相比以往的L2+級別的輔助駕駛,主要是在封閉道路使用,比如高架和高速公路上。城市路面上因為路況更復雜,比如有紅綠燈需要識別并做出決策、道路線也并不連續、還有行人和非機動車進入機動車的道路等等情況,所以自動駕駛的實現有很大的難度。但一旦做成,的確能讓用戶省心不少。所以也被我們在年初的時候,把城市輔助駕駛列為今年值得期待的十大智能車技術之一。
小鵬汽車自動駕駛副總裁吳新宙也說“小鵬的XNGP是無人駕駛實現前,智能輔助駕駛的終極形態。”
Part 1
特斯拉在自動駕駛軟件和算法上的創新
為什么城市輔助駕駛相比之前的輔助駕駛有了飛速提升,需要先介紹一下特斯拉的BEV鳥瞰圖和占有網絡模型。
◎BEV(Bird's-eye-view Perception)模型
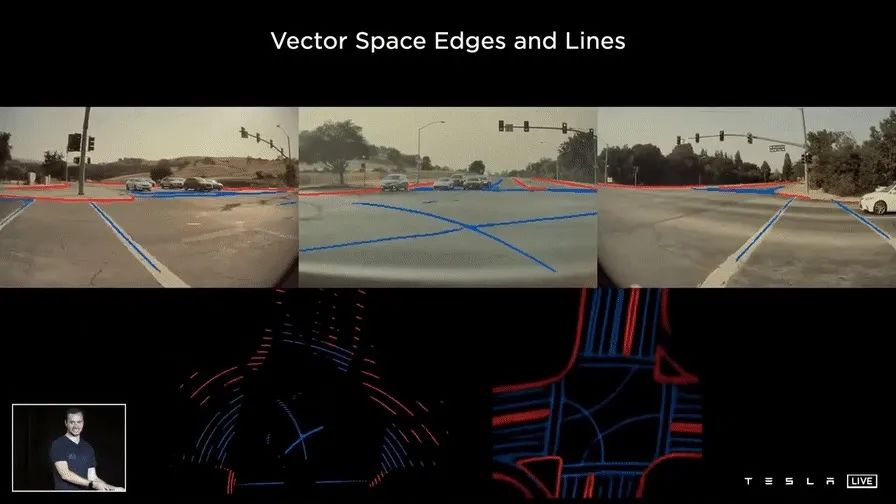
特斯拉自動輔助駕駛的軟件(Tesla Autopilot Software)從 2016 年開始上線1.0版本。到2019年,特斯拉開始用適量空間(Vector Space)的技術對道路線進行識別,并且加入了BEV模型,又叫鳥瞰圖預測模型。
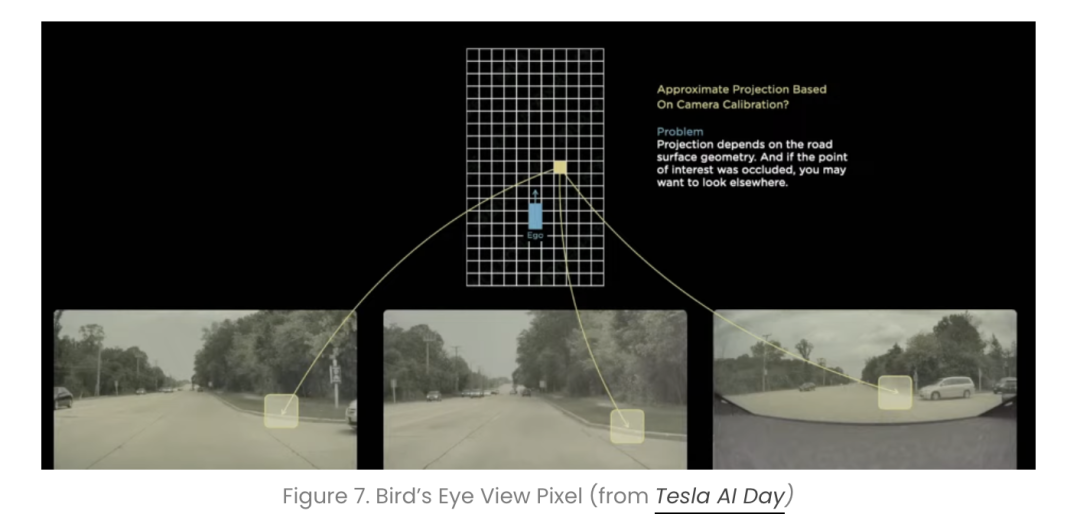
2019-2020, 特斯拉系統性地導入vector space,并且導入了多視角攝像頭的3D目標檢測在鳥瞰圖下的感知(BEV Perception) 。
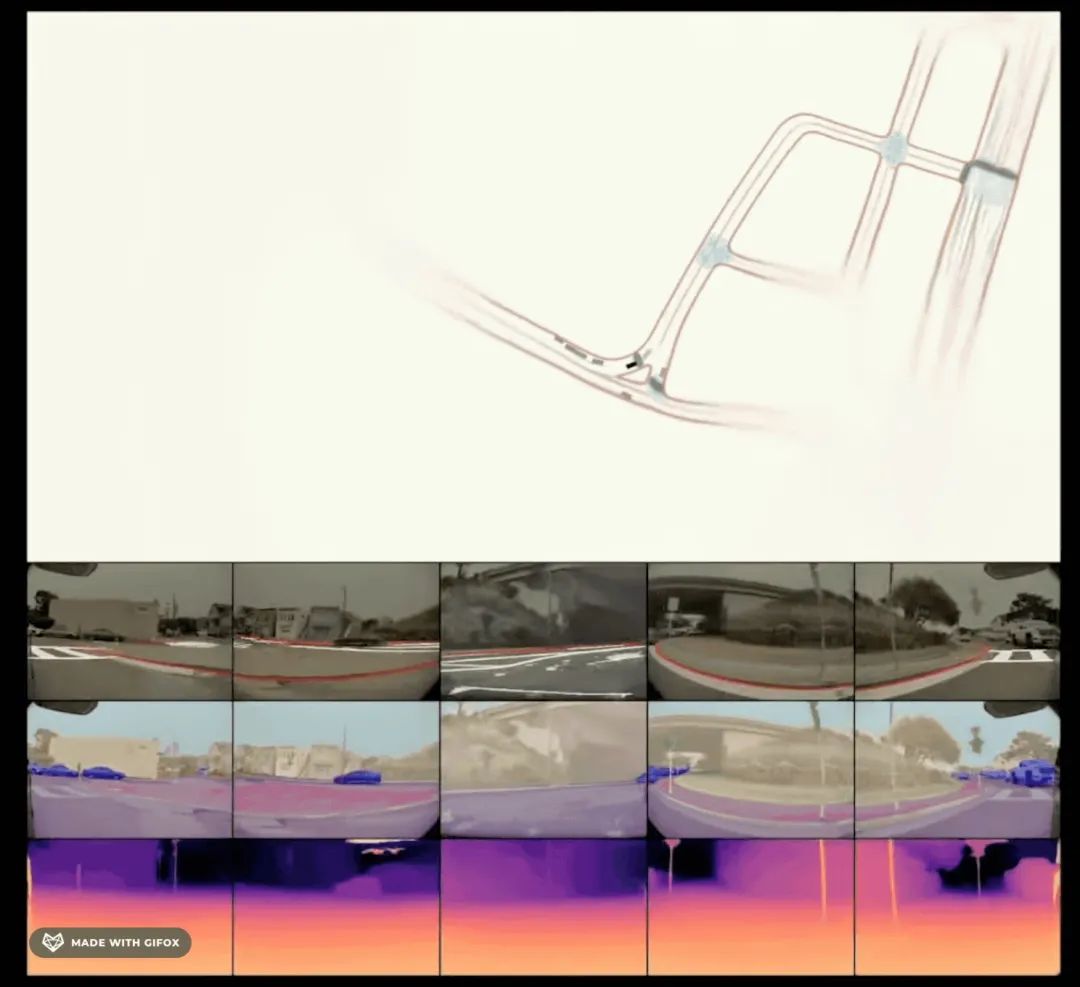
BEV 是特斯拉自動駕駛系統中的一種模型,是一種基于圖像的模型,用于將車輛周圍的環境信息轉換為平面圖。BEV 模型可以通過多個攝像頭捕捉到的圖像來生成車輛周圍的環境信息,然后將這些信息轉換為平面圖,以便自動駕駛系統進行處理和分析。
特斯拉采用 8 個攝像頭采集圖像進行有效融合,通過校正后,一并輸入到神經網絡。順便科普一下,神經網絡就是通過一組算法模擬人腦,是一種稱為深度學習過程,還可以從錯誤中不斷改進。
在自動駕駛中,神經網絡 對采集到的圖像提取特征,進行關聯后,投影到一個矢量空間,就可以實現反映周圍環境的鳥瞰圖BEV的效果。
鳥瞰圖能很好地還原周圍環境,提供自動駕駛所需的2D 圖像信息,類似一張平面的地圖。雖然會缺失一些空間和高度上信息,無法真實地反映物體在 3D 空間實際占用的體積是多少。但在BEV模型中,特斯拉更關心的是那些靜止物體,例如路沿、車道線和柵欄等。
◎占用網絡模型(Occupancy Network)
占用網絡模型是將三維世界劃分為一個網格單元,定義哪個單元被占用,哪個單元是空閑的,還可以把當前場景下被遮擋的靜止物體和動態物體也用體積塊表示出來。通過占用網絡,再結合BEV模型,特斯拉可以對路徑規劃有了更多信息。
Part 2
小鵬NGP
城市智能導航輔助駕駛
小鵬在迭代自動輔助駕駛方面一直向特斯拉看齊,并且導入了自己的設計理念。在泊車、高精度定位和高精度地圖方面有自己的理解,并且率先導入了激光雷達。
小鵬XNGP智能輔助駕駛系統,主要是基于純視覺感知的速度與預測,更精準地識別動態物體速度和意圖,提升駕駛決策的博弈能?。計劃通過三個階段進化成終極的無限接近“無人駕駛”的形態。

今年3月底,小鵬汽車推送了Xmart OS 4.2.0,釋放XNGP第一階段能力:在G9及P7i Max版上,上海、深圳、廣州、等高精地圖覆蓋區域,可以開放點到點的城市智能導航輔助駕駛;在無高精地圖覆蓋區域,開放具備跨線繞行,識別紅綠燈并直行通過路口能力的LCC增強版。
從實際體驗上來講,NGP之前的智能輔助駕駛,主要在有高精地圖的、工況簡單的路段——主要是高速、高架等封閉路面——來實現的;在無高精地圖覆蓋的路段,輔助駕駛只能實現車道居中(在傳感器能識別車道線的情況下)以及自動跟車等簡單功能。
而NGP在高精地圖+工況復雜的城市道路上,依靠BEV鳥瞰圖模型,也能實現高速上的幾乎全程不用接管的輔助駕駛體驗。在沒有高精地圖的道路,NGP第?階段的能力提升,主要是在直?遇到紅綠燈時,具備了自動起停功能。之前的很多L2+的輔助駕駛,都是無法識別紅燈的,只能跟著前車停止或前進;如果遇到紅燈且沒有前車的情況,打開輔助駕駛的車就是妥妥的“闖紅燈”,根本沒法用。所以NGP雖然只是第一階段,但已經讓人對未來充滿更多期待。
今年是城市輔助駕駛技術出現在我們普通人身邊的元年,我們已經看到越來越多的新技術的落地。小鵬、蔚來、華為和后面的理想汽車都會紛紛拿出自己的方案,這將會給消費者帶來更多嘗試的機會,隨著嘗試使用的落地,也會帶動高階自動輔助駕駛的完善和發展,這將極大地促進汽車智能化的持續推進。
上一篇:汽車線束中導線選型方法及使用壽命解讀
下一篇:低壓差線性穩壓器如何滿足汽車攝像頭模塊的功率要求
- 熱門資源推薦
- 熱門放大器推薦
 TLV2464IPWR
TLV2464IPWR







- 嵌入式Rust修煉營直播(第二場):MCU上電后,Rust代碼啟動流程解析
- 南芯SC8905 評估板免費測評,支持充放電雙向操作
- 學AM335X課程,贏超值BB-Black團購資格,更有DIY大獎賽預熱中!
- ADI有獎下載活動之20:基于NDIR和PID的ADI氣體探測器解決方案和新產品
- LPC8N04測評,激發你的NFC&物聯網新創意!
- 2023 DigiKey KOL 系列——將TinyML融入IoT物聯網應用中
- 看東芝在線展會視頻,聽權威汽車技術講解!
- 有獎直播|TE帶您解讀物聯網中的智能天線設計趨勢及傳感器應用案例
- MPS 送福利 | 商城上線送單,送京東卡,8000元好禮等你拿!
- 了解數字功能的模擬控制器,千元好禮等你來拿!







 京公網安備 11010802033920號
京公網安備 11010802033920號