

昨天晚上深圳市大運中心的屏幕上先后出現了英偉達創始人、CEO 黃仁勛、Luminar 創始人兼總裁 Austin Russell、采埃孚集團董事會成員 Dr.Holger Klein 等多位重量級大佬。
大佬們也都在視頻中明確表示,會用自己的產品來給上汽 R-TECH 賦能。
而昨天晚上這個會場的核心主題就是 R-TECH。
你可以簡單粗暴地把 R-TECH 理解為上汽 R 汽車的科技日,黃仁勛、Austin Russell 的出現也奠定了這場發布會硬核的基礎。從這場硬核的發布會上,我們得以深度了解上汽接下來技術規劃。

自動駕駛是這個時代的風口,無論是自動駕駛公司還是新老車企,都希望能夠在自動駕駛領域擁有自己的一席之地。
R-TECH 最核心的是 PP-CEM 全棧自研高階自動駕駛方案,這也是上汽面向自動駕駛時代交出的答卷。

PP-CEM 的感知能力由以下 6 個方面組成:
1 顆 Luminar 1550 納米激光雷達
2 顆 4D 成像雷達 + 6 顆長距點云雷達
12 顆感知攝像頭
12 顆超聲波雷達
5G-V2X
高精地圖
明年下半年正式上市的新車 ES33 也將成為上汽首款搭載 PP-CEM 全棧自研高階自動駕駛方案的車型。

PP-CEM 如此豐富的感知硬件,唯一的目的是不放過路面上每一個細小的物體。
雖然去年一波又一波的發布會已經帶領極客用戶們完成了自動駕駛硬件從小白到入門的過程,但是昨晚上汽提出的 4D 成像雷達仍然超出了很多人的認知。
4D 毫米波雷達能用來干嘛?
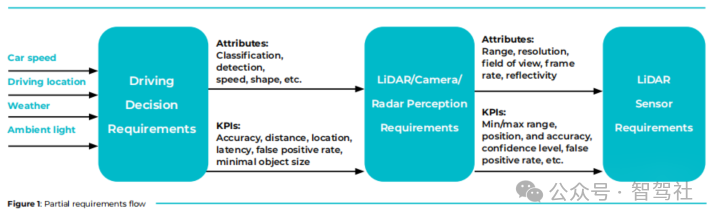
ES33 搭載的 4D 毫米波雷達來自采埃孚,這款雷達在采埃孚的官網已經有了展示,根據采埃孚官網的描述,可以知道這款 4D 毫米波雷達的優勢如下:
擁有 192 個通道,能夠實現 300 米的高度詳細物體檢測;
支持與其他傳感器技術融合,包括攝像頭、激光雷達;
可以檢測到 80 米內的小物體,如磚塊、自行車。
普通 ADAS 前向毫米波雷達能做到 8 到 16 通道,采埃孚的 4D 毫米波雷達是普通雷達是普通雷達的 12 倍,這意味著 4D 毫米波雷達返回的點更多,擁有更高的分辨率。
舉個例子,同樣距離普通雷達探測到前方 200 米的障礙物,返回 1 個點,根據這個信息,系統只能判斷前方 200 米有障礙物,但是 4D 毫米波雷達可以返回 12 個點,根據這些點的形狀排布,結合算法就能更能確認前方到底是個什么障礙物。
傳統毫米波雷達加攝像頭的融合算法里,最難解決的就是對靜止障礙物的檢測。
例如強大如特斯拉,依舊會撞上側翻的大卡車。這涉及到融合算法的邏輯,多數情況下的做法是將毫米波雷達探測的禁止障礙物剔除,減輕視覺算法的計算量,因為多數靜止障礙物來自路邊的樹、防護欄等。
4D 毫米波雷達能夠獲得更高分辨率的障礙物距離信息,這些信息將有助于融合算法對不同障礙物做更細致的處理。
同時,由于分辨率更高,系統也能更精準地獲得移動物體的速度信息和姿勢,再通過算法就可以做出行為預測,這將有助于車輛對「鬼探頭」場景的提前預判,提前規劃合理避讓。
關于 4D 毫米波雷達和視覺算法之間的關系,我們可以再舉個例子。
假設你有一個女朋友,她生氣了說話就每次只蹦一個字,作為直男,你得擁有超高的情商,以及長期相處訓練出來的經驗,才能弄懂她的真實意圖并作出正確決策。
現在你女朋友成長了,生氣后每次會說一整句話,溝通成本大幅下降,不需要太高的情商,也不需要太長的訓練周期你就能哄好女朋友。
4D 毫米波雷達就是溝通更高效的女朋友,能夠降低車企對圖像深度學習能力的要求,也能縮短算法研發周期。
同時區別于激光雷達,4D 毫米波雷達和攝像頭更容易搭配。
這一方面是因為現有視覺和毫米波雷達融合算法足夠成熟,另一方面在于 4D 毫米波雷達能夠更好地與攝像頭補位。
激光雷達在雨雪及大霧天氣容易失效,但同時這也是攝像頭的短板所在,4D 毫米波雷達繼承了毫米波雷達在惡略天氣下的感知能力,同時具備接近激光雷達的高分辨率,因此確實是以視覺為主多傳感器融合方案里實力強勁的新成員。
有了 4D 毫米波雷達,干嘛還要激光雷達?
除了 4D 毫米波雷達,ES33 還搭載了 1 個 Luminar 提供的激光雷達 lris。

這顆 1550 納米的激光雷達放在了車頂了,這個位置相比放在保險杠上有太多的優勢。
不僅探測視野更好,而且也不容易被搞臟(激光雷達非常怕臟污),行人碰撞也更加好做,日常行駛也不會因為輕微的擦碰事故所傷及。
放在車頂唯一的問題就是風燥會比較明顯,當然這顆 Luminar 的激光雷達體積已經非常小了。
這顆雷達的另一個優點是采用了 1550 納米的激光,另一種 905 納米波長的激光雷達為了保護人眼,只能以低功率運行,而 1550 納米的激光在到達視網膜之前,就會被眼球的透明部分吸收完了,對人眼并沒有傷害,所以可以更高的功率運行。
更高的功率可以直接增加點云分辨率、更遠的探測距離以及增強復雜環境的穿透力。

官方顯示 lris 參數為 120 度水平視場角,和 30 度的垂直視場角,反射率小于 10% 時的最大探測距離為 250 米。
這是什么水平呢?我們做個競品對比:
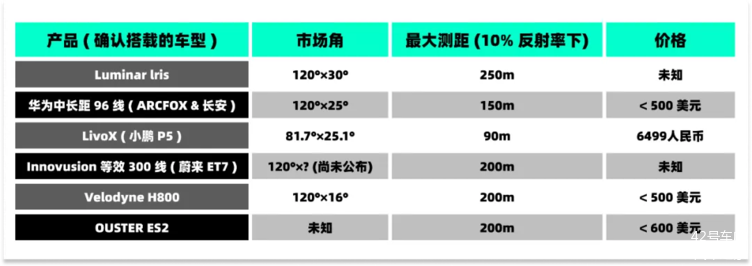
賬面數據來看,Luminar lris 是幾款產品中最優秀的,但這款產品目前仍未量產,且需要聯合上汽一起做車規級驗證。LivoX 相對而言更為早期一些,因此參數上略顯不足。
為了確保 lris 能夠順利上車,Luminar 還將在上海建立 office,共同推進產品驗證以及提供軟件服務。
根據 Luminar 發布的新聞稿來看,Iris 可能會在上海生產,不排除后期雙方成立合資公司的可能性。
此外我們通過 Luminar 官方發布的新聞稿來看,這款雷達的核心功能是幫助實現高速公路的自動駕駛,因此我們大致可以理解為何 ES33 有了 4D 毫米波雷達,還要搭載激光雷達。
事情要從蔚來 NOP 和小鵬 NGP 說起,地圖融合的高速公路輔助駕駛功能不斷亮相,寶馬、吉利、奇瑞星途等車企也將在今年發布類似的功能。這些功能的基礎在于激光雷達繪制的高精地圖,和國內基于地基增強系統的高精定位。
以小鵬 NGP 為例,體驗下來會遇到兩個技術問題,超長的隧道和城市峽谷中,系統存在偶爾退出的情況。
這個問題的核心都在于高精定位,現階段大家都是通過 RTK 或 RTX 信號實現高精定位,并將定位信息反饋給高精地圖,一旦信號被遮擋丟失,功能就無法繼續使用了。有時還會弄錯目標在垂直方向上的定位,導致明明在高架下面,系統會以為你在高架上,因此開啟輔助系統。
有了激光雷達便能夠解決這個問題,系統可以通過激光雷達掃描的前方點云圖,與高精地圖做比對,一方面可以和高精定位數據做驗證,另一方面也可以在定位丟失的場景下,通過比對獲得車輛的動態絕對定位,算是成為高精定位的冗余。

在開放場景下,要想從輔助駕駛突圍到自動駕駛,傳感器和計算芯片做冗余是必不可少的,作為一款 2022 年下半年才上市,交付時間待定的車型,激光雷達是不能缺席的,否則面對即將到來的高速公路場景下的 L3 自動駕駛,R 品牌是沒有入場券的。
理解 4D 毫米波雷達和激光雷達的用途,我們再來看楊曉東現場說的那句話:「不會將前方卡車的白色貨箱與天空混為一談,更不會對幽暗狹長的隧道束手無策。」
有沒有覺得火藥味很濃?他這是一口氣嘲諷完了特斯拉、蔚來和小鵬呀!
關于 Orin , 有必要拿它和 ET7 做對比
2020 年英偉達創始人、CEO 黃仁勛公開表示,理想汽車將成為第一個使用 Orin 系列芯片的制造商,而且英偉達為了配合理想汽車的生產周期,將 Orin 的量產時間從 2023 年提前一年到了 2022 年。
2021 年 1 月的蔚來 NIO Day 上李斌也表示蔚來是全球首款搭載英偉達 Orin 芯片的車企。
在昨晚的發布會上楊曉東也宣布,R 品牌是全球率先搭載 Orin 的量產車,由于上汽面子夠大,現場甚至還請到了英偉達的黃教主云站臺。
不過 ET7 計劃 2022 年 Q1 交付,而 ES33 要到 2022 年下半年才上市,交付時間還是未知數。
雖然有消息稱,英偉達的 Orin 不可能趕在 2022 年 Q1 交付,但至少從現在官宣的時間來看,ET7 是比 ES33 早的。
讓我更覺得疑惑的是,ES33 有可能尚未規劃好如何來使用 Orin 的算力,畢竟官方公布的信息也是擁有 50 0至 1000+ Tops 的算力,還是個靈活的半開半閉區間。
李斌在蔚來 NIO Day 上介紹 ET7 的算力之前,用了很長的篇幅介紹首次搭載的 800 萬高清攝像頭,以及高清攝像頭產生的海量數據,因此我們能夠理解為何 ET7 需要 4 塊單芯片算力達 254 Tops 的 Orin。
處理視頻信息是 GPU 的特長,而 GPU 是英偉達的特長,也是 Orin 的主要組成部分。
關于算力的需求規劃,R 品牌的說法是,「配合全棧自研的超級環境模型算法,實現感知即融合」,雖然沒聽懂,但有種很高級的樣子。
軟件能力才是真正的刺刀
正如標題中提到的 R 品牌集齊地表最強毫米波雷達 + 固態激光雷達 + 計算芯片,從硬件來看一切都非常美好,但是真正的體驗能做到幾何,決勝點在于上汽的軟件能力。
目前實現自動駕駛的核心還是視覺感知技術,視覺識別的能力完全依托于軟件算法的訓練,行業標桿特斯拉 FSD Beta 超級細致的識別能力背后是多位行業大拿和超過 5 年的自研經驗和大量數據迭代而來。
在發布會后的采訪中上汽透露,全棧自研的自動駕駛團隊就是 R 汽車的智駕團隊,云計算團隊也是上汽集團的零束,也就是軟件中心。
當然,大量的毫米波雷達和激光雷達可以來輔助攝像頭感知,可以處理很多攝像頭無法識別的 Corner Case,在極端天氣或者一些極端細小的物體探測上確實有優勢,但是目前還沒有對外秀過軟件實力的 R 汽車到能把 PP-CEM 全棧自研高階自動駕駛方案做成什么樣子仍然是個未知數。
我們希望所有車企在發布會上拿特斯拉當作反面教材的同時,也對特斯拉在北美目前的實力有所認知,也希望明年交付之際在更豐富的感知硬件的賦能下,能夠有比特斯拉更強的自動駕駛能力和更好的使用體驗,全方位的超越特斯拉。
這一刻,我們會用最熱烈的掌聲迎接這歷史性的時刻。
上一篇:傳吉利關聯公司年內推出7nm車規級芯片
下一篇:西門子交通與博世合作 推出互聯網車輛集體感知系統
推薦閱讀
史海拾趣
隨著國內市場的飽和,CSB公司開始將目光投向海外市場。公司制定了國際化戰略,通過設立海外分支機構、拓展國際市場渠道、加強與國際合作伙伴的合作等方式,逐步實現了全球市場的布局。在國際市場上,CSB公司的產品和服務得到了廣泛認可,為公司帶來了豐厚的回報。
這些故事雖然是對電子行業企業發展的一般性描述,但可能在一定程度上反映了CSB公司或其他類似企業在電子行業中的發展歷程。然而,需要注意的是,每個企業的發展道路都是獨特的,具體的故事還需根據企業自身的實際情況來編寫。
在電子行業的早期,Deltrol Controls以其創新的電磁閥產品嶄露頭角。公司創始人認識到,隨著自動化程度的提高,對精確控制流體流動的需求日益增加。于是,他們投入大量研發資源,成功開發出了具有高精度、高可靠性特點的電磁閥。這一創新產品迅速在電子行業獲得認可,Deltrol Controls也借此機會逐步擴大了市場份額。
在電子設備的制造過程中,螺線管是不可或缺的元件之一。然而,傳統的螺線管生產方式存在效率低下、質量不穩定等問題。Deltrol Controls通過引進先進的生產設備和技術,實現了螺線管的精細化生產。這一舉措不僅提高了生產效率,而且保證了螺線管的質量穩定性。憑借這一優勢,Deltrol Controls在電子行業中的競爭力得到了顯著提升。
隨著電子技術的飛速發展,AIE公司不斷投入研發力量,推出了一系列具有創新性的測試配件產品。其中,AIE金屬探頭以其高精度、高穩定性的特點,受到了市場的廣泛認可。此外,AIE還針對汽車行業推出了ADK汽車診斷試劑盒,為汽車維修和診斷提供了便捷、高效的解決方案。這些技術創新和產品升級不僅提升了AIE的市場地位,也推動了電子測試技術的不斷進步。
Antiference公司最初以生產電磁屏蔽材料起家,但隨著電子設備的普及和電磁干擾問題的日益嚴重,公司意識到單純的材料生產已無法滿足市場需求。于是,Antiference投入巨資研發新型電磁干擾抑制技術,成功開發出了一款能夠顯著降低電磁干擾的芯片。這款芯片迅速在市場上獲得了廣泛認可,Antiference也因此成為了電磁干擾抑制領域的領軍企業。
佰鴻公司在2008年成立之初,正值LED行業蓬勃發展的時期。面對激烈的市場競爭,公司經過深入的市場調研,確立了LED大功率路燈制造商、方案提供商、系統集成商的市場定位。隨后,佰鴻在大功率路燈照明市政LED改造方面投入大量精力,成功完成了蘭池大道、咸陽快速干道等多個大型LED路燈方案設計及老舊路燈改造項目。這些項目的成功實施,不僅為佰鴻在市場上站穩了腳跟,也為其后續發展奠定了堅實的基礎。
|
好久沒來了,感覺很對不起似的,心里有中失落感,壇子好酒,可我們是如何認真對待的呢。。。 我有所改變,應該,以后堅決為論壇多做事,歡迎大家提問… 查看全部問答∨ |
|
|
我想做一個電路,即軟件配置成是232通信還是485通信。當然單片機端的輸入/輸出端口公用,通信接口端也管腳公用。 我想可以通過模擬開關實現,而且一定有人用過,有成熟的電路,所以特請教。 謝謝!… 查看全部問答∨ |
|
|
問題見紅色注釋 驅動中的函數:(驅動肯定沒問題的,是教程上自帶的) static ssize_t s3c2440_18b20_read(struct file *filp, char *buf, size_t len, loff_t *off) { DS18B20PRO(); *buf=sdata; ...… 查看全部問答∨ |
vs2005可以調試wince代碼,但是不能用遠程工具,是平臺管理。 vs2005可以調試wince代碼,但是不能用遠程工具,是平臺管理。 估計nk里少了遠程工具的模塊,要怎樣才能將模塊直接放到wince的nandflash里,啟動它,然后和pc機的遠程工具連上。 nk啟動后,tcp/ip是通的,ping驗證。 C:\\Program Files\\Common F ...… 查看全部問答∨ |
|
#include<reg51.h> unsigned char code tab[]={0xco,0x9f,0xa4,0xb0,0x99,0x82,0xf8,0x80,0x90,0x88,0x83,0xC6,0xA1,0x86,0x8E}; sbit S1=P2^0; //這一段是什么意思?? void Delay() { unsigned int i,j; ...… 查看全部問答∨ |
|
|
說說以下程序的意思 void IsrIRQ( ) { int count = 0; unsigned int isr_pending; unsigned int isr_mask = 0x00000001; ...… 查看全部問答∨ |







 R463N347040M1M
R463N347040M1M






 京公網安備 11010802033920號
京公網安備 11010802033920號