** 最大轉矩電流比 **
最大轉矩電流比(Maximum Torque per Ampere,MTPA)就是一種電機在不同的轉速和轉矩給定下,確定d軸電流和q軸電流給定值的方法,以保證電機的效率處于最優狀態。
實際應用時有兩種,一種是解析法,另一種是Look Up Table法。由于永磁同步電機參數的非線性,解析法在工程上不實用,但有助于理解和分析。Look Up Table法通過標定將解析方程和非線性參數轉化為Look Up Table,更為實用和簡單。
當永磁同步電機工作在線性調制區,且主要損耗為銅損耗時,MTPA點與最優效率點近似相等。在實際工程中,永磁同步電機不僅存在銅損耗,還存在鐵損、渦流損耗、機械損耗等,特別是在六階梯波模式下,鐵損可能成為永磁同步電機的主要損耗,MTPA點不等于最優效率點。由于設計參數和實際參數的差異,通過標定最終確定d軸電流和q軸電流給定值。
根據

給定

得到

在給定的定子電流絕對值下的最大轉矩可以通過以下公式找到

得到

因為 90° ≤ β ≤ 180° , -1 ≤ cosβ ≤ 0



將 ,
, 代入
代入 ,得到
,得到 ,因為方程非常復雜,所以用MATLAB等數值工具求解。
,因為方程非常復雜,所以用MATLAB等數值工具求解。
當永磁同步電機轉速升高時,反電勢也隨之升高,但逆變器的輸出電壓受到限制。根據永磁同步電機穩態模型方程:

忽略定子電阻壓降,考慮電流限值和電壓限值

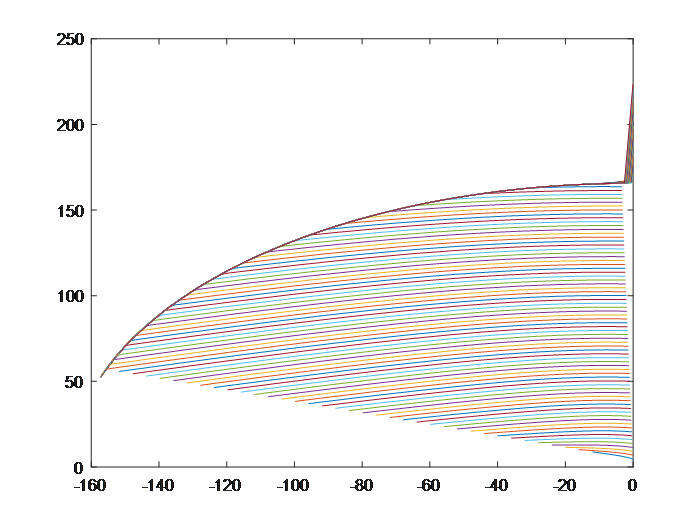
如下圖所示[1],作為設定點的,必須在電流極限圓和電壓極限圓內,隨著速度升高,電壓極限圓會收縮。

不同條件下的電流極限圓和電壓極限圓
** MTPA的數值解法 **
利用MTPA的思想計算PMSM的MAP,計算步驟如下:
1.讀入電機參數: ,
, ,
, ,
, ,極對數
,極對數 ,電流極限值
,電流極限值 ,電壓極限值
,電壓極限值 ,電機轉速極限值
,電機轉速極限值 ,功率極限值
,功率極限值 。
。
電機轉速從0按照一定步長增加至
 。
。計算MTPA轉矩點:
· 電機電流從 按照一定步長增加至
按照一定步長增加至 。
。
· 電機電流角從90°按照一定步長增加至180°。
· 根據電壓和轉矩方程,計算,, ,
, ,
, ,找出轉矩
,找出轉矩 最大的點。
最大的點。
記錄和計算:
 ,,,
,,, ,,
,, ,
, ,電子電壓
,電子電壓 ,輸入功率
,輸入功率 ,輸出功率
,輸出功率 ,功率因素
,功率因素 ,效率
,效率 。
。濾除掉不滿足電壓限制、功率限制等的結果。
計算結果如下:

x軸: 轉速(Hz); y軸: 定子電壓, 定子電流,轉矩,功率 (電動工況)

X軸:d軸電流,Y軸:q軸電流(電動工況)
X軸:d軸電壓,Y軸:q軸電壓(電動工況)

x軸: 轉速(Hz); y軸: 定子電壓, 定子電流,轉矩,功率 (發電工況)

X軸:d軸電流,Y軸:q軸電流(發電工況)

X軸:d軸電壓,Y軸:q軸電壓(發電工況)
上一篇:永磁同步電機控制系統仿真—逆變器的死區補償
下一篇:FOC控制算法的Simulink模型
推薦閱讀最新更新時間:2025-04-16 19:47

 Cheetah-Software-master四足機器人源碼(麻省理工)
Cheetah-Software-master四足機器人源碼(麻省理工) 集散控制系統及現場總線
集散控制系統及現場總線 stm32中的多路pwm例程
stm32中的多路pwm例程





- FICO-44驅動器
- 使用 Analog Devices 的 LTC6560IUD#PBF 的參考設計
- 【已驗證】OpenMV 4 Plus
- LT1170HVCQ、-12/5A 正負降壓-升壓轉換器的典型應用
- LTC2945CMS 電源監控在 -48V 系統中使用低側檢測的典型應用
- DK-DEV-4SGX230NES,Stratix IV GX FPGA 開發板為低功耗開發和原型設計提供硬件平臺
- NCP300HSN27T1 2.7V 電壓檢測器的典型應用,用于具有附加遲滯的微處理器復位電路
- 智能、炫酷的音樂花形燈
- OP295GSZ 單電源差分揚聲器驅動器的典型應用
- ADA4505-4ARUZ 脈搏血氧儀紅色和紅外電流源的典型應用電路,使用電壓基準器件的緩沖器






- 英特爾攜海信發布端側會議領域垂域模型解決方案,讓商務會議更安全更智能
- 英特爾攜手MAXHUB聯合發布企業級AI PC, 加速AI大模型在端側落地
- 助力低碳數字未來 英飛凌攜多款創新成果亮相2025慕尼黑上海電子展
- ?日清紡微電子科技賦能產業升級,亮相慕尼黑上海電子展
- 泰克閃耀 2025 慕尼黑上海電子展,引領測試技術新變革
- 破局AI眼鏡性能、續航、成本“不可能三角”:芯原推出高集成度參考設計方案
- 人形機器人成下一風口,各大車企紛紛入局,比智能汽車潛力更大?
- 業績最高 TDK為汽車應用推出電容值達100V的MLCC
- 微型柔性機器人:開啟智能救援與精準醫療新紀元
- 人工智能加速芯片設計:動態自適應流程引領高效創新
- 電源技術專輯第1期:快充參考設計大集合!
- ADI有獎下載活動之12 ADI基于視覺的占用檢測解決方案
- 直播已結束【通過集成隔離數據和電源 IC 降低輻射】
- 有獎學習 | Multi-Die系統的設計和驗證很難嗎?教你輕松“拿捏”
- 下載有禮|精華課件匯編:泰克半導體器件的表征及可靠性研究交流會暨吉時利測試測量年度研討會
- 有獎直播:基于GaN 的高頻(1.2MHz)高效率 1.6kW 高密度臨界模式 (CrM) 圖騰柱功率因數校正 (PFC)轉換器的應用介紹
- 【EEWORLD第二十六屆】2011年05月社區明星人物揭曉!
- TI MCU 推新了!八月直播揭秘新特性~報名觀看贏好禮!
- DIY數字示波器 V1.0







 京公網安備 11010802033920號
京公網安備 11010802033920號