PLC編程算法(1)
PLC中無(wú)非就是三大量:開(kāi)關(guān)量、模擬量、脈沖量。只在搞清楚三者之間的關(guān)系,你就能熟練的掌握PLC了。
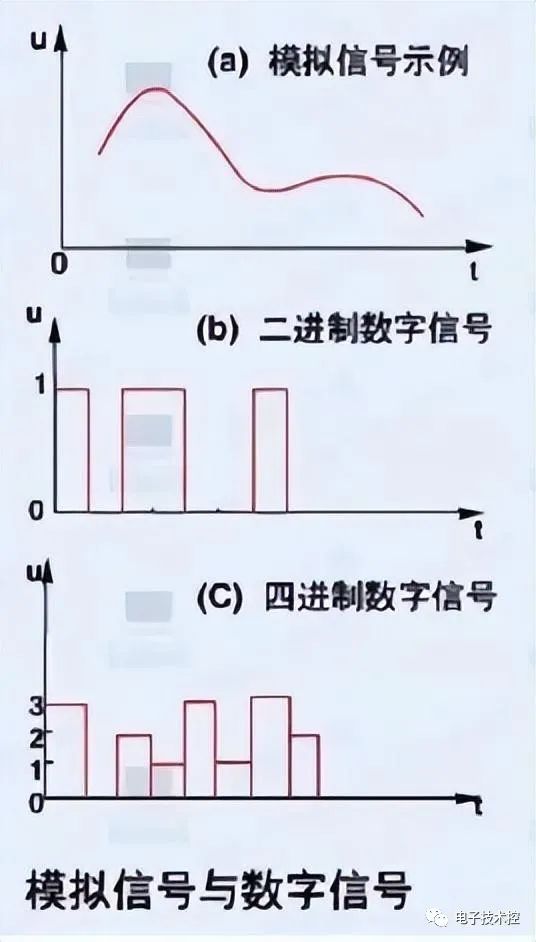
1、 開(kāi)關(guān)量也稱邏輯量,指僅有兩個(gè)取值,0或1、ON或OFF(開(kāi)關(guān)量只有兩種狀態(tài)0/1,包括開(kāi)入量和開(kāi)出量,反映的是狀態(tài))。它是最常用的控制,對(duì)它進(jìn)行控制是PLC的優(yōu)勢(shì),也是PLC最基本的應(yīng)用。

開(kāi)關(guān)量控制的目的是,根據(jù)開(kāi)關(guān)量的當(dāng)前輸入組合與歷史的輸入順序,使PLC產(chǎn)生相應(yīng)的開(kāi)關(guān)量輸出,以使系統(tǒng)能按一定的順序工作。所以,有時(shí)也稱其為順序控制。
而順序控制又分為手動(dòng)、半自動(dòng)或自動(dòng)。而采用的控制原則有分散、集中與混合控制三種。
2、 模擬量是指一些連續(xù)變化的物理量(數(shù)字量是不連續(xù)的。反映的是電量測(cè)量數(shù)值),如電壓、電流、壓力、速度、流量等。
PLC是由繼電控制引入微處理技術(shù)后發(fā)展而來(lái)的,可方便及可靠地用于開(kāi)關(guān)量控制。由于模擬量可轉(zhuǎn)換成數(shù)字量,數(shù)字量只是多位的開(kāi)關(guān)量,故經(jīng)轉(zhuǎn)換后的模擬量,PLC也完全可以可靠的進(jìn)行處理控制。
由于連續(xù)的生產(chǎn)過(guò)程常有模擬量,所以模擬量控制有時(shí)也稱過(guò)程控制。
模擬量多是非電量,而PLC只能處理數(shù)字量、電量。所有要實(shí)現(xiàn)它們之間的轉(zhuǎn)換要有傳感器,把模擬量轉(zhuǎn)換成數(shù)電量。
如果這一電量不是標(biāo)準(zhǔn)的,還要經(jīng)過(guò)變送器,把非標(biāo)準(zhǔn)的電量變成標(biāo)準(zhǔn)的電信號(hào),如4—20mA、1—5V、0—10V等等。
同時(shí)還要有模擬量輸入單元(A/D),把這些標(biāo)準(zhǔn)的電信號(hào)變換成數(shù)字信號(hào)。模擬量輸出單元(D/A),以把PLC處理后的數(shù)字量變換成模擬量——標(biāo)準(zhǔn)的電信號(hào)。
所以標(biāo)準(zhǔn)電信號(hào)、數(shù)字量之間的轉(zhuǎn)換就要用到各種運(yùn)算。這就需要搞清楚模擬量單元的分辨率以及標(biāo)準(zhǔn)的電信號(hào)。
例如:
PLC模擬單元的分辨率是1/32767,對(duì)應(yīng)的標(biāo)準(zhǔn)電量是0—10V,所要檢測(cè)的是溫度值0—100℃。那么0—32767對(duì)應(yīng)0—100℃的溫度值。然后計(jì)算出1℃所對(duì)應(yīng)的數(shù)字量是327.67。如果想把溫度值精確到0.1℃,把327.67/10即可。
模擬量控制包括:反饋控制、前饋控制、比例控制、模糊控制等。這些都是PLC內(nèi)部數(shù)字量的計(jì)算過(guò)程。
3、 脈沖量是其取值總是不斷的在0(低電平)和1(高電平)之間交替變化的數(shù)字量(在瞬間電壓或電流由某一值躍變到另一值的信號(hào)量),每秒鐘脈沖交替變化的次數(shù)稱為頻率。
PLC脈沖量的控制目的主要是位置控制、運(yùn)動(dòng)控制、軌跡控制等。例如:脈沖數(shù)在角度控制中的應(yīng)用。步進(jìn)電機(jī)驅(qū)動(dòng)器的細(xì)分是每圈10000,要求步進(jìn)電機(jī)旋轉(zhuǎn)90度。
那么所要?jiǎng)幼鞯拿}沖數(shù)值=10000/(360/90)=2500
PLC編程算法(2)——模擬量的計(jì)算
1、 -10—10V。-10V—10V的電壓時(shí),在6000分辨率時(shí)被轉(zhuǎn)換為F448—0BB8Hex(-3000—3000);12000分辨率時(shí)被轉(zhuǎn)換為E890—1770Hex(-6000—6000)。
2、 0—10V。0—10V的電壓時(shí),在12000分辨率時(shí)被轉(zhuǎn)換為0—1770Hex(0—6000);12000分辨率時(shí)被轉(zhuǎn)換為0—2EE0Hex(0—12000)。
3、 0—20mA。0—20mA的電流時(shí),在6000分辨率時(shí)被轉(zhuǎn)換為0—1770Hex(0—6000);12000分辨率時(shí)被轉(zhuǎn)換為0—2EE0Hex(0—12000)。
4、 4—20mA。4—20mA的電流時(shí),在6000分辨率時(shí)被轉(zhuǎn)換為0—1770Hex(0—6000);12000分辨率時(shí)被轉(zhuǎn)換為0—2EE0Hex(0—12000)。
以上僅做簡(jiǎn)單的介紹,不同的PLC有不同的分辨率,并且您所測(cè)量物理量實(shí)現(xiàn)的量程不一樣。計(jì)算結(jié)果可能有一定的差異。
注:模擬輸入的配線的要求
1、使用屏蔽雙絞線,但不連接屏蔽層。
2、當(dāng)一個(gè)輸入不使用的時(shí)候,將V IN 和COM端子短接。
3、模擬信號(hào)線與電源線隔離 (AC 電源線,高壓線等)。
4、當(dāng)電源線上有干擾時(shí),在輸入部分和電源單元之間安裝一個(gè)慮波器。
5、確認(rèn)正確的接線后,首先給CPU單元上電,然后再給負(fù)載上電。
6、斷電時(shí)先切斷負(fù)載的電源,然后再切斷CPU的電源。
PLC編程算法(3)——脈沖量的計(jì)算
脈沖量的控制多用于步進(jìn)電機(jī)、伺服電機(jī)的角度控制、距離控制、位置控制等。以下是以步進(jìn)電機(jī)為例來(lái)說(shuō)明各控制方式。
1、 步進(jìn)電機(jī)的角度控制。首先要明確步進(jìn)電機(jī)的細(xì)分?jǐn)?shù),然后確定步進(jìn)電機(jī)轉(zhuǎn)一圈所需要的總脈沖數(shù)。
計(jì)算“角度百分比=設(shè)定角度/360°(即一圈)”
“角度動(dòng)作脈沖數(shù)=一圈總脈沖數(shù)*角度百分比”
公式為:
角度動(dòng)作脈沖數(shù)=一圈總脈沖數(shù)*(設(shè)定角度/360°)
2、 步進(jìn)電機(jī)的距離控制。首先明確步進(jìn)電機(jī)轉(zhuǎn)一圈所需要的總脈沖數(shù)。然后確定步進(jìn)電機(jī)滾輪直徑,計(jì)算滾輪周長(zhǎng)。計(jì)算每一脈沖運(yùn)行距離。最后計(jì)算設(shè)定距離所要運(yùn)行的脈沖數(shù)。
公式為:
設(shè)定距離脈沖數(shù)=設(shè)定距離/[(滾輪直徑*3.14)/一圈總脈沖數(shù)]
3、 步進(jìn)電機(jī)的位置控制就是角度控制與距離控制的綜合。
以上只是簡(jiǎn)單的分析步進(jìn)電機(jī)的控制方式,可能與實(shí)際有出入,僅供各位同仁參考。
伺服電機(jī)的動(dòng)作與步進(jìn)電機(jī)的一樣,但要考慮伺服電機(jī)的內(nèi)部電子齒輪比與伺服電機(jī)的減速比。
上一篇:電氣電機(jī)原理動(dòng)態(tài)圖大全
下一篇: 原來(lái),這就是R型變壓器電流互感器的運(yùn)轉(zhuǎn)原理!
推薦閱讀最新更新時(shí)間:2025-04-23 18:42

 匯川中型PLC指令手冊(cè)
匯川中型PLC指令手冊(cè) 操作系統(tǒng)真相還原
操作系統(tǒng)真相還原- 何為接近開(kāi)關(guān)?如何調(diào)試接近開(kāi)關(guān)
- 影響接近開(kāi)關(guān)工作距離的因素有哪些?使用接近開(kāi)關(guān)有哪些注意事項(xiàng)
- 如何安裝接近開(kāi)關(guān)?接近開(kāi)關(guān)如何正確接線?
- 高速數(shù)據(jù)傳輸:構(gòu)建嵌入式視覺(jué)的未來(lái)
- 接近開(kāi)關(guān)有哪些功能?如何判斷接近開(kāi)關(guān)是否已經(jīng)損壞
- 接近開(kāi)關(guān)有哪些分類?接近開(kāi)關(guān)損壞的原因有哪些
- 接近開(kāi)關(guān)的常開(kāi)與常閉是怎么回事?和光電開(kāi)關(guān)有什么區(qū)別?
- 實(shí)現(xiàn)工業(yè)設(shè)備輔助電源應(yīng)用要求的高耐壓與低損耗
- 接近開(kāi)關(guān)有哪些優(yōu)缺點(diǎn)?接近開(kāi)關(guān)使用經(jīng)驗(yàn)分享

- 反向電源 - 八輸入單輸出參考設(shè)計(jì)
- ch552t硅膠鍵加波輪編碼器多媒體鍵盤
- LT8330EDDB 48V 升壓轉(zhuǎn)換器的典型應(yīng)用電路
- 使用 Analog Devices 的 ADUC7033BCPZ-8L 的參考設(shè)計(jì)
- EVAL-ADM1186-2MBZ,用于 ADM1186-2 四路電壓序列發(fā)生器和監(jiān)視器的微型評(píng)估板
- 體溫計(jì) MLX90615-STC89C52
- 具有輸出電壓監(jiān)視器的 LT1120IN8 微功率穩(wěn)壓器的典型應(yīng)用電路
- MIC2213 的典型應(yīng)用:排序的便攜式電源管理 IC
- TPA3116桌面功放
- AM6TW-4807DH35Z ±7.2V 6 瓦單輸出 DC-DC 轉(zhuǎn)換器的典型應(yīng)用






- 飛思卡爾微控制與MSCAN ----自學(xué)筆記
- 被鎖進(jìn)籠子里的汽車OTA
- 51單片機(jī) 8x8LED點(diǎn)陣屏循環(huán)顯示數(shù)字0~9
- 外媒:人腦植入芯片明年或成真 癱瘓者將為首批接受對(duì)象
- 基于模型的設(shè)計(jì)有助于促進(jìn)BMS嵌入式軟件開(kāi)發(fā)
- 半導(dǎo)體設(shè)備需求大增,華峰測(cè)控2021年凈利同比增120%
- 硅鋼片表面電阻測(cè)試儀TS1700電工鋼表面絕緣電阻測(cè)量裝置
- 基于恩智浦MPC5744P的電機(jī)FOC控制中電流的采樣
- 基于虛擬儀器技術(shù)和開(kāi)發(fā)平臺(tái)實(shí)現(xiàn)無(wú)線測(cè)控系統(tǒng)的設(shè)計(jì)
- Arm 技術(shù)加持,地平線以 HSD 及征程 6P 推動(dòng)汽車智能化變革
- 華為自動(dòng)駕駛技術(shù)解讀
- 加速電動(dòng)化轉(zhuǎn)型,邦迪汽車系統(tǒng)攜多款創(chuàng)新產(chǎn)品首秀2025上海車展
- 數(shù)據(jù)中心面臨電力約束挑戰(zhàn),推動(dòng)GenAI終端發(fā)展
- 博泰車聯(lián)網(wǎng)與高通深化合作,基于驍龍座艙平臺(tái)至尊版打造新一代智能座艙解決方案
- 凌華智能與Elma強(qiáng)強(qiáng)聯(lián)手為軌道交通及關(guān)鍵任務(wù)應(yīng)用提供高可靠加固系統(tǒng)解決方案
- 何為接近開(kāi)關(guān)?如何調(diào)試接近開(kāi)關(guān)
- 具身智能浪潮反思:中國(guó)制造業(yè)需要什么樣的協(xié)作機(jī)器人?
- 影響接近開(kāi)關(guān)工作距離的因素有哪些?使用接近開(kāi)關(guān)有哪些注意事項(xiàng)
- 如何安裝接近開(kāi)關(guān)?接近開(kāi)關(guān)如何正確接線?
- TI 高精度實(shí)驗(yàn)室信號(hào)鏈精品課大作戰(zhàn)——你學(xué)習(xí)我送禮!
- 有獎(jiǎng)直播|TI Sitara™ 產(chǎn)品在智能電網(wǎng)中的應(yīng)用
- 參與e絡(luò)盟與 TE 傳感器的問(wèn)卷活動(dòng),贏50元亞馬遜購(gòu)物券!
- Nexperia ESD 應(yīng)用手冊(cè)|讀 ESD 干貨答題贏好禮
- 西門子精彩視頻限時(shí)免費(fèi)|利用電子產(chǎn)品生命周期管理 (PLM) 更快地交付更多產(chǎn)品
- 有獎(jiǎng)直播|解鎖汽車電子黑科技 開(kāi)創(chuàng)未來(lái)駕乘新境界
- 【Molex莫仕工業(yè)通訊與安全解決方案】
- 【ST板卡來(lái)了(下)】 品讀STM32實(shí)戰(zhàn)經(jīng)驗(yàn),汲取FAE經(jīng)驗(yàn)闖關(guān)去抽獎(jiǎng)
- 適合中國(guó)的人工智能生態(tài)是什么樣的?
- 河北計(jì)劃2019年完成替代電量90億千瓦時(shí)
- 山西電力2019年一季度電網(wǎng)建設(shè)創(chuàng)新高
- 海南電網(wǎng)啟動(dòng)第一批智能項(xiàng)目前期工作
- 西北電力新能源場(chǎng)站全景監(jiān)控技術(shù)效果顯著
- 一加7T系列參數(shù)遭到曝光,繼續(xù)全系旗艦配置
- IBS:中國(guó)半導(dǎo)體市場(chǎng)將從以出口為主的模式轉(zhuǎn)為以內(nèi)銷為主
- 港交所面對(duì)倫敦交易所展開(kāi)魅力攻勢(shì)
- 搭載65W超級(jí)閃充, OPPO Reno Ace將發(fā)布
- 率先支持Android 10版本商用,紫光展銳靠的是什么?
- MSP430
- 步進(jìn)電機(jī)
- 征集英文夠好并且懂ADI產(chǎn)品之能人
- 哥們今天上傳一點(diǎn)維修MP3的資料
- FreeRTOS兩種延時(shí)函數(shù)的區(qū)別是什么?
- 母親節(jié),你的禮物準(zhǔn)備好了沒(méi)?給自己的媽媽送去祝福請(qǐng)?jiān)谶@里留言..
- 【TI首屆低功耗設(shè)計(jì)大賽】“偷電”的藍(lán)牙溫度計(jì)_Part5_算法部分
- 請(qǐng)教一個(gè)51串口通信的程序 麻煩幫滿看一下 謝謝~
- 這個(gè)穩(wěn)壓電路什么道理,求老師們幫忙分析
- C2000 Launchpad的0402電容誰(shuí)焊上去了?







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)