

伴隨著人類進入人工智能時代,一種機器「深度學習」的概念邁入一個新發展階梯。
而當人工智能賦予汽車時,也正引發一場改變人類出行的新革命。
當前以特斯拉為首的智能駕駛梯隊以視覺方案作為感知主力,憑借單目、三目視覺方案,利用深度學習算法,來賦予機器“眼睛”。
通過不斷學習對物體進行分類、構建視覺特征,實現“不依賴性”的環境檢測,賦予機器人理解周遭事物環境的能力。
而國內的智能駕駛發展正推向另一個風潮。

以激光雷達為代表的感知方案入列,國內霎時間爆發出一個激光雷達上車的關鍵節點。
讓馬斯克所意料不到的是,如摩爾定律所反應的,智能駕駛的傳感器、處理芯片、算法等達到一個成熟且具規模化的爆發期。
小鵬與 Livox 、蔚來與圖達通、上汽與 Lumanar 、北汽與華為等就是最為典型的案例。
一、為何激光雷達成為當前感知的「必須項」?
與數碼相機的工作原理不同,數碼相機是將三維視覺空間拆分為二維像素矩陣。
而激光雷達則是向周圍散射出強烈的脈沖激光,測算出光束反射回來所用的時間,然后根據激光測距原理計算并建立周圍環境的三維數字模型。
在三維信息下,感知層能與計算結合最終獲得距離、物體形狀、姿態、速度等關鍵信息。
激光雷達上車也就類似于在視覺基礎上拿了一把“尺子”,「邊看邊量」著走。
而純視覺方案則需要憑借龐大的 AI 體系,需仿真人類「看完思考」決定往哪走,而這個過程也需建立在快速響應的決策以及準確性上。
另外,這個「思考」完全取決于過去構建的「學習」體系。
視覺方案中物體必須識別后「思考」匹配的動作。雖然攝像頭硬件成本降低,但其需要背靠強大的樣本數量采集以及算力支持。此外攝像頭本身在距離檢測、極端環境下也都存在局限性。
而深度學習需要強依賴于數據的廣度與深度,至少從當前來說,「寒武紀時代」才迎來爆發期,“視覺進化”的能力尚處于最初期。
在不討論 AI 視覺體系的可行性下,當前對于處于「成長期」采集階段而言,勢必會漏檢的行為,而這將會被「思考」直接過濾,后果不堪設想。
正如馬斯克曾言把機器學習系統做到 99% 的準確率非常簡單,但在這個基礎上提升 0.99999% 是非常困難的,而后者才是問題的本質。
二、激光雷達是如何實現「邊走邊量」的呢?
激光雷光雷達工作路徑是由激光發射、接收、計算以及掃描系統系統組成。
1、激光雷達測距
激光雷達通過二極管發射出紅外脈沖光,并利用計時器記錄時間,脈沖光照射到物體表面后發射回光束,激光雷達內的接收器接收并記錄,最終計算出距離。
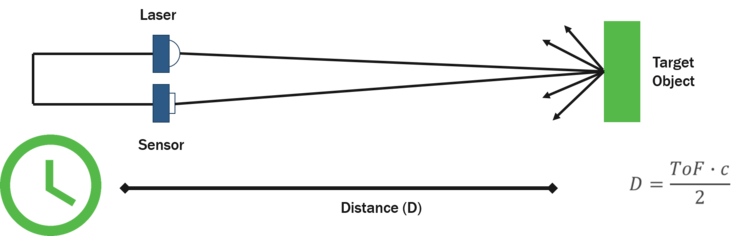
目前主流方案為飛行時間法,而另一 FMCW 方案則憑借低功率、測量速度信息等成為新秀,目前后者相比前者還具備較強的抗干擾能力。
但礙于部分高性能元器件的成本,仍處于起步階段,但長期來看兩種方法將并存。
另外激光雷達的探測距離與目標的反射率相關。目標的反射率越高則測量的距離越遠,目標的反射率越低則測量的距離越近。
探測距離越遠則能夠識別識別更遠的物體,也能夠給予決策更長的時間。
2、點云信息
激光雷達「單個/多個」發射器掃描后所產生的信息,會形成「一條線/多線」,這就是「單線/多線」激光雷達的由來。
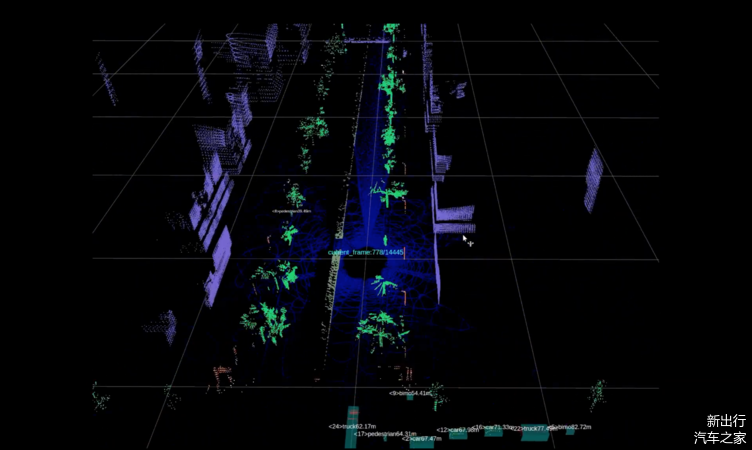
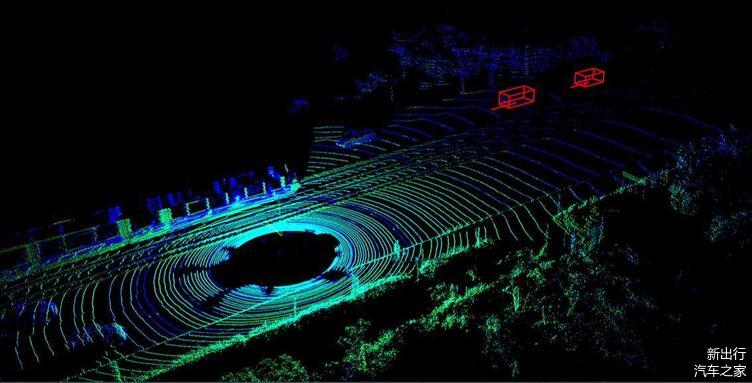
而激光雷達能夠在一秒內發射可達百萬級的脈沖光,在掃描后形成分布的點就是我們熟知的點云。從點云數據我們可以看到,每一個點都包含了三維坐標信息。
當前主流的 32 線、64 線、128 線以及 300 線的激光雷達產品,多線激光雷達能夠對縱向密度覆蓋,物體表面輪廓描繪精度越高,能實現不同級別的清晰度表現能力。
此外通過對路上的合法 3D 點云數據的采集信息,也需要對數據進行標定與解析,例如對點云障礙物識別、點云語義分割以及與攝像頭融合等,隨后利用點云信息進行存儲、管理以及靈活調用以及定義。
例如高線數有更高的縱線角度分辨率,實現更高的清晰度,點云數量也會更為密集,也利于構建感興趣區域 ROI(region of interest),通過訓練點云特征對探測,可以對障礙物、道路、橋梁等特征和對象進行分類和提取,增強感知。
3、類混合固態迎來前裝量產前夜 固態成未來主流
機械式激光雷達已發展到較為成熟的階段,但目前主要應用在于高階自動駕駛以及測繪領域。
而從短期來看,類混合固態發展將迎來前裝量產的爆發期。
目前 MEMS、轉鏡等都成為類混合固態的主要技術路線,并且相對較為成熟。其中轉鏡式較早通過車規,也成為當前最早上車的最佳方案。
轉鏡式是利用電機帶動轉鏡運動并將光束反射至空間的一定范圍,從而實現掃描探測,而收發模塊不動,無需多次校準,其當前能夠實現較長距、角度大、成本低的優勢。
但其需要應對高功耗等帶來的穩定性問題。
當前另一派廠商也正在布局 MEMS 微振鏡式方案,其主要通過高速振動的二維振鏡來實現掃描測量。
由于它的集成與成熟度較高,取消了激光器等器件能夠帶來小尺寸、高分辨率、高集成、低成本等優勢。但其收光孔徑非常小,其受限于探測距離、視場角度以及信噪比等。
而作為無任何機械器件的固態激光雷達則將成為未來的主流方向。
目前有 OPA 光學相控陣技術、Flash 兩大主流方向。
前者利用利用相干原理,實現發射光束的偏轉,從而完成掃描測量,后者則是通過時間順序對不同視場的收單元實現掃描,并利用探測器完成圖像繪制。
純固態式激光雷達具掃描效率高、穩定性好、精度高、體積小等特點被認為是是未來激光雷達的主流方向,相信解決技術難題是時間難題。
三、拿著「尺子」上車的 P5,能夠實現什么?
作為首款量產激光雷達的車型,P5 則引來眾多思考。
在激光雷達上車后,能夠為 P5 帶來什么呢?

1、結合視覺感知,實現「測距」能力。
在布局方式上,車企對于需求以及目的的不同,對于激光雷達的布局方案以及性能參數也會不同。據小鵬透露其將在今年第四季度實現城市 NGP ,而激光雷達則成為感知的重要之“眼”。
但當前,P5遵循視覺與雷達等多種傳感器相互配合的感知方案,以實際路況進行算法調整。
P5 搭載的是大疆孵化的 Livox 旗下的 HAP(Horizon Automotive Platform),這也是前裝后的正式命名。

HAP 采用的是轉鏡的方案,性能上對 10% 低反射率目標物下實現探測距離 150 米、擁有等效 144 線點云密度以及采用 905nm 激光。
另外橫向 FOV 擁有橫向 120°,在雙激光雷達加持下可以達到最高 150° ,以及可以實現以及 0.16°角分辨率。
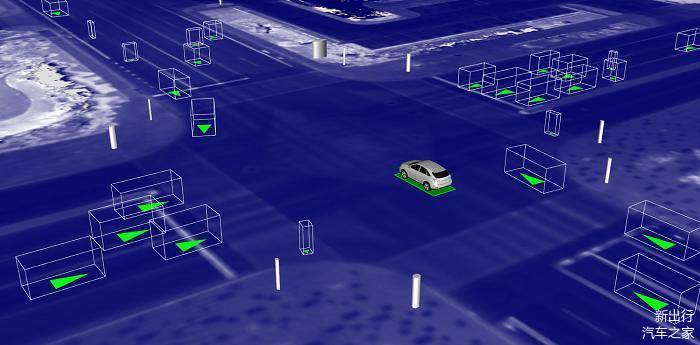
而此次搭載與底部兩側也將能夠實現厘米級的測距能力,150° 能夠帶來更廣的探測區域,配合視覺感知硬件能夠更為精準分析動靜態物體、低反射率目標等。
例如對行人、小物體以及在黑夜、逆光等環境下增強感知,與攝像頭相互冗余,應對更為復雜的中國路況。
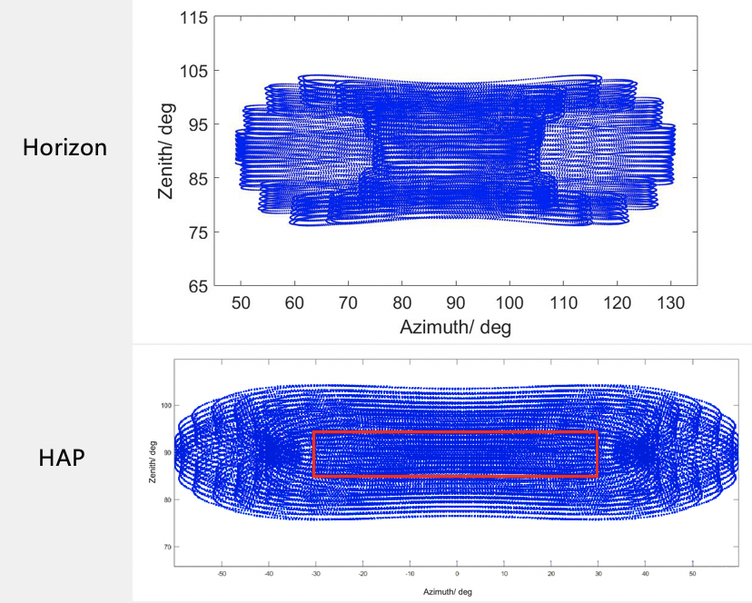
2、 HAP 獨特的“花瓣式”掃描 構建 ROI
而 HAP 特殊的地方是采取了三棱鏡掃描器。
三棱鏡也就意味著需要三個電機協同工作,其中兩個棱鏡的轉速較快,另外棱鏡可以同軸獨立旋轉,光束可實現大角度偏轉,并且可以通過棱鏡的角度差來實現不同的掃描效果。
Livox 最為經典的花瓣式點云,配合 HAP 的雙激光雷達組合以及實現中央高刷新率 20Hz(5毫秒刷新一次),時間迭代中央點云信息密度越密集,而花瓣式的效果類似于人眼的視覺,能夠完美構建起 「ROI」。
提升“集中力”,實現探測的「最大值」,以此降低「功率消耗」。
在識別車輛上,視覺感知系統所遇到一個「棘手」問題并不是「識別」,而是應對行人、車輛等具體類別的「分類」,特別是基于「中國的復雜場景」。
而「城市」相比「高速」場景下更為復雜,例如十字路口、障礙物、轉彎、環島、低速等多元復雜場景。
而如何分攤視覺算法的壓力以及避免激光雷達的注意力分散呢?
P5 利用激光雷達 ROI 集中在一定范圍的區域,并在高速與城市路況下,增強對行人、寵物等微小物體的識別,以此來應對緩慢加塞、道路異物的動靜態識別等,并基于此也需要做相應的預判與決策。
相反,基于視覺訓練場景下,龐大且復雜的道路環境,僅僅依賴「機器學習」來解決復雜的道路場景當前依舊是一個不現實問題。
而在機器學習實現革命性突破之前,利用激光雷達之「眼」解決感知難題成為當前最佳的方案。
3、實現高精地位
P5 同樣利用「尺子」來提升高精定位能力。
在步入更為高階的輔助駕駛領域,在視覺圖像中分析后完成「道路分割」以及「高精定位」是重點也是難點。

前者基于高級駕駛輔助地圖來提升道路信息解析能力,最終降低算力負擔。例如我們在 NOA 與 NGP 對比場景下遇到的國內復雜的車道線、限速信息、隧道以及復雜匝道等,高級輔助駕駛地圖顯然能夠帶來更為穩定的表現。
而亞米級的高精定位則直接影響了整個行車安全。
所以通過 GNSS、IMU 和輪速等感知硬件為初始定位,并利用激光雷達的點云信息對特征進行捕捉匹配,結合初始位置獲得全局坐標系下精準定位。
當前利用 GNSS/IMU、高級輔助駕駛地圖及傳感器的融合是未來實現精確定位的理想方案。
四、總結
與特斯拉不同的是,國內車企正享受著智能駕駛硬件紅利,而在基于中國特殊的環境下,車企也從利用激光雷達的感知方案中獲得很多的基礎信息,最終來輔佐整個感知體系。
而特斯拉通過自研芯片、開發超算 Dojo 以及打通機器學習閉環,特斯拉正在視覺方向上“一路狂奔”。而國內的智能駕駛團隊正高舉激光雷達的前裝成熟期彎道超車,這一場技術較量也逐步迎來「正面對決」。
上一篇:汽車MCU缺貨與保供 芯旺微如何布局車規級MCU
下一篇:Innoviz推出高性能激光雷達傳感器 性能提升30倍成本降低70%
推薦閱讀
史海拾趣
ADATA科技成立于2001年,是一家專注于提供存儲解決方案的公司,以下是該公司發展的五個相關故事:
公司成立與初期發展: ADATA科技成立于2001年,總部位于臺灣新北市,最初致力于生產和銷售DRAM模塊。隨著存儲技術的不斷發展,公司逐漸擴展了業務范圍,涵蓋了閃存產品、固態硬盤、移動存儲設備等多個領域。
技術創新與產品推出: ADATA科技在存儲領域進行了持續的技術創新,并推出了一系列具有競爭力的產品。公司不斷提升產品性能、降低成本,并注重產品的設計和用戶體驗。除了傳統的DRAM模塊,公司還推出了閃存卡、固態硬盤、移動硬盤等產品,滿足了不同客戶和市場的需求。
市場拓展與國際化發展: ADATA科技積極拓展國內外市場,并逐步實現了國際化發展。公司產品遠銷全球各地,與全球范圍內的主要零售商、電子產品制造商建立了合作關系。通過與合作伙伴的緊密合作,公司產品在國際市場上得到了廣泛認可和好評。
品牌建設與市場影響力: ADATA科技通過持續的品牌建設活動,不斷提升了在存儲領域的市場影響力。公司參加各類行業展會、展示活動,并投入大量資源進行市場推廣和宣傳。同時,公司還與體育、文化等領域開展贊助活動,提升品牌知名度和美譽度。
未來展望與持續發展: 作為一家專注于存儲解決方案的企業,ADATA科技將繼續致力于技術創新和產品開發。公司將不斷改進現有產品,推出更多性能更好、功能更豐富的存儲產品,以滿足不斷變化的市場需求。同時,公司還將繼續拓展國際市場,加強與合作伙伴的合作,實現業務的持續增長和發展。
作為一家專注于顯示芯片設計的企業,集創北方始終將技術創新作為核心競爭力。從早期的LED驅動芯片到后來的AMOLED驅動芯片,再到國內率先推出的TDDI芯片ICNL9920,集創北方不斷推出具有競爭力的產品,滿足了市場對于高質量顯示芯片的需求。
DLP科技,一家以DLP技術為核心的創新設計公司,在電子行業的快速發展中嶄露頭角。公司創始人李博士,憑借對DLP技術的深入研究和獨到見解,帶領團隊開發出了一系列具有革命性的產品。從最初的DLP投影機到后來的無屏電視,DLP科技不斷突破技術瓶頸,引領市場潮流。通過持續的創新和研發,DLP科技在電子行業樹立了技術領先的地位。
隨著市場需求的不斷增長,CDI-DIODE公司意識到單憑自身力量難以滿足所有客戶的需求。于是,公司積極尋求與其他企業的合作,通過共同研發、生產和銷售,實現了業務的快速拓展。這種合作模式不僅提升了公司的產能和效率,也加強了與合作伙伴之間的緊密聯系。
在激烈的市場競爭中,ELDECO公司始終堅持質量至上的原則。公司建立了嚴格的質量管理體系和檢測機制,確保每一臺出廠的ELD產品都符合高質量標準。同時,公司還注重售后服務體系建設,為客戶提供及時、專業的技術支持和解決方案。正是憑借過硬的產品質量和優質的售后服務,ELDECO公司的ELD產品贏得了客戶的廣泛認可和信賴。
隨著技術的不斷進步,Catalyst / ON Semiconductor公司逐漸在半導體領域取得了重要的技術突破。公司投入大量資源進行研發,成功開發出了一系列高性能、低功耗的半導體產品,這些產品在市場上受到了廣泛的歡迎。這些技術突破不僅提升了公司的市場競爭力,也為整個電子行業的發展注入了新的活力。
|
在電信和其它使用高電壓負電源軌的場合,可將一個儀表放大器與獨立元件簡單結合,實現大電流檢測以保護電路。高端大電流檢測放大器(CSA)主要用于正電源軌電流監測。然而,諸如ISDN和電信電源類應用需要采用工作在負電源軌的CSA。設計負電源軌CSA ...… 查看全部問答∨ |
|
|
我們的開發板上的wifi模塊突然就搜索不到網絡 不知道是什么原因 是模塊壞了嗎 但是開發板是可以發現硬件 就是搜索不到網絡啊 搜不到AP 我將wifi上PDn管腳置低了 想讓他休眠 就進行了這個操作,沒改其他的。剛剛還可以搜索 ,突然就 ...… 查看全部問答∨ |
|
|
我在一幅圖上寫字時,發現ExtTextOutW可以寫出字,而DrawText不能寫出,我試過不是rect的問題,但是現在問題已解決,而我還沒弄懂,請高手來講講。 //this is ok m_stpic.GetDC()->ExtTextOutW(m_rect.left,m_rect.top,ETO_OPAQUE | ETO_CLIPPE ...… 查看全部問答∨ |
為什么目前市面上的2440開發板裝的WINCE上不了像SHOU、163這樣的網站? 為什么目前市面上的2440開發板裝的WINCE上不了像SHOU、163這樣的網站? 一登錄這樣的網站,就退出IE! 是普通的64M內存不夠嗎? 如果是這樣,擴充內存到128以上能滿足使用嗎? 不知道哪位大俠有否遇到同樣問題?… 查看全部問答∨ |
|
請問現在做驅動開發, 是用DDK好還是用WDK好呢? 因為我是新手,希望選一個從長遠上看,較好的出發點。 沒有說哪種技術不好的意思 呵呵, 望高人指點 謝謝… 查看全部問答∨ |
win32下GDI程序運行時提示:找不到xxx(它的某一個組件)請確認..... 如題...不曉得是不是少加了什么庫文件.我程序中引用了mfc的類庫,請給一個具體的解決方案。能行的通的。… 查看全部問答∨ |
|
公司最近要做一個u盤監控的軟件,聽別人說可以寫一個驅動程序,說可以攔截IRP包,通過那個來監控u盤讀寫操作的,以前俺是寫c++的 驅動沒寫過,剛才看了一些資料,問一下,IRP包攔截后,能得到具體對u盤里那個文件讀寫操作了嗎?我在IRP_ ...… 查看全部問答∨ |

- 高通攜手中國“汽車朋友圈”亮相2025上海車展: 加速駕駛輔助普惠,推動艙駕創新升級
- 特斯拉:美國交付的Model Y/3電池包已實現100%美國生產
- 地平線與博世深化合作,攜手為多家車企提供輔助駕駛產品
- Molex莫仕通過本地合作和創新加強支持中國汽車行業
- 貿澤開售Texas Instruments適用于高分辨率AR HUD的 全新DLP4620S-Q1 0.46"汽車數字微鏡器件
- 用上車規級UFS 4.0,讓出行變得高效且可靠
- 車載測試技術解析:聚焦高帶寬、多通道同步采集與協議分析
- 汽車顯示屏——第2部分:TFT LCD、OLED和micro-LED顯示屏電源技術
- 拆解7kW的家用汽車充電樁:工程設計很復雜






 SRMP49-18-70.0M-TR
SRMP49-18-70.0M-TR- 高通攜手中國“汽車朋友圈”亮相2025上海車展: 加速駕駛輔助普惠,推動艙駕創新升級
- 工業市場正在快速回暖,德州儀器如何重塑電力電子市場?
- 特斯拉:美國交付的Model Y/3電池包已實現100%美國生產
- 地平線與博世深化合作,攜手為多家車企提供輔助駕駛產品
- 強化中國市場戰略布局,德州儀器正靈活應對全球關稅挑戰
- Molex莫仕通過本地合作和創新加強支持中國汽車行業
- 貿澤開售Texas Instruments適用于高分辨率AR HUD的 全新DLP4620S-Q1 0.46"汽車數字微鏡器件
- ROHM推出高功率密度的新型SiC模塊,將實現車載充電器小型化!
- 用上車規級UFS 4.0,讓出行變得高效且可靠
- 車載測試技術解析:聚焦高帶寬、多通道同步采集與協議分析







 京公網安備 11010802033920號
京公網安備 11010802033920號