 驅動器
- 帶有 SemPulse 接口的 6 個 LED 的 SC654 光管理單元的典型應用
- IP2368[PD100瓦2到6串鋰電充放電模塊]
- KIT33984CEVBE: 評估套件 - 33984,雙4mOhm高邊開關
- 【涂鴉智能】物聯(lián)網(wǎng)溫濕度計
- EVAL-ADM3050EEBZ,用于評估 ADM3050E 5.7kV rms、信號隔離、基本 CAN FD 收發(fā)器的評估板
- KIT34717EPEVBE: 支持MC34717EP雙開關模式電源-雙同步,降壓開關穩(wěn)壓器
- PCA9505 40-bit I2C-Bus I/O端口典型應用
- 適用于 ATCA 背板的 MOSFET 功率驅動器參考設計
- AM6TW-4818SH35Z 18V 6瓦雙輸出DC/DC轉換器的典型應用






- IAR推動嵌入式開發(fā):云就緒、可擴展的CI/CD和可持續(xù)自動化
- 特斯拉宣布自家 4680 電池生產(chǎn)線在成本效益上已超越外部供應商
- 賦能AI與能源及數(shù)字化轉型,TDK解決方案亮相慕尼黑上海電子展
- 英偉達工程師修改 Linux 內核致 AMD GPU 性能下降,后又將其修復
- 臺積電、Intel合資運營代工業(yè)務,分析師潑冷水
- 行業(yè)首款20kV耐壓高壓繼電器亮相2025慕尼黑上海電子展
- 從實驗室到工業(yè)場景:優(yōu)艾智合密集發(fā)布7款人形機器人
- 地表最酷人形機器人,拿下新一輪2億元融資
- 自動駕駛警示:沒有企業(yè)能完全避免自動駕駛在復雜環(huán)境中的失誤
- 高階就高級嗎?我們到底該如何使用智能駕駛輔助?
- 江豐電子:目前,公司5nm技術節(jié)點的部分產(chǎn)品已經(jīng)通過評價
- 任正非:現(xiàn)在5G沒那么大市場空間,炒作過熱
- 臺媒:聯(lián)發(fā)科可望成2021年全球最大的移動芯片供應商
- 花旗:蘋果下月將把股東回報規(guī)模提高至4000億美元
- 訂單飽滿、產(chǎn)能供不應求,通富微電、長電等披露產(chǎn)能情況
- Uber無人駕駛出事故,為何要唱衰AI?
- 錦浪科技斬獲“2018頂級逆變器品牌”
- 三晶發(fā)布i家系列戶用光伏逆變器產(chǎn)品及運維平臺
- 研究:光伏逆變器市場競爭激烈 2017年成績斐然 2018又將如何發(fā)展?
- 光伏并網(wǎng)逆變器諧波危害及抑制策略







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號