大家好,我是電動車公社的社長。
最近,小鵬汽車因為兩件事火了。
第一件是股價,一天之內暴漲33.92%,讓許多人嘗到了支持新能源的甜頭。何小鵬反應很快,發了一封全員郵件,希望小鵬汽車的小伙伴們放眼長線利益,不要只看短期股價的漲跌。
隨后股價果然跌回了暴漲前的價格……

另一件事,就是何小鵬和馬斯克互懟了。
事情的起因是一位海外友人看熱鬧不嫌事兒大,在推特上問馬斯克:“如何看待小鵬汽車在自動駕駛領域采用激光雷達,沒有采用和特斯拉相同的純視覺路線?”
不僅如此,還添油加醋地補充了一句,“小鵬汽車是不是意識到他們抄襲特斯拉的方案行不通了。”

推特紅人馬斯克當然不會放過這個營銷的機會,直接指責小鵬汽車抄襲——
“他們只有我們舊版的代碼,但沒有我們最新的神經網絡系統。”

何小鵬也不甘示弱,對此進行強勢回應:

兩邊的粉絲也抄起鍵盤,吵得不可開交。一方認為馬斯克打擊異己,是一種霸凌的行為;另一方則認為小鵬汽車有剽竊代碼的嫌疑,應該調查。

那么,為什么馬斯克會如此反對激光雷達?
小鵬汽車,到底有沒有抄襲?
以特斯拉為首的視覺派,和大多數廠商都支持的激光雷達派,誰才是自動駕駛的出路?

01. 激光雷達有多重要?
以前社長就和大家簡單聊過,ADAS高級駕駛輔助系統需要感知、判斷、操控這三步,才能進行駕駛的操作。就像我們需要雙眼去觀察、需要大腦去判斷、需要四肢去操控才能開車一樣。

這里面,負責判斷的算法、負責操控的車輛架構都是各花入各眼,廠家們自有辦法。但在負責感知的硬件上,卻產生了巨大的分歧。
我們知道,感知的方法主要分為估計型的攝像頭,以及測量型的雷達。就好比走路用的拐杖和眼睛,一個負責判斷周圍有沒有絆腳石,一個負責判斷周圍有沒有路、有沒有人。

對于大多數廠家來說,只用一種感知方式是不夠可靠的,事關安全無小事。
因此,大家普遍采用測量型和估計型緊密結合的技術路線,用豐富的硬件最大程度地感知環境,減少發生問題的風險。攝像頭、毫米波雷達、超聲波雷達、激光雷達多多益善,要是能用上GPS定位、高精度地圖甚至是V2X車路協同,那就再好不過了。
總之,走路用的拐杖越多就越放心,反正咱有鈔能力。
如果說大家的區別,無非是這家鈔能力弱一點,那家鈔能力強一點而已。
弱一點的,就比如傳統主機廠和造車新勢力,用有限的傳感器實現部分自動駕駛,實現的是ADAS Cars,輔助駕駛汽車,目前最多能夠支持到L3。

強一點的,就比如Waymo、百度Apollo、Super Cruise,用大量傳感器實現完全自動駕駛,理論上要實現L4,甚至是L5。
激光雷達,就成了實現自動駕駛必不可少的硬件設備。Waymo甚至“以販養吸”,成為了激光雷達的供應商,直接對外銷售激光雷達。
我們在一線城市的開放試驗區見到的自動駕駛測試車,100%都頂著這樣的一個“大腦袋”,里面裝的就是16/64/128線的激光雷達。

由于激光雷達每秒能發射數百萬個激光束并測量返回時間,從而得到周圍物體確切的距離和形狀。

這海量的感知信息,能夠讓自動駕駛汽車更精確、更穩定地感知到周圍環境,比如能從2σ(97.73%)提升到3σ(99.87%)。
所以一些舍得下本的品牌,就會采用激光雷達來換取安全覆蓋率的提升。
不過,“一分錢一分貨”這句話,在激光雷達上再一次得到了應驗。
已經獲得百度、福特、現代、尼康等多家公司投資、也是全球最大的激光雷達公司Velodyne,其16線、32線、128線激光雷達的價格,高達4000、4萬、8萬美元!
就這4000美元的VLP-16,還是在2018年打了5折之后的價格。

想要用硬件實現L3,怎么也得裝一個,就比如率先實現L3的奧迪A8,車頭的位置就有激光雷達。要是想實現L4,全車的一套系統怎么也要5萬美金以上,奢侈點的甚至會達到10萬美金!別說特斯拉了,這筆錢買保時捷Taycan都綽綽有余。

為此,馬斯克不惜在公開場合怒懟激光雷達,也包括用了激光雷達的其他自動駕駛公司。
“激光雷達就像人身上長了一堆闌尾,闌尾本身的存在基本是無意義的,如果長了一堆的話,那就太可笑了。任何依賴激光雷達的公司都可能無疾而終。”
這也揭開了特斯拉和其他廠商之間斗爭的序幕。

02. 進擊的馬斯克
馬斯克拿出來的解決辦法,是作為估計型感知的純視覺方案。這種三目攝像頭的環視解決方案,成本不過300多美金而已,比激光雷達便宜了不知多少倍。
其實想法也很簡單:一個健康的人不可能用拐杖走路。人的眼睛能做到,憑什么攝像頭的純視覺就做不到?
如果你說人類能做到是因為有大腦,那就讓神經網絡系統模擬大腦不就完事兒了!
在純視覺路線的引導下,特斯拉招募了一大批在常青藤名校做視覺的碩士生或者博士生,這群人也是在全球玩視覺玩得最6的。在最新的測試Demo里,特斯拉甚至已經在部分路段完成了L4級別的自動駕駛,并且能識別出絕大多數的交通參與者。
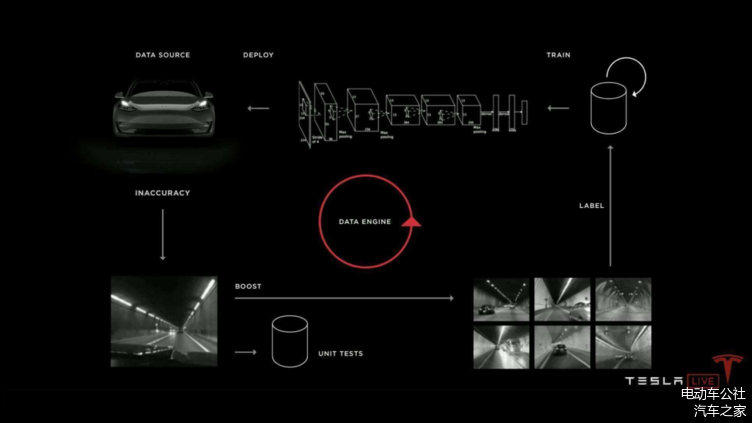
特斯拉是怎么做到的?其實就是這張圖:

簡單來說,我們的大腦是怎么學習的,它就是怎么學習的。
它會先通過特斯拉上的攝像頭,給周圍的交通參與者建立模型,同時把相片數據添加到神經網絡的訓練集里,讓人工告訴它這是什么。
形成一定規模之后,它就會有自己判斷的能力,比如這是一臺小轎車,那是一臺貨車,那邊是一個騎自行車的行人。
在特斯拉眼中,世界其實是這樣的。

我在哪,我周圍有沒有車道線,周圍有沒有交通標志,我周圍有幾個交通參與者,分別離我有多遠,他們運動的方向和速度都是什么……等等。
但神經網絡終究是個AI,它存在誤判的可能。有的是誤判了物體類別,有的是誤報,還有的是漏報。就比如前面有個龜速“老頭樂”,早期的特斯拉不會做出反應,會直直地撞翻過去。

但這時,特斯拉的測試車,以及幾十萬的特斯拉車主就會介入駕駛過程,要么剎車,要么變道。
人工干預會觸發一次快照,就是一段由多個攝像頭、毫米波雷達、GPS等多個傳感器組合得到的視頻剪輯,和相關的后臺數據。特斯拉的人員會進行復核,看看特斯拉的做法和人類的做法有什么區別,找出差距,然后讓系統自動改進,也就是標注的工作。
在標注中學習,就是特斯拉的“影子模式”。

當然靠人工提供的精確標注幫助機器學習,速度太慢了——招一堆人標注員花掉大量的人員工資,可不是特斯拉的風格。
特斯拉要做的,是讓機器自主學習!
既然特斯拉有幾十萬臺車在路上跑,那這些從路上得來的,就都是標注數據。
需要訓練防加塞功能?只要預測cut-in(加塞)的運動軌跡,再和真實數據進行比對就好了。需要訓練行人碰撞預警?只要預測行人的運動軌跡,再和真實數據進行比對就好了。
而且機器的判斷,錯得越離譜越好——只有在不斷的錯誤中,機器才能知道什么是正確的,才能在下次做出正確的判斷和反應。
在去年的自動駕駛發布會上,馬斯克宣稱特斯拉是沒有建設數據中心的,而是用每一臺特斯拉組成了一個巨大的服務器集群。所以特斯拉才需要在HW3.0硬件上堆算力極高的芯片,只有算力夠高,才能處理得了這么多的數據,才能進行大量的判斷和計算。
通過算法和海量的數據,讓特斯拉的駕駛能力高于人類,就是特斯拉真正的王牌。

這也成了馬斯克懟何小鵬的信心來源——我們有神經網絡系統,能做成純視覺;你沒有,所以你只能去采購高成本的激光雷達。
一言以蔽之:弟弟啊!奔跑吧!追趕吧!
03. 小鵬到底抄沒抄襲?
但特斯拉的純視覺路線,有一個致命的缺點。
因為攝像頭是二維而不是三維的,現實卻是三維的——這中間,會存在信息失真。
就比如對于這臺MPV的識別,同樣的感知位置,但純視覺方案的結論更長、更窄,和物理上的事實有出入。人可以通過經驗判斷出車大概有多大,但攝像頭不行。


而且,人都有可能被自己的眼睛欺騙,更不用說攝像頭了。
此前,特斯拉就因為采用了不成熟的純視覺方案出過不少事情。把大貨車識別成一朵云直直撞了上去、在武漢直接撞翻一片中央護欄、識別出廣告中一閃而過的STOP標志從而剎車等等不勝枚舉,還遭遇了公關危機。
最近還有博士生用投影儀把二維的人體影像投射到路面上,測試用的特斯拉Model X卻并沒有識別出來是假人,依然進行了主動剎車操作,也證明了這一點。

這種缺陷,只能通過大量的學習和算法的演進,讓機器學會和人類一樣識別和修正。
所以包括小鵬在內,希望做L4自動駕駛的廠商都沒有采用純視覺的方案,而是用視覺+雷達進行雙重感知,用大量的安全冗余來確保車輛和乘員的安全。眼睛沒看見障礙物不要緊,再用毫米波雷達甚至是激光雷達去摸一摸,及時剎車或者躲避就好了。

這也是一開始何小鵬有實力回懟馬斯克,說要把馬斯克打得找不著東的原因。
那小鵬汽車到底抄沒抄襲?
我們先來說說硬件。
這是特斯拉的,12個超聲波傳感器,1個毫米波雷達,8個感知攝像頭(前3后1側4),算力72TOPS。(不是144TOPS的原因是特斯拉的第二塊芯片是做安全冗余的,不共同參與計算)

這是小鵬的,12個超聲波傳感器,5個毫米波雷達,13個感知攝像頭(前3后1側4環視4),算力30TOPS。

看上去,只是在車身四角多了4個毫米波雷達來輔助變道,多了4個環視攝像頭來輔助泊車,其他的配置都一樣!似乎有點抄襲那味兒了。
但實際上,特斯拉的三目攝像頭里,前視廣角攝像頭有150°,小鵬的只有100°,剩下的感知需要用毫米波雷達和環視攝像頭來輔助。而且特斯拉的后視攝像頭是長焦,也和特斯拉的短焦不一樣。
無論是攝像頭變了、還是布置位置變了,算法都是要跟著變的。
其實從圖上也能看出來,特斯拉的感知范圍幾乎沒有重疊,就好比雜技演員在走鋼絲,對自己的視覺算法非常自信。
但小鵬的感知范圍則有大量重疊區域,也用了大量的硬件來做安全冗余。攝像頭說這沒障礙物,我還得用雷達測一測才放心。

而且關于如何定位車道實現進出匝道,特斯拉是通過毫米波雷達探測金屬欄桿、再通過視覺來進行綜合判斷的,同樣依賴于算力和算法。但小鵬想要實現NGP,則要依賴于高精度地圖。下一代硬件,更是直接加入了激光雷達。
這也就是說,即使把特斯拉的全套代碼都放在現在的小鵬車上,小鵬也沒法用。
路線都不一樣,何來抄襲?
所以特斯拉在2019年起訴的是前視覺科學家、現小鵬汽車感知負責人而非小鵬汽車,在2020年要求獲得小鵬XPilot的完整源代碼庫、以及蘋果對小鵬前員工刑事指控的法院記錄的訴求,也被聯邦法院駁回。
法院給出的說法是,讓小鵬準備好XPilot的源代碼,和Autopilot源代碼一同移交第三方進行對比審核,并作為判決依據。
小鵬汽車也表明了自身的立場,“我們始終同意向中立第三方提供源代碼以供調查。”

04.誰才代表著自動駕駛的未來?
其實在自動駕駛這場戰爭中,沒有絕對的對與錯,只有適合和不適合。
在此前的所有方案中,純視覺方案,更適合那些才華橫溢的天才們發揮。他們用自己的智慧,讓機器學會和人類一樣深度思考,來代替人類駕駛車輛。
激光雷達方案,則更適合那些敬畏生命的老實人。在他們眼中,自動駕駛這類的新技術必須要達成100%的安全,而不是99.9999…%。

不過有意思的事情來了,今天文章里所提到的一切和競爭格局都有可能在接下來的1-3年內發生翻天覆地的變化:
關于視覺,馬斯克在幾個月前宣布:全部重寫FSD代碼。按照馬斯克的說法是:這是質的飛躍,并且會很快實現全自動駕駛。
關于激光雷達,華為在廣州車展前放出消息,他們計劃生產的激光雷達體積非常小,不再需要頂在車頂了,最關鍵的是,跟市面上動軸幾十萬的激光雷達相比,華為準備把價格打到100-200美金的白菜價,如果華為能做到,相當于價格降低了98%,那就真的會成為所有車企搶著買的爆款了!
這其中還有一個關鍵,馬斯克應該是理解不了中國的996的,就像馬斯克應該也不會理解我凌晨00:29分了,還在公司寫他不懂我們996一樣。所以他才會堅定地認為激光雷達的價格是不可能真正被打下來的。

當然,華為的激光雷達,目前還沒真正做到傳說中的超低成本,但據小道消息說,也已經到了幾百美金的區間了。(華為的故事,我正在寫,我們過兩天仔細講)
而馬斯克向來有“馬大嘴”之稱,吹牛歸喜歡吹牛,但牛的地方在于,吹過的牛都會實現,只是實現的時間一般會比他的“牛”里的時間稍微晚一點。
這場曠日持久的巔峰對決,才剛剛開始。
上一篇:Vishay推出符合AEC-Q101要求的PowerPAK? SO-8L非對稱雙芯片封裝60 V MOSFET
下一篇:激光雷達:為什么馬斯克不要我?
推薦閱讀
史海拾趣
作為一家有社會責任感的企業,義隆電子一直積極履行社會責任,致力于可持續發展。公司注重環境保護和資源節約,采用環保材料和節能技術生產產品。同時,公司還積極參與公益事業和社會活動,回饋社會。這種注重社會責任和可持續發展的企業文化使得義隆電子在行業內樹立了良好的形象。
以上五個故事簡要概述了義隆電子股份有限公司(Elan Microelectronics Corp.)在不同發展階段的關鍵事件和成就。這些故事展示了義隆電子在技術創新、市場拓展、人才培養和社會責任等方面的努力和成就。
Focus科技股份有限公司(虛構)在深耕外貿電商領域的同時,也敏銳地捕捉到了教育與醫療行業的數字化轉型機遇。公司利用自身在互聯網技術和大數據分析方面的優勢,研發了智慧教育平臺和移動醫療應用。智慧教育平臺通過提供個性化學習資源和在線互動教學服務,有效提升了教育資源的利用率和學生的學習效果;移動醫療應用則通過遠程醫療咨詢、健康管理等功能,為用戶提供了便捷的醫療服務體驗。這些跨界融合的產品不僅豐富了公司的業務線,也進一步提升了公司的品牌影響力和市場競爭力。
1991年,臺灣的電子行業正蓬勃發展,鈺創科技(Etron)在這一時期應運而生,創始人憑借對市場敏銳的洞察力,決定專注于利基型緩沖記憶體產品與系統晶片的設計與生產。初創時期,公司面臨著技術、資金和市場等多重挑戰。然而,鈺創科技憑借其團隊的技術實力和創新精神,成功開發出了一系列具有競爭力的產品,逐漸在市場上嶄露頭角。
虹冠電子注重全球市場的拓展,通過建立完善的營銷網絡和合作伙伴關系,將產品銷往世界各地。公司在新竹、汐止以及美國硅谷等地設有研發中心和生產基地,能夠為客戶提供及時、高效的技術支持和服務。同時,虹冠電子還與國內優秀的晶圓封測大廠等合作伙伴建立了緊密的合作關系,共同推動電源管理技術的發展和應用。
1984年,胡成中偕其弟胡成國等人在浙江省樂清市創立了“樂清縣求精開關廠”,這便是德力西的前身。當時,企業僅有3位股東,5萬元的資本,8名員工,以及單一的熱繼電器產品。憑借“以質取勝”的經營理念和靈活的機制,德力西在溫州市電器行業中逐漸嶄露頭角。
Advanced Components Industries Inc(以下簡稱ACI)在電子行業的崛起,始于一次關鍵的技術突破。公司研發團隊成功開發出一種新型的高效能電子元件,這一創新不僅提高了電子設備的性能,還降低了能耗。這一成果迅速吸引了市場的關注,ACI的訂單量激增,公司開始迅速擴張。
隨著技術的不斷完善和市場的認可,ACI逐漸在電子元件領域建立了自己的品牌地位。公司不斷投入研發,推出了一系列具有競爭力的產品,逐漸在行業中嶄露頭角。
|
這個問誰我想誰也沒有想過吧。但是所天我在上班時有個QQ好友問我了著,沒能很快的回答他,在這里我就說一下我個人的看法吧。 這個用什么畫都是一樣的,Wrod,畫畫工具,什么都行,只要是能加上圖和漢字的就都行。我用的是Wrod,這樣以后方更修改。 ...… 查看全部問答∨ |
|
|
請幫忙看看我的程序有何問題 -- 用C#開發CE.NET 5.0的程序時遇到FindFirstFile的問題 我在VS2005里用C#開發CE.NET 5.0的應用時有如下的代碼,但是在CE 5.0下運行時,總是報錯,錯誤是System.NotSupportedException: NotSupportedException. 在類LibWrap里有如下申明: public class LibWrap { [DllImport("COREDLL.dll",C ...… 查看全部問答∨ |
開始的時候是顯示器總是處在那個 顯示器工作中就是 RGB那三種顏色那個。 后來 我拆開機箱 吹吹灰 重啟電腦 還是那樣的情況 后來拔了內存條 。。。 最后 我摁了開機鍵后 沒有2秒鐘就自動關機了 但是指示燈還是亮的 再開機 就開不了了 ...… 查看全部問答∨ |
|
本帖最后由 hlxdz 于 2014-4-17 10:39 編輯 上面的絲印打的5014 但是我看不出是什么型號。 求助各位大俠,求大伙幫幫小弟… 查看全部問答∨ |












 STM32L081CZU6
STM32L081CZU6






 京公網安備 11010802033920號
京公網安備 11010802033920號