本文內(nèi)容主要圍繞自動駕駛汽車測試場景的內(nèi)涵、作用、尺度、視角以及數(shù)據(jù)來源等方面進(jìn)行了詳細(xì)闡述。
01. 場景要素和場景分類 在進(jìn)行測試場景構(gòu)建時(shí),首先需要明確測試場景所涵蓋的要素。 真實(shí)世界中的場景無窮無盡,要素紛繁復(fù)雜,對場景進(jìn)行分解,提取場景中包含的要素類型,是對現(xiàn)實(shí)世界場景進(jìn)行降維和抽象的基本方法。 為了便于要素的分析及組織,需要對場景要素進(jìn)行分類。根據(jù)不同的組織結(jié)構(gòu),場景要素劃分有多種方式。從自動駕駛測試的需求角度出發(fā),場景要素可以分為環(huán)境要素和自車任務(wù)兩類要素。
從場景要素的基本屬性出發(fā),可以分為靜態(tài)要素和動態(tài)要素等。從場景要素的拓?fù)潢P(guān)系出發(fā),可以分為道路要素、交通參與者要素、氣象要素等。場景要素是測試場景構(gòu)建的基礎(chǔ),對自動駕駛汽車的測試和評價(jià)過程起重要作用,是測評體系的主要支撐。
從場景要素的不同屬性出發(fā),完整的測試場景要素包括: 一定空間范圍內(nèi)的靜態(tài)環(huán)境要素:道路類型、交通設(shè)施、地理信息、靜態(tài)障礙物等。
一定時(shí)空范圍內(nèi)的動態(tài)環(huán)境要素:如動態(tài)交通指示設(shè)施及通信環(huán)境信息。

行駛環(huán)境中的交通參與者要素:機(jī)動車、非機(jī)動車、行人和動物等。而被測車輛不屬于該要素類別,主要原因是其行為不一定必須是預(yù)定義的。
該行駛環(huán)境中的氣象環(huán)境要素:光照、溫度、濕度、氣候等。
車輛的初始狀態(tài):Ego被測車輛的初始狀態(tài)、目標(biāo)和行為要素等。

測試場景進(jìn)行分類。具體分類方法包括以下幾類: 1.按測試場景的數(shù)據(jù)來源進(jìn)行分類,如自然駕駛數(shù)據(jù)、危險(xiǎn)工況數(shù)據(jù)、標(biāo)準(zhǔn)法規(guī)等來源形成的測試場景,主要用以測試自動駕駛功能的有效性、安全性等。 2.按道路結(jié)構(gòu)層次機(jī)械能分類,道路基礎(chǔ)路網(wǎng)場景、非結(jié)構(gòu)化道路場景、靜態(tài)場景和動態(tài)場景等。景等不同層次的測試場景,主要用以滿足功能開發(fā)不同階段需求。 3.按測試場景表征的抽象程度進(jìn)行分類,如邏輯場景、功能場景、具體場景。 4.按測試場景的應(yīng)用方式進(jìn)行分類,如仿真測試場景和場地測試場景等。 5.按測試場景所包含的要素屬性特征角度進(jìn)行分類,如結(jié)構(gòu)化道路場。

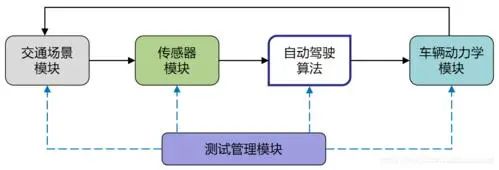
02. 測試方法 測試場景研究方法論,涉及測試場景的構(gòu)成要素分類、場景構(gòu)建方法、測試場景應(yīng)用關(guān)鍵技術(shù)等內(nèi)容。
2.1測試場景生成步驟 測試場景構(gòu)建需經(jīng)過數(shù)據(jù)采集、數(shù)據(jù)分析挖掘、場景生成等步驟,并通過虛擬仿真和物理測試技術(shù)在實(shí)際測試環(huán)境中復(fù)現(xiàn)場景。
2.2測試用例設(shè)計(jì)理論方法 設(shè)計(jì)測試用例理論方法:測試用例的設(shè)計(jì)方法有多種,常用的包括正交實(shí)驗(yàn)法、邊界值分析法、等價(jià)類劃分法、判定表法和錯誤推測。 對比測試 枚舉測試 覆蓋測試 阿拉斯加測試方法等。
2.3常見測試?yán)碚摲椒?nbsp; 正交實(shí)驗(yàn)法:正交實(shí)驗(yàn)法是一種基于正交表的測試用例設(shè)計(jì)方法。它通過選擇一組有限的測試用例,覆蓋了多個因素的不同取值組合,從而減少了測試用例的數(shù)量,提高了測試效率。
邊界值分析法:邊界值分析法是一種基于系統(tǒng)邊界的測試用例設(shè)計(jì)方法。它通過選擇系統(tǒng)輸入的邊界值和特殊值作為測試用例,以檢測系統(tǒng)在邊界情況下的行為。
等價(jià)類劃分法:等價(jià)類劃分法是一種基于輸入數(shù)據(jù)的特性進(jìn)行劃分的測試用例設(shè)計(jì)方法。它將輸入數(shù)據(jù)劃分為不同的等價(jià)類,然后選擇代表性的測試用例來覆蓋每個等價(jià)類。
判定表法:判定表法是一種基于系統(tǒng)規(guī)則的測試用例設(shè)計(jì)方法。它通過創(chuàng)建一個判定表,列出系統(tǒng)的輸入條件和對應(yīng)的輸出結(jié)果,然后根據(jù)判定表選擇測試用例。
錯誤推測法:錯誤推測法是一種基于錯誤假設(shè)的測試用例設(shè)計(jì)方法。它通過假設(shè)系統(tǒng)可能出現(xiàn)的錯誤情況,設(shè)計(jì)相應(yīng)的測試用例來驗(yàn)證系統(tǒng)的容錯能力。

03.
自動駕駛仿真測試的方向
在自動駕駛測試場景標(biāo)準(zhǔn)化過程中,實(shí)現(xiàn)不同采集平臺和技術(shù)方案的兼容性以及數(shù)據(jù)庫數(shù)據(jù)的互通共享,主要可以從以下幾個方面著手: 1.制定統(tǒng)一的數(shù)據(jù)格式標(biāo)準(zhǔn):首先,需要定義一種通用的數(shù)據(jù)交換格式或協(xié)議,如AVP(自動駕駛驗(yàn)證和驗(yàn)證)數(shù)據(jù)格式,以便各種采集設(shè)備、系統(tǒng)都能按照同一標(biāo)準(zhǔn)進(jìn)行數(shù)據(jù)輸出。這樣可以確保從不同平臺獲取的數(shù)據(jù)能夠相互理解和解析。 2.構(gòu)建標(biāo)準(zhǔn)化測試場景庫:建立包含各類基礎(chǔ)場景、特殊場景等在內(nèi)的標(biāo)準(zhǔn)化測試場景庫,并明確描述每個場景的參數(shù)指標(biāo),便于在不同的測試平臺和解決方案中復(fù)現(xiàn)并進(jìn)行驗(yàn)證。 3.建設(shè)跨平臺數(shù)據(jù)接口:開發(fā)通用的數(shù)據(jù)接入和轉(zhuǎn)換工具,支持多種數(shù)據(jù)源的接入與轉(zhuǎn)換,從而實(shí)現(xiàn)在不同平臺間的數(shù)據(jù)交互。 4.搭建數(shù)據(jù)共享平臺或數(shù)據(jù)中心:通過云服務(wù)技術(shù),建立一個安全可靠的數(shù)據(jù)存儲和共享中心,各參與方能將符合標(biāo)準(zhǔn)的數(shù)據(jù)上傳至該平臺,實(shí)現(xiàn)數(shù)據(jù)資源的匯聚和互通。 5.強(qiáng)化信息安全與隱私保護(hù):在保證數(shù)據(jù)共享的同時(shí),采取嚴(yán)格的加密、脫敏措施,確保敏感信息的安全,遵守相關(guān)的法律法規(guī)要求。 6.積極參與行業(yè)組織和聯(lián)盟:加入國內(nèi)外自動駕駛相關(guān)標(biāo)準(zhǔn)組織和產(chǎn)業(yè)聯(lián)盟,共同推動和采納行業(yè)通行的數(shù)據(jù)格式、接口規(guī)范及安全標(biāo)準(zhǔn),加速實(shí)現(xiàn)數(shù)據(jù)層面的互操作性和一致性。
04. 測試場景
服務(wù)于特定測試目的的場景則被稱為測試場景。測試場景可以幫助人們把特定的研究對象放置在具體的情況下進(jìn)行研究,考查其表現(xiàn)和反應(yīng)等,從而形成一定測試結(jié)論。對于自動駕駛汽車測試場景,其含義可以從以下幾方面進(jìn)行理解。
4.1測試場景的內(nèi)涵
場景被應(yīng)用于自動駕駛汽車測試時(shí),描述的是某類或某個行駛環(huán)境,以及被測車輛在上述行駛環(huán)境中的任務(wù)。
行駛環(huán)境描述了基本的交通環(huán)境情況和交通參與者的狀態(tài)及其行為,能夠呈現(xiàn)或反映真實(shí)世界中的交通情景的發(fā)生環(huán)境以及發(fā)生過程。
被測車輛的目標(biāo)及行為描述了被測車輛在上述行駛環(huán)境下,需要完成的任務(wù)或預(yù)期完成的任務(wù)。 上述兩部分共同組成了某個或某類特定測試場景。在測試場景中,可以對被測車輛的特定功能在行駛環(huán)境下的表現(xiàn)進(jìn)行考查和分析。
4.2測試場景的作用
測試場景用于對自動駕駛汽車的功能或性能進(jìn)行測試、驗(yàn)證或評價(jià)。應(yīng)用測試場景必須有明確的測試目的,如對車輛預(yù)期的行為、性能要求等的測試。 通過被測車輛在測試場景中的表現(xiàn),可以對車輛進(jìn)行驗(yàn)證和評價(jià)。
4.3測試場景的尺度 測試場景描述的是一定時(shí)間和空間范圍內(nèi)的交通行駛環(huán)境以及被測車輛的測試任務(wù)。
測試場景中包含動態(tài)要素,其行為反映的是一個動態(tài)過程,有一定的時(shí)間跨度;測試場景包含的所有要素是被布置在一定空間尺度的環(huán)境下的。
測試場景的時(shí)間和空間尺度的大小是依據(jù)測試任務(wù)而確定的。 對于時(shí)間尺度而言,如緊急避障場景,一般持續(xù)數(shù)秒,而對于跟車行駛場景,則可能持續(xù)數(shù)分鐘甚至數(shù)小時(shí)。對于空間尺度而言,測試場景可能包含一段道路,或者數(shù)條道路組成的路網(wǎng)。
4.4測試場景的視角
測試場景存在多種視角。 首先是研發(fā)人員或場景設(shè)計(jì)者的視角。 在該視角下,能夠獲得最為完整的場景信息,且是真實(shí)信息。該視角主要用于測試人員構(gòu)建測試場景以及測試結(jié)果的評價(jià)。
其次是被測車輛的視角。 在該視角下,場景信息是不完整的。自動駕駛汽車主要通過車載傳感器、無線通信設(shè)備等獲取周圍行駛環(huán)境和交通參與者的信息,因此這些信息的范圍有限,且存在一定誤差。該視角是車輛在實(shí)際行駛過程的視角,是分析行駛環(huán)境和駕駛?cè)蝿?wù)的重要視角。
最后是其他交通參與者的視角。 與被測車輛視角類似,該視角下的場景信息也是不完備的,從該視角出發(fā)可以對被測車輛的交通協(xié)調(diào)性等行為進(jìn)行評價(jià)。
05. 測試場景的數(shù)據(jù)來源
自動駕駛汽車測試場景,需要強(qiáng)調(diào)的是其來源應(yīng)該是一般的交通場景,自動駕駛測試場景技術(shù)發(fā)展與應(yīng)用。涵蓋城市、高速公路、鄉(xiāng)村、越野等各種交通環(huán)境。 為形成測試場景,可以通過分析和篩選已有的各類交通場景數(shù)據(jù)獲得測試場景。或者可以根據(jù)測試需求,對相關(guān)理論知識和經(jīng)驗(yàn),構(gòu)建能夠反映真實(shí)交通環(huán)境的測試場景。 06. 測試評估 自動駕駛汽車的功能開發(fā)與驗(yàn)證,形成較為完整的系統(tǒng),功能也趨于完善后,則需要對其進(jìn)行進(jìn)一步的測試與評價(jià)。形成完整的閉環(huán)。
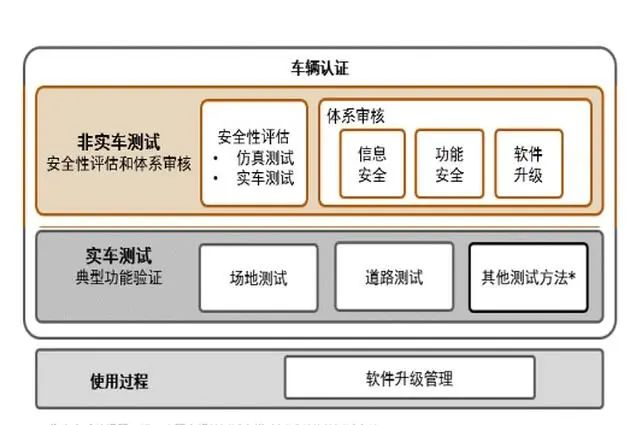
測試與評價(jià)的目的是通過車輛的表現(xiàn),對其各項(xiàng)性能進(jìn)行評估。基于測試場景的方法是進(jìn)行測試與評價(jià)的有效手段。 6.1特性場景測試 通過選取或構(gòu)建能夠體現(xiàn)車輛特定性能的場景,制定合理的測試任務(wù),可以對自動駕駛汽車的不同維度和不同方面的性能,如行駛自治性、安全性、經(jīng)濟(jì)性、舒適性、交通協(xié)調(diào)性等進(jìn)行評價(jià)。 6.2檢測與認(rèn)證 基于測試場景的檢測與認(rèn)證是非常必要的。通過選取或構(gòu)建典型測試場景,考查自動駕駛汽車在各種交通情況下的行為,對各項(xiàng)功能的安全性和可靠性等進(jìn)行檢測與認(rèn)證,可證明其是否具備在真實(shí)交通環(huán)境下應(yīng)對多種場景的能力以及規(guī)避風(fēng)險(xiǎn)的能力。
6.3測試場景需要滿足的要求
為滿足以上不同測試階段、不同測試目標(biāo)的測試需求,測試場景需要滿足以下要求: 可界定、可調(diào)整、可分解、通用性多用途、可復(fù)制、可組合、可編碼。
可量化:場景中包含的各類要素所體現(xiàn)出的特征應(yīng)是可被量化的如道路的幾何尺寸、線形特征,靜態(tài)要素的大小、位置,動態(tài)要素的初始狀態(tài)行為,環(huán)境的溫度、光照、濕度等。通過量化,可以形成測試場景具體和準(zhǔn)確表達(dá),進(jìn)而使測試場景能夠重復(fù)使用且具備一致的效果。
可執(zhí)行:測試場景應(yīng)是可執(zhí)行的,即在一定的技術(shù)基礎(chǔ)和資源條件測試場景是可實(shí)施的。測試場景中不應(yīng)包含一些難以復(fù)現(xiàn)、不可人為控制的要種類,或者現(xiàn)有技術(shù)手段難以達(dá)到的要素指標(biāo)水平,或者因測試方案存在極全風(fēng)險(xiǎn)而造成測試場景無法實(shí)施的內(nèi)容。
測試場景應(yīng)具備的特征 基于上述對測試場景的要求,所形成的測試場景一般具備以下特征。三階段測試與認(rèn)證;滿足不同測試環(huán)境的應(yīng)用需要。
可界定:對于測試場景的構(gòu)建,可以通過自然或機(jī)器語言及圖形的方式。
多用途:測試場景應(yīng)適合各種不同用途。包括滿足自動駕駛汽車上路前進(jìn)行描述和界定。不同測試場景可對自動駕駛汽車進(jìn)行多項(xiàng)性能的測試,因此需以可界定的方式對不同測試場景對應(yīng)不同測試功能或階段進(jìn)行描述和界定,使測試人員能夠準(zhǔn)確構(gòu)建相應(yīng)測試場景。
可調(diào)整:測試場景在被應(yīng)用的過程中需具備可調(diào)整性。主要表現(xiàn)在可對構(gòu)成測試場景的要素進(jìn)行調(diào)整,如對要素的數(shù)量、種類、空間位置、觸發(fā)機(jī)制、觸發(fā)時(shí)間等進(jìn)行調(diào)整。
可復(fù)制:測試場景應(yīng)是可被重復(fù)設(shè)置并使用的,即被測自動駕駛車輛應(yīng)處于可被重復(fù)使用、設(shè)置并保持相同測試條件的測試場景中。一方面,同一自動駕駛汽車被測時(shí),需要進(jìn)行多次重復(fù)測試;另一方面,對不同自動駕駛汽車的相同功能或性能指標(biāo)進(jìn)行對比測試時(shí),也需要測試場景具備高度可復(fù)制性。
可分解:測試場景可分解產(chǎn)生基元場景。測試場景反映了一定時(shí)間和空間范圍內(nèi)要素和自動駕駛車輛行為的綜合狀態(tài),可從不同角度對測試場景進(jìn)行分解。如從時(shí)間角度,可將測試場景分解為若干瞬時(shí)片段的基元場景;從空間角度,可將測試場景分解為空間尺度不同的基元場景。
可組合:不同測試場景包含的要素可進(jìn)行拆解和重組,產(chǎn)生更多場景,擴(kuò)大測試范圍,豐富測試選擇。此外,場景和場景間具備可組合性,可形成具備綜合功能的測試場景,增加測試的連貫性。
通用性:測試場景的應(yīng)用應(yīng)具備通用性。為支持測試場景的應(yīng)用,應(yīng)采用統(tǒng)一格式進(jìn)行儲存和管理。不同采集平臺和技術(shù)方案須相互兼容,實(shí)現(xiàn)不同數(shù)據(jù)庫數(shù)據(jù)互通與數(shù)據(jù)共享,從而有效節(jié)約開發(fā)和測試成本,形成更為科學(xué)合理的運(yùn)營模式,促進(jìn)測試場景的規(guī)模化應(yīng)用。
| 可界定 | 可調(diào)整 | 可分解 | 通用性 |
| 多用途 | 可復(fù)制 | 可組合 | 可編碼 |
| 需求標(biāo)準(zhǔn)+測試因素+高精度地圖+場景編輯=測試場景 |
07. 測試場景數(shù)據(jù)來源
7.1測試場景需要來源 測試場景需求來源于自動駕駛汽車的開發(fā)與驗(yàn)證、測試與評價(jià)、檢測與認(rèn)證三個階段。
7.2測試場景的階段性特點(diǎn) 每階段對測試場景的要求有所不同,測試場景的可量化性、可執(zhí)行性、擬真性和通用性等特點(diǎn)。
7.3測試場景數(shù)據(jù)基于實(shí)際交通 構(gòu)建自動駕駛汽車測試場景時(shí),數(shù)據(jù)來源應(yīng)基于實(shí)際交通場景,并涵蓋不同交通環(huán)境,通過分析篩選已有數(shù)據(jù)或理論知識構(gòu)建出真實(shí)反映交通環(huán)境的測試場景。
上一篇:汽車電機(jī)控制器組成及工作原理
下一篇:全面詳解特斯拉的FSD車道算法
推薦閱讀最新更新時(shí)間:2025-04-23 19:08

 智能網(wǎng)聯(lián)汽車產(chǎn)業(yè)鏈全景圖(可做求職參考)
智能網(wǎng)聯(lián)汽車產(chǎn)業(yè)鏈全景圖(可做求職參考) 操作系統(tǒng)真相還原
操作系統(tǒng)真相還原
- 高帶寬光學(xué)前端參考設(shè)計(jì)
- 老五1.54寸墨水屏底板(34pin墨水屏測試板)
- 使用 Semtech 的 SC4810B 的參考設(shè)計(jì)
- ZHT431 大電流并聯(lián)穩(wěn)壓器的典型應(yīng)用
- ADP2323 同步降壓穩(wěn)壓器的典型應(yīng)用,通道 2 跟蹤通道 1,VIN1 = VIN2 = 12 V,VOUT1 = 2.5 V,IOUT1 = 3 A,VOUT2 = 1.25 V,IOUT2 = 3 A,fSW = 500 kHz
- LM3481高效變壓器輝光管升壓模塊
- 使用具有引腳可配置模擬輸入范圍的 LTC2389ILX-18、18 位、2.5Msps SAR ADC 的典型應(yīng)用
- 109990013,DSO Nano v3 評估套件是一款便攜式數(shù)字存儲示波器
- 使用 Analog Devices 的 LTC6262HMS8 的參考設(shè)計(jì)
- STEVAL-ISA103V1、寬范圍(90 至 265)V 輸入、5 V、12 W 輸出演示板,具有基于 VIPER27LN 的改進(jìn)待機(jī)性能






- 特斯拉:美國交付的Model Y/3電池包已實(shí)現(xiàn)100%美國生產(chǎn)
- 地平線與博世深化合作,攜手為多家車企提供輔助駕駛產(chǎn)品
- 強(qiáng)化中國市場戰(zhàn)略布局,德州儀器正靈活應(yīng)對全球關(guān)稅挑戰(zhàn)
- Molex莫仕通過本地合作和創(chuàng)新加強(qiáng)支持中國汽車行業(yè)
- 貿(mào)澤開售Texas Instruments適用于高分辨率AR HUD的 全新DLP4620S-Q1 0.46"汽車數(shù)字微鏡器件
- ROHM推出高功率密度的新型SiC模塊,將實(shí)現(xiàn)車載充電器小型化!
- 用上車規(guī)級UFS 4.0,讓出行變得高效且可靠
- 車載測試技術(shù)解析:聚焦高帶寬、多通道同步采集與協(xié)議分析
- 傳統(tǒng)晶體管的極限!臺積電3nm N3P已量產(chǎn)
- 分析師稱H20出口管制毫無意義:對中國AI發(fā)展影響不大
- TI 高精度實(shí)驗(yàn)室信號鏈精品課大作戰(zhàn)——你學(xué)習(xí)我送禮!
- 有獎直播|TI Sitara™ 產(chǎn)品在智能電網(wǎng)中的應(yīng)用
- 參與e絡(luò)盟與 TE 傳感器的問卷活動,贏50元亞馬遜購物券!
- Nexperia ESD 應(yīng)用手冊|讀 ESD 干貨答題贏好禮
- 西門子精彩視頻限時(shí)免費(fèi)|利用電子產(chǎn)品生命周期管理 (PLM) 更快地交付更多產(chǎn)品
- 有獎直播|解鎖汽車電子黑科技 開創(chuàng)未來駕乘新境界
- 【Molex莫仕工業(yè)通訊與安全解決方案】
- 【ST板卡來了(下)】 品讀STM32實(shí)戰(zhàn)經(jīng)驗(yàn),汲取FAE經(jīng)驗(yàn)闖關(guān)去抽獎
- 中國手機(jī)市場增長乏力,蘋果能重回巔峰?
- 東芝否認(rèn)放棄芯片業(yè)務(wù)出售:目標(biāo)仍是盡快完成
- 受大客戶中興拖累? 高通展開裁員
- 誰是光達(dá)技術(shù)領(lǐng)導(dǎo)供應(yīng)商?
- Semtech推出其RClamp?低電容浪涌保護(hù)產(chǎn)品平臺的最新產(chǎn)品
- RV減速機(jī)在工業(yè)機(jī)器人傳動系統(tǒng)中的重要性
- 為什么現(xiàn)在的工業(yè)機(jī)器人技術(shù)都趨向于智能化
- 手術(shù)機(jī)器人的數(shù)字化智能化已成為了發(fā)展趨勢
- 結(jié)合自身對于特定場景的深刻理解 才能發(fā)展好智能服務(wù)機(jī)器人行業(yè)
- 中國機(jī)器人借助新能源汽車 或?qū)⒄业狡凭贮c(diǎn)所在







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號