多速率仿真
通常情況下,在Simulink環(huán)境下搭建的電力電子控制系統(tǒng)的仿真模型,都是多速率的仿真模型。這是因為:
01
電力電子控制系統(tǒng)中包含多種類型的模型,不同模型對于仿真速率的要求是不同的。
02
被控對象模型中的電氣部分,例如永磁同步電機、逆變器,都是希望仿真速率越快越好。具體選擇多快的仿真速率,與PWM的頻率,逆變器的死區(qū)時間,模型的解算方式等因素相關(guān)。對于10kHz開關(guān)頻率,仿真速率最好是開關(guān)頻率的100倍,因此為1MHz(仿真步長1μs),但是如果死區(qū)時間為2μs,那么仿真步長最好是死區(qū)時間的1/10(0.2μs),此時仿真速率就是5MHz。
03
被控對象模型中的機械部分,通常情況下仿真步長為1ms(仿真速率1kHz),但是在電動汽車的MCU HIL中,為了測試電機的極限速率變化,可能此時電機的機械部分也需要1MHz以上的仿真速率,以保證電機位置和速率的精確模擬。
04
PWM比較器模型部分,通常情況下PWM比較器的三角波都是通過一個高頻率時鐘進行計數(shù)來產(chǎn)生的。這個時鐘一般都大于10MHz,以保證PWM輸出占空比的調(diào)節(jié)精度。
05
控制器模型部分,其仿真速率一般與開關(guān)頻率相關(guān),為開關(guān)頻率的整數(shù)倍。例如開關(guān)頻率為10kHz,那么控制器模型的仿真速率可以是10kHz或者20kHz,具體選擇10kHz還是20kHz,就與將來選擇的DSP或者Micro Controller的處理能力相關(guān)了。此外,實際應(yīng)用中,還存在變開關(guān)頻率的情況,此時控制器模型的仿真頻率也是變化的。
總之,當我們在Simulink環(huán)境下,搭建電力電子控制系統(tǒng)的仿真模型時,需要考慮電力電子系統(tǒng)的實際情況,讓仿真模型的仿真速率是與實際情況相符,這樣仿真結(jié)果才能準確反映真實的變化。
如果想要查看Simulink模型中不同模塊的仿真速率,可以點擊Simulink的左側(cè)模型的圖標,選擇Colors即可。從下圖的右側(cè)可以看到,這個模型有Continuous的部分,也有Discrete的部分(仿真步長200μs)。其他的還有Constant和Multrate(多速率)的部分。

在搭建多速率仿真模型時,不同仿真速率的仿真模型通過Simulink的Rate Transition模塊進行連接,具體的使用請參考MATLAB的Help文件。
Rate Transition模塊
同步和異步
同步和異步是一個相對的概念,例如異步中斷,同步任務(wù)等。因此需要弄清楚,相對什么是任務(wù)是同步的,相對什么中斷是異步的。還是以永磁同步電機控制系統(tǒng)的仿真模型來說明。
下圖是常規(guī)永磁同步電機控制的實際流程包括以下幾個步驟**:**
1 . 采樣和保持電機電流值,ADC轉(zhuǎn)換電機電流值;
2 . 讀取電機速度和位置值(圖中未標出);
3 . 運行電機控制和SVPWM算法;
4 . 輸出和更新PWM占空比;
其中步驟1的電流采樣和步驟4的更新PWM占空比必須在同一時刻完成的。
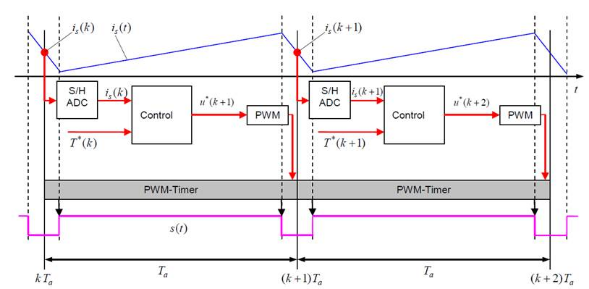
PMSM電機控制的流程
因此我們可以知道,如何把電機控制算法看作一個任務(wù),這個任務(wù)相對被控對象模型就是異步的。但是這個任務(wù)相對于PWM-Timer卻是同步的。
現(xiàn)在,我們已經(jīng)知道了永磁同步電機控制系統(tǒng)的實際情況,下面我們就來進行建模。
永磁同步電機控制系統(tǒng)仿真參數(shù)
確定系統(tǒng)參數(shù)如下:

表1 永磁同步電機控制系統(tǒng)參數(shù)
根據(jù)PWM開關(guān)頻率和PWM比較器時鐘頻率,可以確定PWM比較器的三角波底點值為0,頂點值約為833。因此確定實際的控制周期為83.3μs,在PWM比較器的三角波的地點和頂點各對永磁電機進行一次控制。
因此確定整個系統(tǒng)仿真模型的仿真參數(shù):
1 . 被控對象的仿真步長為100ns;
2 . PWM比較器的仿真步長為100ns;
3 . 控制器的仿真步長為83.3μs;
控制器仿真模型通過PWM比較器通過異步中斷的方式觸發(fā)運行。
永磁同步電機控制系統(tǒng)模型概述
為保證每個控制時刻電流采樣與PWM信號的同步,在模型搭建時可以采用Function Call子系統(tǒng)或者Enable子系統(tǒng),如下圖所示,此時PMSM Controller的運行不與時間同步,而與PWM比較器輸出的trigger同步(圖中的from模塊的INT標識)
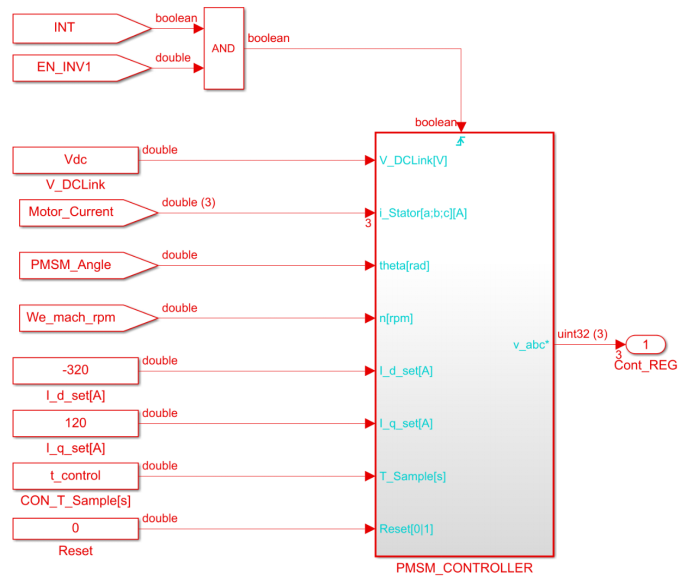
基于Function Call的PMSM控制器模型

PWM比較器產(chǎn)生控制器模型觸發(fā)信號
整個系統(tǒng)仿真模型建模完成后,點擊Simulink的左側(cè)模型的圖標,選擇Colors,查看Simulink模型中不同模塊的仿真速率。如下圖所示,其中紅色表示仿真步長為0.1μs。粉紅色表示仿真步長為constant(常值),一般為仿真模型一些Constant模塊的仿真步長。最下面青色的就是控制器模型的仿真步長為Triggered,即中斷觸發(fā)的運行方式,其中斷源來自D1(即仿真步長為0.1μs的模塊),也是就仿真步長為0.1μs的PWM比較器產(chǎn)生的。
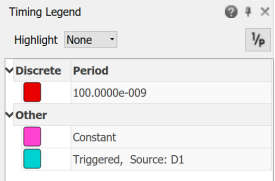
永磁同步電機控制系統(tǒng)仿真模型的仿真步長
各種模式的仿真結(jié)果
下面比較定子頻率400Hz下,兩種仿真模式下的仿真結(jié)果,讓大家明白其中的差異。
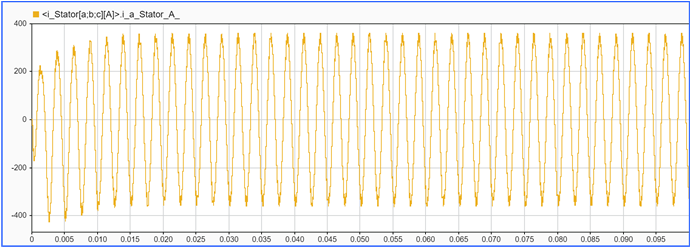
仿真模式1:控制器通過中斷觸發(fā)方式運行:電機電流波形(整體)
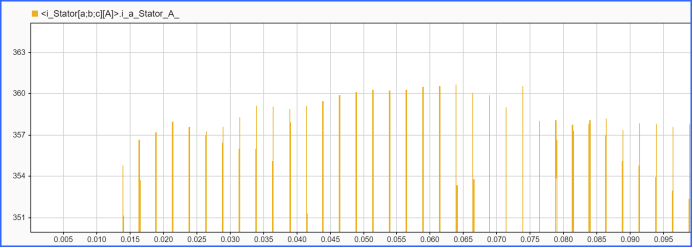
仿真模式1:控制器通過中斷觸發(fā)方式運行:電機電流波形(峰值)
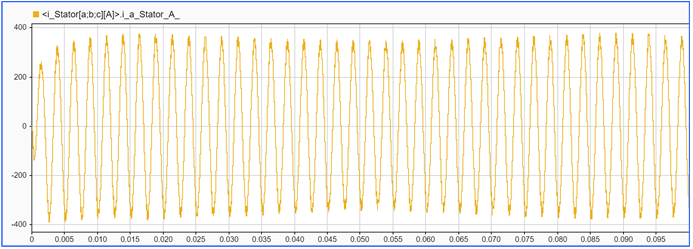
仿真模式2:控制器通過非中斷觸發(fā)方式運行:電機電流波形(整體)
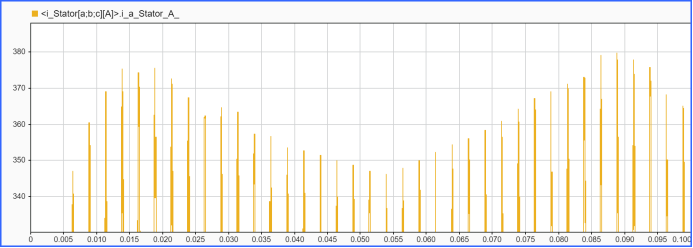
仿真模式2:控制器通過非中斷觸發(fā)方式運行:電機電流波形(峰值)
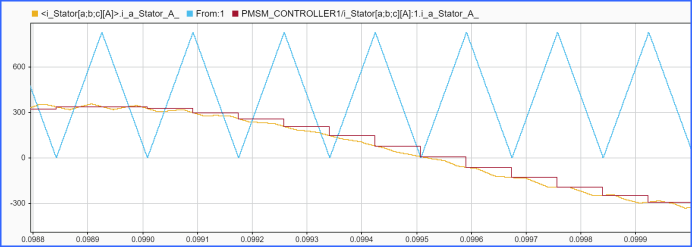
仿真模式1:控制器通過中斷觸發(fā)方式運行:電機電流波形,電機電流采樣波形,三角波
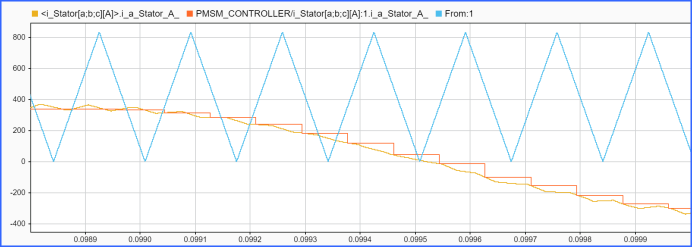
仿真模式2:控制器通過非中斷觸發(fā)方式運行:電機電流波形,電機電流采樣波形,三角波
差異如下:
采用中斷觸發(fā)方式建模和仿真,電機電流的峰值有大約3A(0.83%)的波動;
采用非中斷觸發(fā)方式建模和仿真,電機電流的峰值有35A(9.72%)的低頻波動;
采用中斷觸發(fā)方式建模和仿真,電機電流的采樣值在三角波的底點和頂點;
采用非中斷觸發(fā)方式建模和仿真,電機電流的采樣值與三角波的底點和頂點無關(guān);
如何大家觀察電機轉(zhuǎn)矩的波形可以看到更為明顯的低頻波動現(xiàn)象。
上一篇:永磁同步電機控制系統(tǒng)仿真—PWM比較器的Simulink模型
下一篇:6個經(jīng)典的PLC程序?qū)嵗?/a>
推薦閱讀最新更新時間:2025-04-23 16:58

 ffmpeg基礎(chǔ)庫編程開發(fā)_20140307
ffmpeg基礎(chǔ)庫編程開發(fā)_20140307 操作系統(tǒng)真相還原
操作系統(tǒng)真相還原- 何為接近開關(guān)?如何調(diào)試接近開關(guān)
- 影響接近開關(guān)工作距離的因素有哪些?使用接近開關(guān)有哪些注意事項
- 如何安裝接近開關(guān)?接近開關(guān)如何正確接線?
- 高速數(shù)據(jù)傳輸:構(gòu)建嵌入式視覺的未來
- 接近開關(guān)有哪些功能?如何判斷接近開關(guān)是否已經(jīng)損壞
- 接近開關(guān)有哪些分類?接近開關(guān)損壞的原因有哪些
- 接近開關(guān)的常開與常閉是怎么回事?和光電開關(guān)有什么區(qū)別?
- 實現(xiàn)工業(yè)設(shè)備輔助電源應(yīng)用要求的高耐壓與低損耗
- 接近開關(guān)有哪些優(yōu)缺點?接近開關(guān)使用經(jīng)驗分享

- 使用 Microchip Technology 的 HV732 的參考設(shè)計
- MCIMX8QXP-CPU: i.MX 8QuadXPlus多傳感器支持套件(MEK)
- TCR5SB25、200mA、2.5V 輸出電壓 CMOS 低壓降穩(wěn)壓器的典型應(yīng)用
- 老五家gigaware聲卡
- 使用 Microchip Technology 的 ATF1502AE-10JC44 的參考設(shè)計
- LTC3622HDE-2 2.5V/5V Vout 應(yīng)用的典型應(yīng)用電路,fSW = 1MHz 同步降壓穩(wěn)壓器
- ADR550 高精度并聯(lián)模式電壓基準的典型應(yīng)用
- esp32充電開發(fā)板
- AD10226/PCB,用于評估 AD10226 雙通道、125 MSPS IF 采樣 ADC 的評估板
- LD29150DT33R 1.5A超低壓降穩(wěn)壓器典型應(yīng)用電路






- 強強聯(lián)合再進階!理想AD Pro輔助駕駛正式升級搭載地平線征程6M
- 英特爾與黑芝麻智能簽署合作備忘錄,聯(lián)合發(fā)布艙駕融合平臺
- 英特爾與面壁智能宣布建立戰(zhàn)略合作伙伴關(guān)系,共同研發(fā)端側(cè)原生智能座艙
- 芯馳科技發(fā)布X10,打造全民AI時代座艙處理器新標桿
- 精準適配,輕裝全能!芯馳發(fā)布E3系列高端智控MCU三大應(yīng)用場景
- 場景定義、精準創(chuàng)「芯」,芯馳全新發(fā)布AI座艙處理器和高端智控系列
- Arm 技術(shù)加持,地平線以 HSD 及征程 6P 推動汽車智能化變革
- 華為自動駕駛技術(shù)解讀
- 加速電動化轉(zhuǎn)型,邦迪汽車系統(tǒng)攜多款創(chuàng)新產(chǎn)品首秀2025上海車展
- 數(shù)據(jù)中心面臨電力約束挑戰(zhàn),推動GenAI終端發(fā)展
- 谷歌最新的一項研究可讓機器狗小跑起來成為可能
- 機器人可以緩解員工不足的現(xiàn)象嗎
- 新型泡沫噴射機器人可幫助消防員進行遠程救火
- 醫(yī)療機器人前程似錦,但有些問題仍需解決
- 本田推出全新智能充電解決方案 每年可為用戶節(jié)省475英磅
- 價格749元起,蘋果詳解HomePod mini全新配色
- 三星Galaxy S22系列貼膜:四邊等寬
- 蘋果推Apple Music聲控方案:專為Siri設(shè)計,每月5元人民幣
- vivo S10e發(fā)布:搭聯(lián)發(fā)科天璣900,前置32MP鏡頭
- 京東方:訂單飽滿,從中長期看顯示產(chǎn)業(yè)新增產(chǎn)能釋放







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號