




研究場景與實際場景的不對稱,要求研究者和開發者必須持有更謹慎的態度。
10月26日至27日,2019第二屆全球智能駕駛峰會暨長三角G60科創走廊智能駕駛產業峰會在蘇州高鐵新城正式舉行。峰會主要聚焦“自動駕駛的量產時代、單車智能和車路協同的共演之路、新型的車內交互探索”三大主題,共同探討了智能駕駛的未來發展方向。
本次峰會由蘇州市相城區人民政府主辦,蘇州高鐵新城管理委員會、雷鋒網新智駕承辦,江蘇省智能網聯汽車產業創新聯盟、江蘇省人工智能學會智能駕駛技術專業委員會、清華大學蘇州汽車研究院、中國移動通信集團等單位協辦。來自主機廠、國內外一級供應商、自動駕駛解決方案商、自動駕駛核心零部件、出行運營商等智能駕駛上下游企業,車路協同專家學者、代表企業等1500余位業內人士蒞臨現場。
東南大學機械工程學院副院長、江蘇省新能源汽車創新聯盟執行理事長殷國棟的演講主要剖析了智能駕駛的多種關鍵感知技術,新智駕對其演講進行了不改變原意的編輯,以下為全文:
今天學術和產業界有智能駕駛、自動駕駛、無人駕駛、智能網聯汽車等等多種名稱,不同的單詞,總體有狹義廣義之分,但意思都是融合現有一些技術,提升汽車智能化的大平臺。
在這種環境下,乘用車應用場景離真正實用化還有一定距離,但一直在研究。我們希望能夠落地的場景也包括一些工業場景:限定場景的挖掘機、壓路機等,農業上的自動農機。科技部、中國農村中心也有自動農機專項,支持提升農業裝備智能化。百度、阿里都在做的物流車也是在推廣的一種限定場景。
這個過程中要解決的關鍵技術是智能感知、決策、控制、路徑規劃的總體方案,包括車輛識別、人行道識別。
我們看到的是非常美好的場景,實際上困難非常多,研究場景與實際場景是不對稱的,完全不是一個概念。

真實場景出現過很多問題,不是我們想象的那樣,研究者、開發者要帶著謹慎的態度。現在主流解決方案包括可見光相機、紅外熱成像儀、激光雷達等幾種不同的感知方案。廣義來說,這幾種方案都能很好地確定車輛自身狀態。
車輛狀態信息感知技術
很多專家把無人駕駛汽車定義為帶著四個輪子的機器人,這是一種非常巧妙的定義,代表智能車和很多場景機器人有類似的地方,但實際上車輛的狀態是完全不一樣的。汽車是行走的,不確定因素非常復雜。
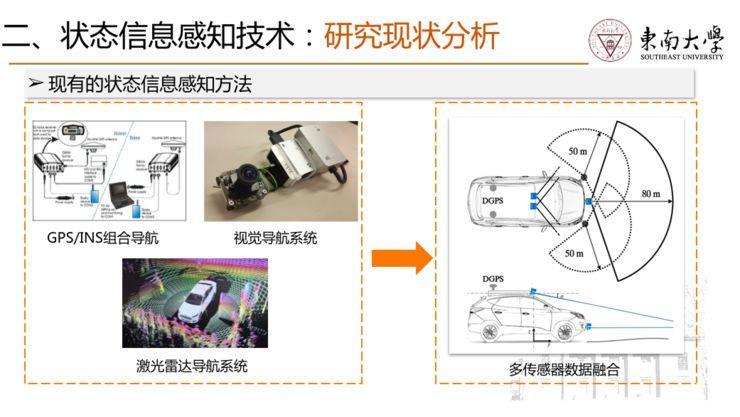
現有的狀態信息感知方法有 GPS/INS 組合導航,國家有自己的北斗導航系統,非常精確。
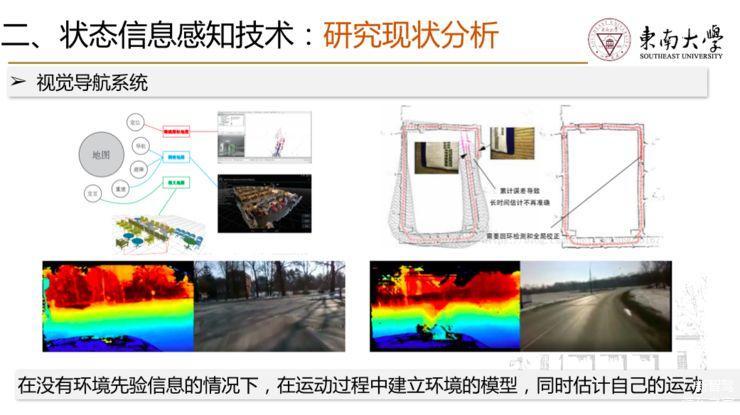
另外一個是視覺導航系統,可以識別各種不確定的小的障礙物,但是傳統方法大部分是基于離線的。我們希望它在運動環境中能夠提取自身狀態。
再一個是激光導航系統,前天比賽中很多車拿到了非常好的成績,也都在踐行這種方法,激光導航系統可以根據當前相城區域的比賽場景,規劃自己的真實路線。
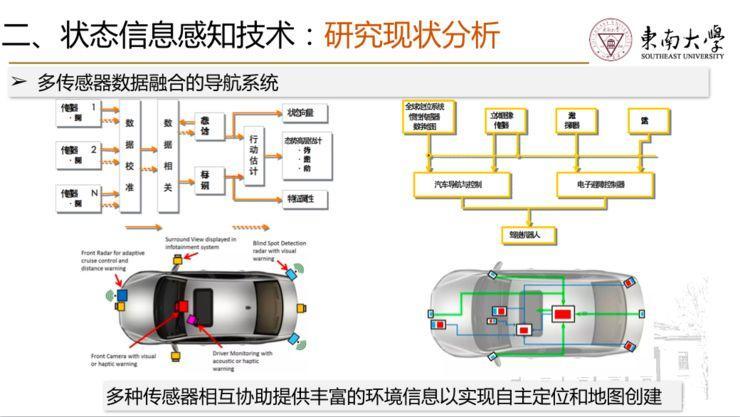
我們希望用多傳感器定位信息,在這個過程中要應對的問題非常多。車的最大要求是安全,多傳感器融合的實時性、準確性是一定要保障的,在這個過程中,我們也實踐了非常多的特殊場景。
第一種是農用拖拉機,做成無人駕駛,在特定場景下能夠完成一定工作。第二種我們定義為小坦克,這輛車不是真正的車,但是可以把所有傳感融合信息做出來。我們做的方程式賽車,把單目攝像頭、雷達組合大腦用上去,效果非常好。另外是多車協同,多車是未來,我們希望把不確定多車定位系統融合進來。

而且,車行駛過程中的所有狀態要估計出來,可能會有路面狀態估計、車輛正常加速、質量的不平衡等等。
激光雷達感知技術
對于車輛而言,安全性是非常關鍵的。激光雷達應該說非常普遍了,它可以為智能車輛或機器人相關的一些智能裝備提供可行性,價格也在不斷降低,對于汽車產業而言非常重要。
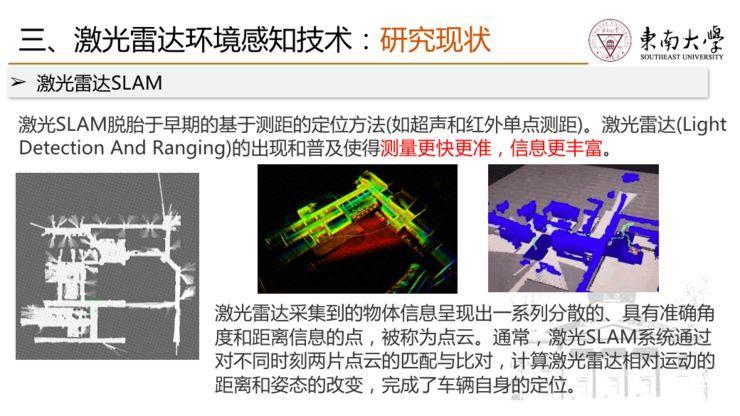
激光 SLAM 大家用的比較多,它相對以前的設備更精確,信息更豐富,能夠進行很多移動物體的檢測。這個過程當中,我們希望把車輛的很多非線性狀態,用卡爾曼濾波做一個很好的估計,包括預測、環境觀測、地圖更新。之后我們還可以把里面所有常規問題轉化為圖像處理。
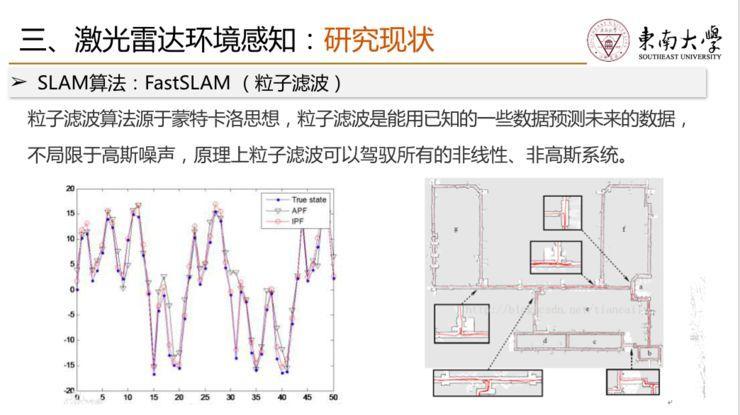
粒子濾波是做大數據計算的非常好的方法。多線激光雷達能夠通過環境地圖的感知系統,搭建出當前的路徑規劃,進行實時定位和地圖構建,在這個過程中,我們希望能夠實時建構地圖,為獲取后面所有信息以及當前姿態做一個鋪墊。
今天包括中國移動、無錫天安集團在做的車聯網,都是在 5G 環境下,一輛車一定是和網路、和整個云平臺結合起來的,這也是我們一直在做的。
視覺環境感知技術
很多傳統方法已經不適應現在智能車聯對于數據或信息獲取的要求了,因為我們現在的行駛環境非常的復雜。

在傳統視覺方法的基礎上,我們要融入現代的人工智能與深度算法做訓練。要訓練多少次才能把當前速度實時反映出來?訓練次數越多,對于走到實際環境當中的車輛,精確度越高。我們要做交通場景識別、真實場景識別、交通標識識別,然后再分類,目的就是得到精確的人、車以及靜態、動態的各種障礙物的位置。
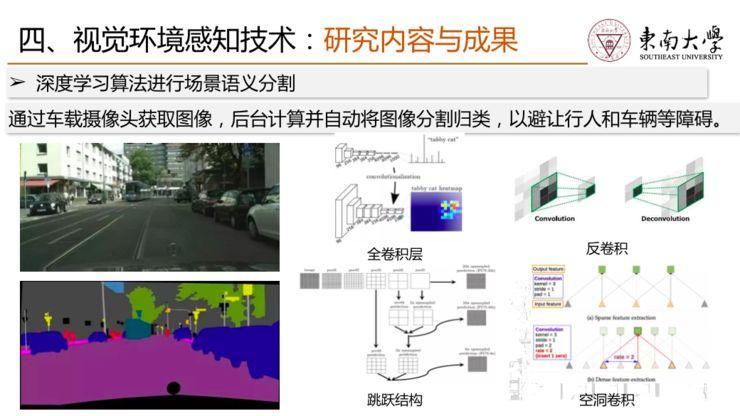
精確分割精度越來越難。利用視覺進行狀態估計,就是車輛在行駛中,對外部行駛狀態的一種估計。
紅外環境感知技術
因為是在良好天氣狀態下,這次比賽很少用到紅外,如果是晚上去比賽,我相信很多比賽車隊就會放棄,因為我們沒有開發適于晚上的場景。經常有人跟我開玩笑說,你這輛車能不能晚上出來幫我巡邏,起到警告作用,晚上 12 點鐘加上旋轉的警燈。我說晚上不行,技術不行,不敢晚上去做。
對現有傳感器進行一個紅外傳感器的補充,晚上是能夠識別的,而且簡單實用,現在都要加進來。用紅外傳感器首先采集圖像數據集,建立起一個非常好的數據庫,用優質網絡進行訓練。

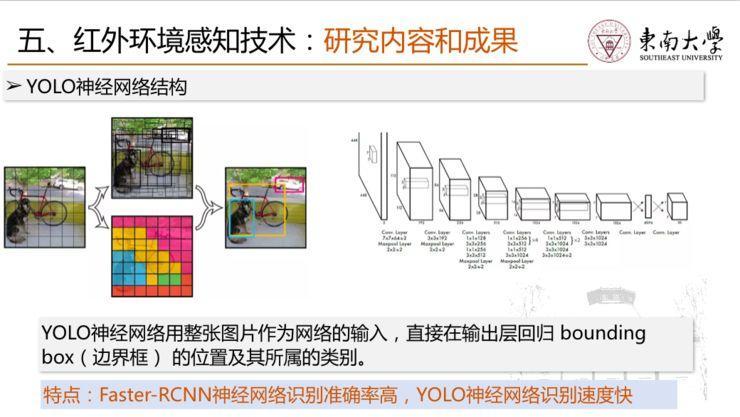
我們用的神經網絡結構,可以把這條路上所有場景采集出來,包括把不同車型、不同物體的特征,放在紅外里面進行特征提取。我們能夠把這里面的小特征或者不具有明顯特征的東西,提煉出來為我們所用。感知到才能做決策。
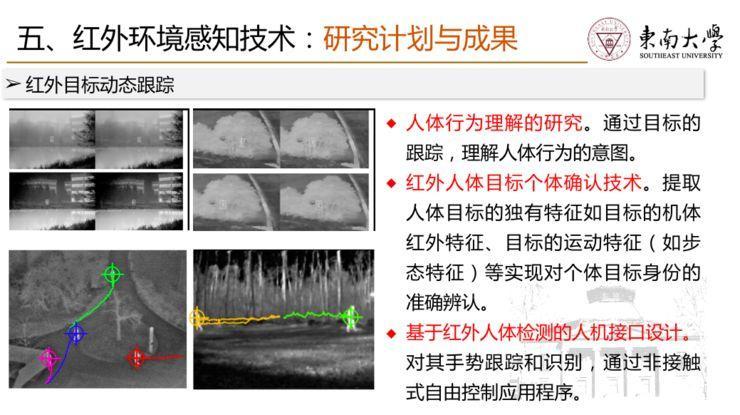
還有一個是紅外目標動態跟蹤,不僅要采集到這個人,還要跟蹤。我們也開發了一個腦控電動汽車,說白了就是我想象它往左邊就往左,歡迎大家去東南大學體驗。
多傳感器融合環境感知技術
單個傳感器已經無法滿足真正的感知系統,很多人都在研究多傳感器融合的感知技術。傳感器類型越來越多,無論幾種,一定要分類清楚,最后才能做到信息融合,適應真正的場景。
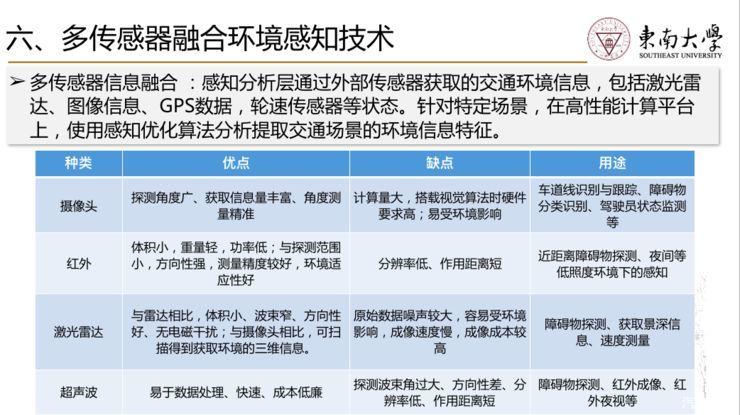
這些技術方案放到真實場景中各有優缺點。一種方案能不能移植到另外一種方案上?不可以。場景變了,所有要求就變了,要求的精度改變,方案就要變化。
我們要用所有方案的優點解決可能出現的一些問題,把所有車型都加進來,才能夠解決真正的問題。把這個問題解決好以后,我們建了一個雙目數據庫,要在春夏秋冬不同天氣做采集,這是最難的地方。做好之后再進行標準匹配。再之后是紅外熱像圖,首先是做人工標記和自動標記,采集各種障礙物,建立訓練樣本。最后再把訓練樣本放到大數據庫里面進行標記。
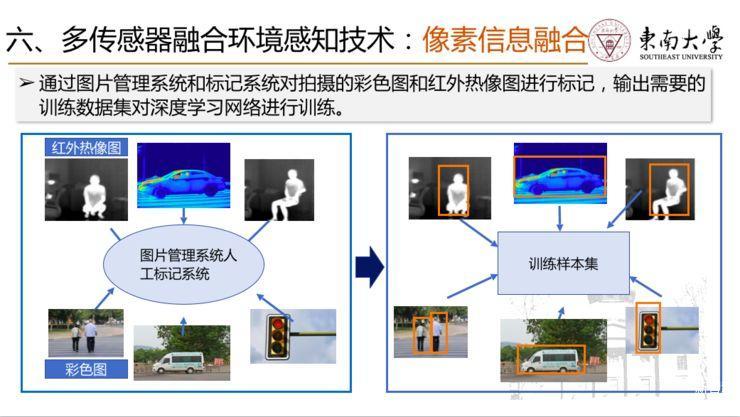
我們聯合南京大學,把這個數據庫做得非常大,目標是能夠利用雙模態訓練,快速適應真實場景。另外,我們不僅僅做理論前期研究,也驗證一些虛擬平臺,使車輛真正達到 24 小時隨時適應不同天氣的各種場景。
技術推進有很多有效方法,比如神經網絡等等,這些方法不僅僅能夠用在車上,還有很多場景,比如軍事目標獲取,都是一些非常規感知系統,智能交通的各種不確定性交通疏導,以及安全場所設定。我個人認為,環境感知中的復雜性,對我們提升車輛以及未來智能裝備的智能水平有非常大的好處。
上一篇:面向中國市場,華為正式發布自動駕駛網絡解決方案與系列產品
下一篇:特斯拉搶奪自動駕駛蛋糕,將新增 HOV 自動識別功能
推薦閱讀
史海拾趣
Flambeau公司(全稱Flambeau, Inc.)成立于一個注重創新和實用的時代,初期便明確了自己的市場定位——設計、開發和制造高質量的吹模、注模塑料儲存產品。公司創始人憑借對電子行業趨勢的敏銳洞察,以及對材料科學和制造工藝的深刻理解,成功開發了一系列符合電子行業需求的儲存解決方案。這些產品以其耐用性、可靠性和創新性,在電子元件的存儲和運輸領域迅速獲得了市場認可。
為了確保產品質量和穩定性,Bomar Interconnect公司建立了嚴格的質量管理體系。公司引進了先進的質量檢測設備和方法,對原材料、生產過程、成品進行全面檢測和控制。同時,公司還加強了員工培訓,提高了員工的質量意識和操作技能。這些措施有效提升了產品的質量水平,降低了不良品率,為客戶提供了更加可靠的產品和服務。
為了更好地服務中國市場和亞太地區的客戶,FRIWO在中國深圳設立了生產基地——飛煌德商科技(深圳)有限公司。該生產基地負責開發、生產、加工電源變換器、電源充電器等產品,并承擔自產產品及同類商品的批發、傭金代理、進出口及相關配套業務。飛煌德商科技(深圳)有限公司的成立和發展,不僅增強了FRIWO在中國市場的競爭力,也為公司的全球化戰略提供了有力支持。通過不斷優化生產流程、提升產品質量和服務水平,飛煌德商科技(深圳)有限公司逐漸成為了FRIWO在全球供應鏈中的重要一環。
近年來,FRIWO與印度UNO MINDA集團建立了戰略合作關系,共同開發印度電動汽車市場。UNO MINDA集團投資1500萬歐元收購FRIWO AG的部分股權,這一交易標志著FRIWO在電動汽車領域的進一步拓展。雙方合作將結合FRIWO在電源和充電技術方面的優勢與UNO MINDA在印度市場的深厚基礎,為印度市場提供完整的電驅動系統解決方案。這一合作不僅增強了FRIWO在全球市場的影響力,也為印度電動汽車市場的發展注入了新的活力。
為了更好地服務中國市場和亞太地區的客戶,FRIWO在中國深圳設立了生產基地——飛煌德商科技(深圳)有限公司。該生產基地負責開發、生產、加工電源變換器、電源充電器等產品,并承擔自產產品及同類商品的批發、傭金代理、進出口及相關配套業務。飛煌德商科技(深圳)有限公司的成立和發展,不僅增強了FRIWO在中國市場的競爭力,也為公司的全球化戰略提供了有力支持。通過不斷優化生產流程、提升產品質量和服務水平,飛煌德商科技(深圳)有限公司逐漸成為了FRIWO在全球供應鏈中的重要一環。
|
想請教一下做對日導航程序的高手,BSP中一般加入下面的那個日文字庫呢? Ms Gothic&MS Pgothic&MS UI Gothic Ms Gothic&MS Pgothic&MS UI Gothic(Subset 1_50) Ms Gothic&MS Pgothic&MS UI Gothic(Subset 1_60) Ms Gothic&MS P ...… 查看全部問答∨ |
|
|
急急急!非常郁悶,給GPRS終端發送數據(UDP模式),但終端接收不到數據 思路如下: 1,GPRS終端每隔30秒發送一次心跳數據保持GPRS連接 2,每次發送心跳數據,服務器都存貯一次此時的GPRS的IP地址和端口號 3,當服務器想要主動發送數據到GPRS終端的時候,讀取對應存儲的IP地址和端口號 4,服務器發送數據 相關程序如 ...… 查看全部問答∨ |
大俠好: 我用的芯片是STM32F103ZC,用IAR EWARM做開發。 我用 ICP 燒寫程序到片內的的nor flash 很方便,但是我現在想把程序燒寫到片外 nor flash ,我沒有編程器,要用什么方法燒寫呢??? 網友說可以自己寫個 ICP 或者 IAP 的程序,但是不 ...… 查看全部問答∨ |
|
最近正在學習基于2410的開發,對于s3c2410.h頭文件中,操作GPIO口的有兩個函數不大明白: 1。set_gpio_ctrl(x) 2。write_gpio_bit(x, v) 他們的定義分別如下: #define set_gpio_ctrl(x) \\ ({ GPCON( ...… 查看全部問答∨ |
|
|
問一個鍵盤的模擬問題,如何做一個畫面鍵盤來代替微軟的軟鍵盤,有點難度呀!!! 各位好,我現在想用自己的畫面來實現一個鍵盤功能.就是當用手點觸摸屏幕畫面中的A按鈕時候(A按鈕是我自己畫的一個按鈕),能夠象點微軟的軟件盤上的按鍵"A"一樣的功能.這樣就可以完全代替微軟的軟件盤了. 請問該怎么調用API,或者如何實現呢? ...… 查看全部問答∨ |
打了客服,它說ISP下載要先燒一個LDROM的BIN文件,看了一下它的要求是從10000H開始燒錄,而我用的是否superpro Z 的燒錄器,好像代碼最大也就到8fff.請問怎么開始燒那個10000H開始的ldXXXX.bin的文件.… 查看全部問答∨ |







 TX58-41-48
TX58-41-48- 傳統晶體管的極限!臺積電3nm N3P已量產
- 分析師稱H20出口管制毫無意義:對中國AI發展影響不大
- 解鎖機器人未來趨勢,把握傳感集成之道——Melexis推出電子指南
- 使用單線對以太網推動人形機器人發展
- DigiKey 于 2025 年第一季度新增近 10 萬種新產品和 100 多家新供應商
- 意法半導體ST25R系列高性能NFC讀卡器新增車規產品, 目標應用主打汽車數字鑰匙
- Vishay 推出的27款600 V標準整流器和60 V - 200 V TMBS?整流器
- 泰克亮相2025 慕尼黑展: 以全棧式解決方案與中國智造同頻共振
- Nordic Semiconductor nRF9151 蜂窩物聯網模組與日本 IIJ SoftSIM產品相輔相成
- 汽車顯示屏——第2部分:TFT LCD、OLED和micro-LED顯示屏電源技術







 京公網安備 11010802033920號
京公網安備 11010802033920號