正文
正如前文《車載以太網(wǎng)基礎(chǔ)篇之EthIf》所述,Eth Driver將作為配置以太網(wǎng)的底層驅(qū)動(dòng),不僅能夠被EthIf來(lái)進(jìn)行調(diào)用,同時(shí)能夠滿足Eth收發(fā)器驅(qū)動(dòng)的調(diào)用需求,因?yàn)橛斜匾钊肓私庀萝囕d以太網(wǎng)驅(qū)動(dòng)(Eth Driver)在整個(gè)AUTOSAR層級(jí)中所扮演的重要作用。
如下圖1所示,Ethernet If模塊不僅會(huì)直接控制Ethernet Driver,如果存在Ethernet Switch驅(qū)動(dòng)或者Ethernet Transiver驅(qū)動(dòng)時(shí),那么就會(huì)間接控制Ethernet Driver模塊,總而言之,以太網(wǎng)驅(qū)動(dòng)不僅能夠完成以太網(wǎng)數(shù)據(jù)的正常收發(fā),同時(shí)也能夠?qū)崿F(xiàn)針對(duì)以太網(wǎng)網(wǎng)關(guān)或者以太網(wǎng)收發(fā)器的直接配置。

圖1 Ethernet Driver與其他以太網(wǎng)驅(qū)動(dòng)關(guān)系
AUTOSAR層次關(guān)系
按照AUTOSAR標(biāo)準(zhǔn)文檔規(guī)范,有關(guān)Eth Driver模塊在整個(gè)AUTOSAR軟件架構(gòu)的具體位置描述如下圖2所示:

圖2 Eth Driver與以太網(wǎng)協(xié)議棧關(guān)系
如上圖所示,可以得出如下幾個(gè)基本結(jié)論:
一個(gè)以太網(wǎng)協(xié)議棧中可以存在多家供應(yīng)商的以太網(wǎng)控制器,同時(shí)針對(duì)每家供應(yīng)商的控制器進(jìn)行單獨(dú)控制,互不影響;
同一供應(yīng)商的以太網(wǎng)控制器可以存在多個(gè),但使用的以太網(wǎng)控制器驅(qū)動(dòng)可以僅使用同一套;
上述三家不同供應(yīng)商的以太網(wǎng)驅(qū)動(dòng)作為標(biāo)準(zhǔn)AUTOSAR MCAL的一部分,能夠完全實(shí)現(xiàn)與底層硬件的解耦;
模塊主體功能
Eth Driver作為車載以太網(wǎng)協(xié)議棧最為重要的底層構(gòu)件,小T將帶領(lǐng)大家從以下幾個(gè)層面初步了解認(rèn)識(shí)以太網(wǎng)驅(qū)動(dòng):
以太網(wǎng)各個(gè)不同驅(qū)動(dòng)內(nèi)部的索引關(guān)系如何設(shè)定?
以太網(wǎng)驅(qū)動(dòng)如何進(jìn)行數(shù)據(jù)發(fā)送;
以太網(wǎng)驅(qū)動(dòng)如何進(jìn)行數(shù)據(jù)接收;
以太網(wǎng)驅(qū)動(dòng)特性如QoS,硬件時(shí)間戳,Offloading都具備什么功能?
在以太網(wǎng)驅(qū)動(dòng)常見(jiàn)的通信協(xié)議如MDIO,DMA如何在驅(qū)動(dòng)中發(fā)揮作用?
驅(qū)動(dòng)索引規(guī)則
如下圖3所示,每個(gè)以太網(wǎng)驅(qū)動(dòng)彼此都是獨(dú)立的,同時(shí)其索引編號(hào)是從0開(kāi)始,但是每個(gè)驅(qū)動(dòng)內(nèi)部的bufidx均可以從0開(kāi)始,彼此之間互不干擾。

圖3 Eth Driver索引關(guān)系
數(shù)據(jù)發(fā)送過(guò)程
上層應(yīng)用如果需要通過(guò)Eth Driver將數(shù)據(jù)發(fā)送出去,那么就需要通過(guò)EthIf模塊間接調(diào)用Eth Driver的發(fā)送函數(shù)Eth_Transmit來(lái)完成數(shù)據(jù)的發(fā)送。
其中EthIf模塊的數(shù)據(jù)發(fā)送功能分為兩者模式,一種是Polling模式,另外一種就是Interrupt模式,一般而言都優(yōu)先采用中斷模式來(lái)滿足系統(tǒng)實(shí)時(shí)性要求。
如下圖4為Polling模式,在Polling模式中可以看到在EthIf_MainfunctionTx函數(shù)中會(huì)去輪詢是否發(fā)送成功的標(biāo)志,這個(gè)也是Polling模式的典型特征。
Polling模式

圖4 數(shù)據(jù)發(fā)送Polling模式
Interrupt模式
如下圖5所示為以太網(wǎng)數(shù)據(jù)發(fā)送的中斷模式,中斷模式相比Polling模式可以看出并沒(méi)有使用到EthIf_MainfunctionTx函數(shù),而是使用Eth模塊的中斷函數(shù)來(lái)確認(rèn)發(fā)送是否成功。

圖5 數(shù)據(jù)發(fā)送中斷模式
數(shù)據(jù)接收功能
同理相比數(shù)據(jù)發(fā)送功能,EthIf模塊的數(shù)據(jù)接收功能也可以分為Polling模式與中斷模式兩種,如下圖9所示為EthIf模塊的數(shù)據(jù)接收Polling模式。
如下圖6所示,如果EthIf模塊數(shù)據(jù)接收采用Polling模式,那么就需要使用到EthIf_MainfunctionRx函數(shù),在該函數(shù)中去調(diào)用EthIf_RxIndication來(lái)告知上層數(shù)據(jù)已成功被接收,使用該模式會(huì)大大降低數(shù)據(jù)接收效率,一般接收優(yōu)先采用中斷模式。
Polling模式

圖6 數(shù)據(jù)接收Polling模式
Interrupt模式
如下圖7所示為EthIf模塊的數(shù)據(jù)接收中斷功能,在該模式中可以看到通過(guò)Eth模塊通過(guò)中斷函數(shù)來(lái)進(jìn)而告知上層數(shù)據(jù)已被接收。

圖7 數(shù)據(jù)接收中斷模式
驅(qū)動(dòng)特性簡(jiǎn)介
以太網(wǎng)驅(qū)動(dòng)相比其他驅(qū)動(dòng)而言,存在很多諸多獨(dú)有的特性,小T將會(huì)帶領(lǐng)大家來(lái)了解這些特性,爭(zhēng)取對(duì)這些特性有個(gè)基本的認(rèn)識(shí),以便我們對(duì)以太網(wǎng)驅(qū)動(dòng)有個(gè)較為全面的了解,應(yīng)用它時(shí)也會(huì)更加得心應(yīng)手。
以下列舉了以太網(wǎng)驅(qū)動(dòng)(網(wǎng)卡)常見(jiàn)的三種特性:Offloading 特性,硬件TimeStamp特性,QoS特性。
Offloading特性
“Offload'顧名思義表示卸載的意思,那么給誰(shuí)卸載以及卸載什么呢?其實(shí)該特性存在的目的就是為了給CPU卸載,卸載的方式如將CRC計(jì)算交給硬件來(lái)做,或者分包組包的動(dòng)作也放在硬件中來(lái)處理,從而減小這部分在以太網(wǎng)協(xié)議棧中的占用時(shí)間,降低軟件運(yùn)行延遲造成的性能不足以及CPU loading過(guò)高等問(wèn)題。
在AUTOSAR規(guī)范中針對(duì)以太網(wǎng)驅(qū)動(dòng)(Eth Driver)發(fā)送或者接收?qǐng)?bào)文的CRC進(jìn)行了Offloading的特別說(shuō)明如下:
對(duì)于IPV4幀,如果EthCtrlEnableOffloadChecksumIPv4設(shè)置成TRUE,那么就可以O(shè)ffloading CRC;
對(duì)于ICMP幀,如果 EthCtrlEnableOffloadChecksumICMP設(shè)置成TRUE,那么就可以O(shè)ffloading CRC;
對(duì)于TCP幀,如果 EthCtrlEnableOffloadChecksumTCP 設(shè)置成TRUE,那么就可以O(shè)ffloading CRC;
對(duì)于UDP幀,如果 EthCtrlEnableOffloadChecksumUDP設(shè)置成TRUE,那么就可以O(shè)ffloading CRC;
值得注意的是這些CRC計(jì)算都僅會(huì)在硬件中完成,對(duì)于接收方而言,CRC校驗(yàn)檢測(cè)會(huì)通過(guò)硬件來(lái)完成,如果CRC校驗(yàn)不通過(guò),那么就會(huì)丟棄該接收到的幀。
硬件TimeStamp特性
如之前文章《AUTOSAR基礎(chǔ)篇之CanTsyn》與《AUTOSAR基礎(chǔ)篇之StbM》所述,大家相比CAN時(shí)間同步有了一個(gè)基本的認(rèn)識(shí)與了解,與CAN時(shí)間同步對(duì)比,以太網(wǎng)時(shí)間同步協(xié)議采用的IEEE1588或者IEEE802.1AS的PTP(Precise Time Protocal)協(xié)議,該協(xié)議需要確認(rèn)使用的網(wǎng)卡(MAC)是否本身支持。
該協(xié)議使用到通過(guò)底層硬件MAC來(lái)打上對(duì)應(yīng)的以太網(wǎng)報(bào)文收發(fā)的時(shí)間戳,能夠最大限度地降低軟件時(shí)間戳所帶來(lái)的不確定性,將時(shí)間同步精度能夠做到微秒甚至是納微秒級(jí)別。
AUTOSAR規(guī)范中定義的EthTsync模塊使用的是雙步端延時(shí)PTP時(shí)間同步協(xié)議,如下為基于該協(xié)議的Time Master與Time Slave兩者之間的交互關(guān)系,后期也會(huì)針對(duì)EthTsync模塊進(jìn)行單一講解,敬請(qǐng)關(guān)注。

圖8 雙步以太網(wǎng)端延時(shí)機(jī)制PTP時(shí)間同步協(xié)議
如上圖8所示,如果是基于單步模式下的以太網(wǎng)端延時(shí)機(jī)制的PTP時(shí)間同步,那么虛線標(biāo)注的部分則不會(huì)有,如果是基于雙步模式下的以太網(wǎng)端延時(shí)機(jī)制的PTP時(shí)間同步,那么虛線標(biāo)注的部分必須要有。
值得注意的是在IEEE802.1AS存在一個(gè)GrandMaster概念,需要通過(guò)BMCA(Best Master Clock Algorithm)來(lái)實(shí)現(xiàn),不過(guò)由于汽車內(nèi)部屬于靜態(tài)網(wǎng)絡(luò),因此只會(huì)存在唯一的GrandMaster,無(wú)需使用到BMCA動(dòng)態(tài)分配確認(rèn)算法。
以太網(wǎng)硬件實(shí)現(xiàn)PTP協(xié)議有如下兩種方式:
以太網(wǎng)MAC控制器支持PTP協(xié)議,常見(jiàn)雙步模式;
有些TI的PHY層也可以支持PTP,不過(guò)一般是單步模式,如果使用AUTOSAR標(biāo)準(zhǔn)的EthTsync模塊,要提前確認(rèn)是否支持雙步模式;
QoS特性
Qos是IEEE 802.1P協(xié)議,該協(xié)議運(yùn)行在以太網(wǎng)第二層,用來(lái)保證在以太網(wǎng)數(shù)據(jù)轉(zhuǎn)發(fā)擁堵時(shí)通過(guò)優(yōu)先級(jí)方式來(lái)保證重要的數(shù)據(jù)包能夠及時(shí)發(fā)送出去。
普通的以太網(wǎng)二層報(bào)文是不包含優(yōu)先級(jí)字段的,IEEE802.1P是IEEE802.1Q(VLAN標(biāo)簽技術(shù))標(biāo)準(zhǔn)的擴(kuò)充技術(shù),彼此之間協(xié)同工作。
802.1Q雖然定義了標(biāo)簽字段,但是并沒(méi)有定義與使用優(yōu)先級(jí),而使用802.1P協(xié)議補(bǔ)充之后便可以正常使用優(yōu)先級(jí),正如IEEE 802.1P與IEEE802.1Q兩者協(xié)同定義的標(biāo)簽字段如下圖9所示:

圖9 IEEE802.1Q標(biāo)簽頭信息
以太網(wǎng)幀通過(guò)QoS特性來(lái)通過(guò)802.1Q標(biāo)簽中的802.1P用戶優(yōu)先級(jí)(COS)來(lái)進(jìn)行標(biāo)記,其優(yōu)先級(jí)具備8級(jí),從優(yōu)先級(jí)0至優(yōu)先級(jí)7,如下圖10所示:

圖10 COS優(yōu)先級(jí)說(shuō)明
通訊協(xié)議介紹
在使用車載以太網(wǎng)驅(qū)動(dòng)的過(guò)程中,我們經(jīng)常性會(huì)碰到如下三種常見(jiàn)的通訊協(xié)議,這三種通訊協(xié)議對(duì)于車載以太網(wǎng)正常工作,非常重要:
MII接口通訊協(xié)議,用于以太網(wǎng)MAC層與物理層收發(fā)器PHY之間的數(shù)據(jù)傳輸協(xié)議;
MDIO通訊協(xié)議,用于以太網(wǎng)MAC層控制PHY的狀態(tài)設(shè)置與獲取協(xié)議;
DMA通訊協(xié)議,用于以太網(wǎng)MAC層與CPU之間的數(shù)據(jù)搬運(yùn)通訊協(xié)議,提高數(shù)據(jù)搬運(yùn)效率,降低CPU負(fù)載;
MII接口通訊協(xié)議基礎(chǔ)介紹
MII接口是IEEE802.3定義的以太網(wǎng)行業(yè)標(biāo)準(zhǔn),該標(biāo)準(zhǔn)就是為了解決,以太網(wǎng)MAC層與PHY之間的兼容性,保證即使更換了不同類型的MAC,PHY始終能夠正常工作。
MII接口隨著技術(shù)的發(fā)展與進(jìn)步,目前已經(jīng)衍生出了多種增強(qiáng)型MII接口,常用的就有MII,RMII,SMII,SSMII,SSSMII,GMII,RGMII,SGMII ,其中對(duì)于車載以太網(wǎng)最為常用的還是RGMII接口。
具體的通訊協(xié)議介紹不在本文中進(jìn)行展開(kāi),該接口的選擇只要軟件上MCAL配置使用對(duì)應(yīng)的MII接口類型,其余都是硬件行為,硬件上保證接口正常連接即可,如下圖11所示,介紹了MII接口在以太網(wǎng)硬件連接上的所處關(guān)系:

圖11 以太網(wǎng)MAC與PHY之間的MII物理連接示意圖
MDIO協(xié)議基礎(chǔ)介紹
首先,MDIO是Management Data Input/Output的縮寫(xiě),且該接口協(xié)議在IEEE802.3中也有所體現(xiàn),是一種專門(mén)用于管理MAC與PHY之間的串口數(shù)據(jù)接口,基本功能如下:
讀取PHY相關(guān)寄存器的值;
獲取PHY的Link及其他工作狀態(tài)等;
設(shè)置對(duì)應(yīng)PHY的工作模式等;
除此之外,MDIO協(xié)議接口是一種實(shí)時(shí),半雙工,串行的數(shù)據(jù)接口,由兩個(gè)線組成,一個(gè)被稱為MDIO線,另外一根則是MDC線。
MDIO線負(fù)責(zé)數(shù)據(jù)的傳輸,MAC與PHY之間可以雙向傳輸,寫(xiě)寄存器時(shí)由MAC驅(qū)動(dòng),讀寄存器由PHY驅(qū)動(dòng),先傳高位(MSB),再傳低位(LSB),且該P(yáng)in腳需要上拉1.5kΩ-10kΩ范圍內(nèi)的電阻。
MDC線負(fù)責(zé)傳遞時(shí)鐘同步信號(hào),只能單向通過(guò)MAC驅(qū)動(dòng),且只能在MDC上升沿對(duì)MDIO線上的數(shù)據(jù)進(jìn)行采樣,該MDC允許最大的時(shí)間頻率一般都通過(guò)PHY決定。
一個(gè)MDIO接口可支持32個(gè)PHY地址,該接口有32個(gè)寄存器地址,其中前16個(gè)寄存器已經(jīng)在標(biāo)準(zhǔn)中定義,其余16個(gè)則有各個(gè)器件廠商自行定義。
根據(jù)IEEE802.3協(xié)議中將MDIO協(xié)議分為兩種幀格式,分別為Clause 22與Clause 45,其中Clause 22主要用于千兆以下的以太網(wǎng)PHY,而Clause 45則用于千兆以上的以太網(wǎng)PHY。
接下來(lái)就針對(duì)Clause 22與Clause 45兩者協(xié)議的基本使用與區(qū)別做個(gè)簡(jiǎn)要說(shuō)明:
Clause 22讀數(shù)據(jù)幀格式如下:

圖12 Clause 22 讀數(shù)據(jù)幀格式
Clause 22寫(xiě)數(shù)據(jù)幀格式如下:

圖13 Clause 22 寫(xiě)數(shù)據(jù)幀格式
Clause 45 地址幀格式如下:

圖14 Clause 45 地址幀格式
Clause 45 讀數(shù)據(jù)幀格式如下:

圖15 Clause 45 讀數(shù)據(jù)幀格式
Clause 45 寫(xiě)數(shù)據(jù)幀格式如下:

圖16 Clause 45 寫(xiě)數(shù)據(jù)幀格式
如下圖17,小T根據(jù)上述Clause 22與Clause 45的幀格式定義,列舉了兩者之間的幀格式的定義說(shuō)明以及區(qū)別聯(lián)系,這樣便于大家對(duì)兩者格式的使用有個(gè)基本認(rèn)識(shí)。
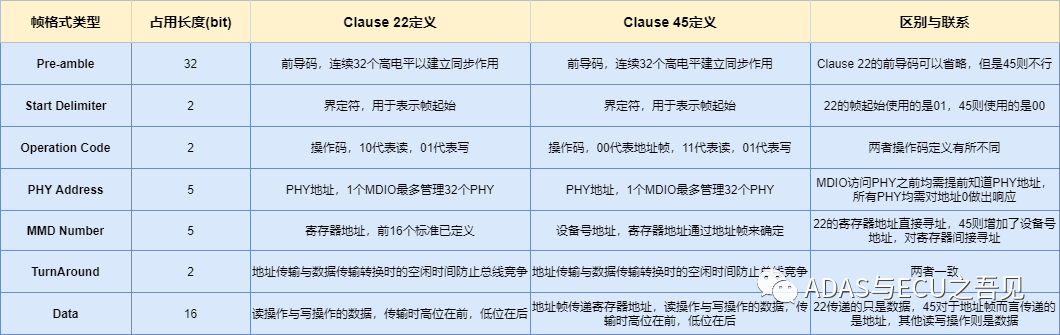
圖17 Clause 22與Clause 45幀格式區(qū)別與聯(lián)系
DMA協(xié)議基礎(chǔ)介紹
DMA協(xié)議對(duì)于使用過(guò)它的朋友而言,特別是做底層驅(qū)動(dòng)開(kāi)發(fā)的朋友應(yīng)該不會(huì)陌生,DMA就是為了在不需要CPU干預(yù)的前提下來(lái)實(shí)現(xiàn)外設(shè)與內(nèi)存之間的搬運(yùn)或者內(nèi)存與內(nèi)存之間的搬運(yùn),那么以太網(wǎng)DMA也是如此,就是為了實(shí)現(xiàn)以太網(wǎng)外設(shè)與內(nèi)存之間的數(shù)據(jù)交換。
本文不會(huì)對(duì)DMA協(xié)議本身做過(guò)多的解釋說(shuō)明,旨在說(shuō)明DMA在以太網(wǎng)數(shù)據(jù)收發(fā)過(guò)程中如何起作用,通過(guò)如下的兩張圖來(lái)了解認(rèn)識(shí)DMA在以太網(wǎng)數(shù)據(jù)收發(fā)過(guò)程中的用途。
以太網(wǎng)DMA發(fā)送
如下圖18所示,Tx ringbuffer作為DMA描述符,DMA在以太網(wǎng)發(fā)送過(guò)程中的作用表現(xiàn):

圖18 以太網(wǎng)DMA發(fā)送過(guò)程
以太網(wǎng)DMA接收
如下圖19所示,Tx Ringbuffer作為DMA描述符,DMA在以太網(wǎng)接收過(guò)程中的作用表現(xiàn):

圖18 以太網(wǎng)DMA接收過(guò)程
常用函數(shù)總結(jié)
為了便于大家更好地使用Eth Driver這個(gè)模塊,小T整理了關(guān)于車載以太網(wǎng)驅(qū)動(dòng)這部分常用的函數(shù)接口與功能說(shuō)明,如下圖19所示:

圖19 以太網(wǎng)驅(qū)動(dòng)常用函數(shù)接口
上一篇:保護(hù)汽車USB電路防電池短路故障
下一篇:新能源汽車驅(qū)動(dòng)電機(jī)發(fā)展趨勢(shì)
推薦閱讀最新更新時(shí)間:2025-04-16 23:22
 MOS驅(qū)動(dòng)電路應(yīng)用手冊(cè)
MOS驅(qū)動(dòng)電路應(yīng)用手冊(cè) 安川伺服驅(qū)動(dòng)器圖紙
安川伺服驅(qū)動(dòng)器圖紙 stm32中的多路pwm例程
stm32中的多路pwm例程





- obu是什么_obu藍(lán)牙怎么打開(kāi)
- obu和etc的區(qū)別
- 電動(dòng)汽車加速快卻最高速度不及燃油車,原因?yàn)楹?/a>
- 汽車用電設(shè)備會(huì)加大發(fā)動(dòng)機(jī)的耗油量嗎
- 汽車起動(dòng)機(jī)直流電機(jī)的組成構(gòu)成及原理分析
- 基于多體動(dòng)力學(xué)對(duì)發(fā)動(dòng)機(jī)結(jié)構(gòu)振動(dòng)進(jìn)行評(píng)判和結(jié)構(gòu)優(yōu)化
- 采用指紋識(shí)別技術(shù)實(shí)現(xiàn)反向?qū)ぼ囅到y(tǒng)的設(shè)計(jì)
- 碳罐電磁閥壞了癥狀_碳罐電磁閥怎么判斷好壞_碳罐電磁閥檢查方法
- 碳罐電磁閥怎么清洗_碳罐電磁閥怎么拆

- FEBFSL3276ALR_IO01U25A,基于FSL3276ALRN 0.25W輔助電源的評(píng)估板
- 電動(dòng)螺絲刀
- LT6656ACS6-3、3V 升壓輸出電流電壓基準(zhǔn)的典型應(yīng)用
- 使用 Omron 的 S8VS-48024B 的參考設(shè)計(jì)
- LEDMODULE6R1GEVB:LED 模塊 6 個(gè) LED 圓形
- LTC3633IUFD 雙通道 3A、12V 同步降壓穩(wěn)壓器的設(shè)計(jì)示例電路
- 150W 通用型熒光燈驅(qū)動(dòng)器
- 具有雙輸入的 LTC3126IFE 3.3V、2MHz 降壓轉(zhuǎn)換器的典型應(yīng)用電路
- CC3D四軸飛行器開(kāi)源資料
- 征集令 |物聯(lián)網(wǎng)WIFI雙路繼電器






- 英特爾攜海信發(fā)布端側(cè)會(huì)議領(lǐng)域垂域模型解決方案,讓商務(wù)會(huì)議更安全更智能
- 英特爾攜手MAXHUB聯(lián)合發(fā)布企業(yè)級(jí)AI PC, 加速AI大模型在端側(cè)落地
- 助力低碳數(shù)字未來(lái) 英飛凌攜多款創(chuàng)新成果亮相2025慕尼黑上海電子展
- ?日清紡微電子科技賦能產(chǎn)業(yè)升級(jí),亮相慕尼黑上海電子展
- 泰克閃耀 2025 慕尼黑上海電子展,引領(lǐng)測(cè)試技術(shù)新變革
- 破局AI眼鏡性能、續(xù)航、成本“不可能三角”:芯原推出高集成度參考設(shè)計(jì)方案
- 人形機(jī)器人成下一風(fēng)口,各大車企紛紛入局,比智能汽車潛力更大?
- 業(yè)績(jī)最高 TDK為汽車應(yīng)用推出電容值達(dá)100V的MLCC
- 微型柔性機(jī)器人:開(kāi)啟智能救援與精準(zhǔn)醫(yī)療新紀(jì)元
- 人工智能加速芯片設(shè)計(jì):動(dòng)態(tài)自適應(yīng)流程引領(lǐng)高效創(chuàng)新
- 直播報(bào)名:TI 用于感測(cè)應(yīng)用、帶可配置信號(hào)鏈元素的新型MSP430™ MCU,報(bào)名直播贏雙重好禮!
- Keysight示波器主題月有獎(jiǎng)系列活動(dòng)之 注冊(cè)大獎(jiǎng)天天抽 搶樓踩中亦有獎(jiǎng)
- 來(lái)翻牌吧!解鎖示波器的N種玩法
- 全新吉時(shí)利4200A SCS參數(shù)分析儀震撼上市,邀您參與翻蓋有禮!
- 有獎(jiǎng)直播:TI DLP® 產(chǎn)品賦能工業(yè)光控領(lǐng)域與創(chuàng)新
- 【EEWORLD第二十五屆】2011年04月社區(qū)明星人物揭曉!
- 蜂窩車聯(lián)網(wǎng)(C-V2X)測(cè)試解決方案|直播已結(jié)束
- 觀看TI IOT解決方案研討會(huì) 答題即可贏取更多精美好禮!
- TI 有獎(jiǎng)直播|業(yè)界超精確3D霍爾效應(yīng)位置傳感器
- 碧桂園擬進(jìn)軍機(jī)器人產(chǎn)業(yè)?
- 燃爆了的機(jī)甲戰(zhàn)士離現(xiàn)實(shí)有多遠(yuǎn) 盤(pán)點(diǎn)《環(huán)太平洋》中的AI黑科技
- 探訪通用武漢工廠:滿眼機(jī)器人 自動(dòng)化率97%
- 澳洲電訊利用無(wú)人機(jī)抓拍EastLink隧道激光雷達(dá)地圖
- 2018出海方向人工智能洞察力投資機(jī)構(gòu)top10
- 對(duì)抗性神經(jīng)網(wǎng)絡(luò)憑啥入選MIT2018十大突破性技術(shù)
- 合肥長(zhǎng)鑫發(fā)力,去年設(shè)備進(jìn)口47.9億名列安徽外貿(mào)第二
- Genesys表彰取得杰出成績(jī)的亞太區(qū)合作伙伴
- 民德電子擬1.39億收購(gòu)元器件分銷商泰博迅睿
- 采用Nordic方案的Thread開(kāi)發(fā)套件 幫助客戶開(kāi)發(fā)云連接的mesh網(wǎng)絡(luò)







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)