NOA(Navigation on Autopilot)作為高階自動(dòng)駕駛的核心功能,涵蓋高速智慧導(dǎo)航輔助駕駛、記憶行車/通勤模式及城區(qū)智慧導(dǎo)航輔助駕駛?cè)箢悺?p>
其實(shí)現(xiàn)依賴復(fù)雜的系統(tǒng)架構(gòu)與多模塊協(xié)同,我們從工程視角出發(fā),基于ISO 22737等國際標(biāo)準(zhǔn),深入剖析NOA的功能模塊,包括設(shè)計(jì)運(yùn)行范圍(ODD)、危險(xiǎn)工況識(shí)別、最小風(fēng)險(xiǎn)策略(MRM)、緊急停車及通勤模式設(shè)計(jì)等,并探討其狀態(tài)機(jī)設(shè)計(jì)與轉(zhuǎn)換邏輯。
通過對(duì)系統(tǒng)架構(gòu)與開發(fā)任務(wù)的系統(tǒng)性分析,揭示NOA在技術(shù)實(shí)現(xiàn)上的關(guān)鍵挑戰(zhàn)與解決方案,NOA技術(shù)正處于快速發(fā)展階段,其落地需平衡功能性、安全性與用戶體驗(yàn)。
01
NOA功能模塊解析:
從架構(gòu)到核心技術(shù)
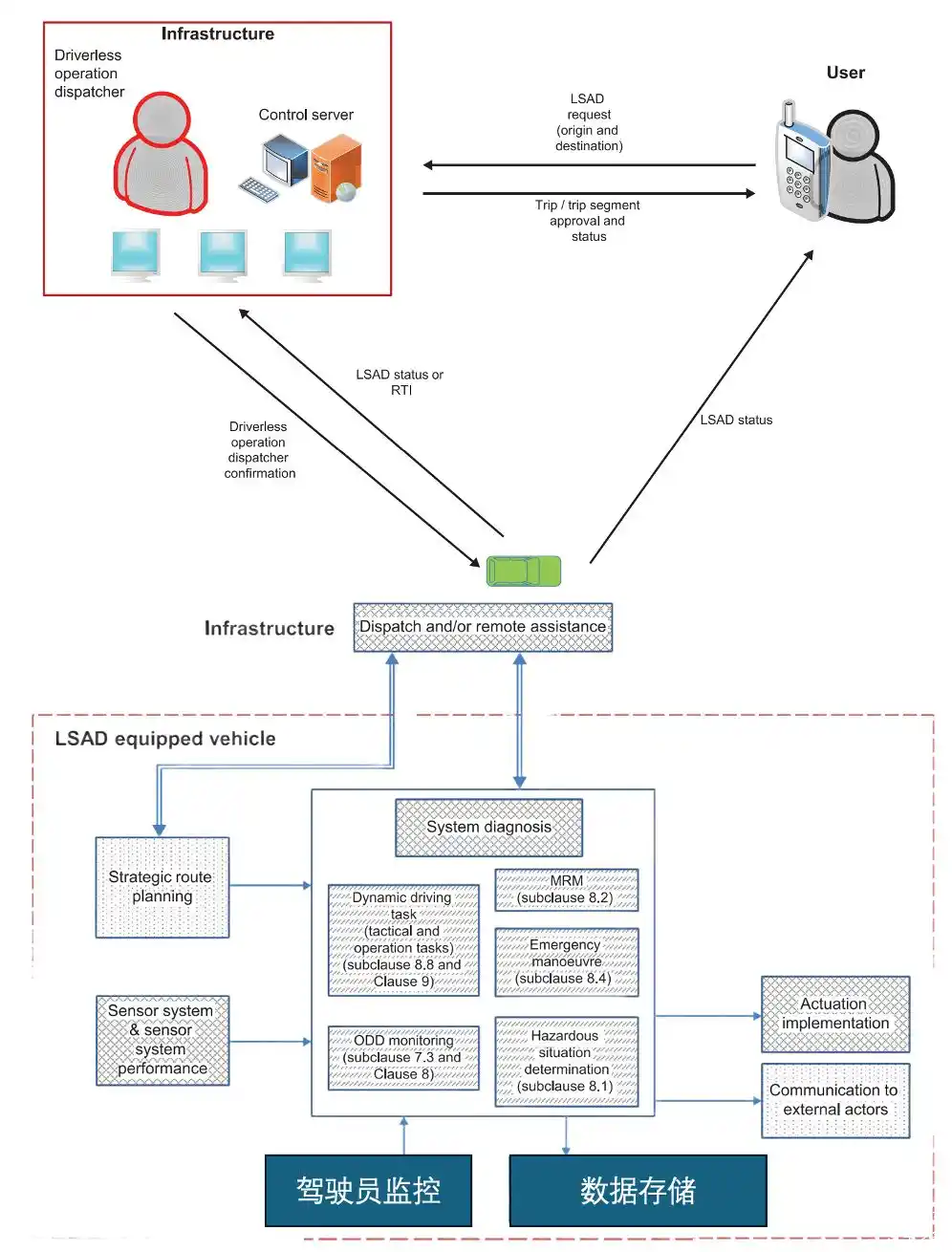
NOA作為高階自動(dòng)駕駛功能,系統(tǒng)架構(gòu)需整合多個(gè)子模塊以實(shí)現(xiàn)路徑規(guī)劃、環(huán)境感知與動(dòng)態(tài)駕駛?cè)蝿?wù)(DDT)的無縫執(zhí)行。
根據(jù)ISO 22737的參考框架,一個(gè)完整的自動(dòng)駕駛系統(tǒng)包括路徑規(guī)劃、感知識(shí)別、ODD監(jiān)測(cè)、動(dòng)態(tài)駕駛?cè)蝿?wù)、危險(xiǎn)工況識(shí)別、最小風(fēng)險(xiǎn)策略、緊急停車、控制執(zhí)行、駕駛員監(jiān)控、數(shù)據(jù)存儲(chǔ)及V2X通信等子模塊。
● 模塊相互協(xié)作,確保系統(tǒng)在復(fù)雜場(chǎng)景下的安全性和可靠性。
◎ 感知識(shí)別模塊通過激光雷達(dá)、攝像頭和毫米波雷達(dá)提供環(huán)境數(shù)據(jù),
◎ 路徑規(guī)劃模塊則基于高精地圖生成行駛軌跡,
◎ 而控制執(zhí)行模塊將規(guī)劃轉(zhuǎn)化為車輛的實(shí)際動(dòng)作。
備注:現(xiàn)在整個(gè)架構(gòu)被端到端和VLA開始取代,我們會(huì)從整個(gè)系統(tǒng)出發(fā),去討論過去和現(xiàn)在,還有未來的變化。
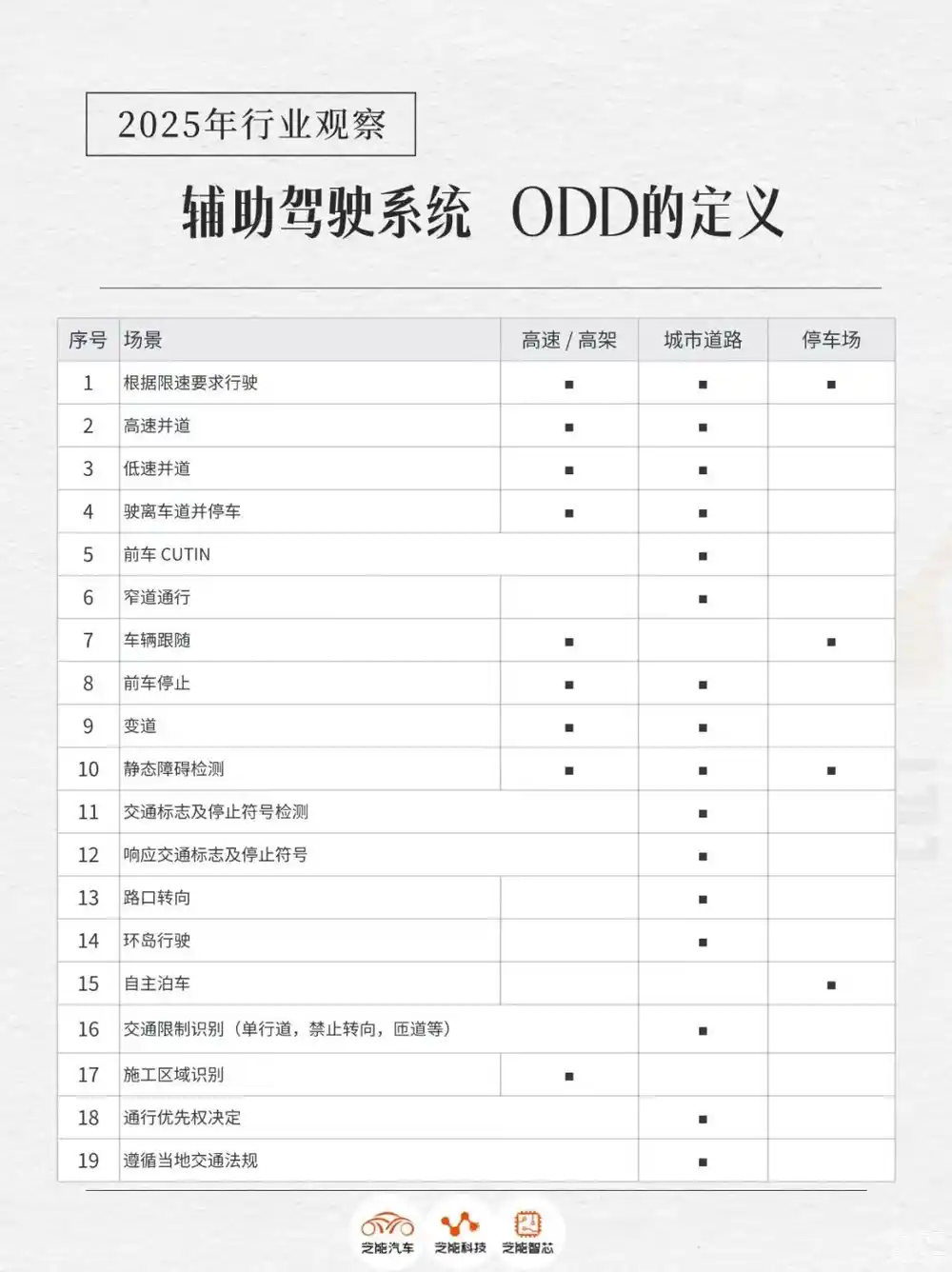
ODD是NOA功能設(shè)計(jì)的基石,明確系統(tǒng)適用的運(yùn)行條件是確保安全的前提。
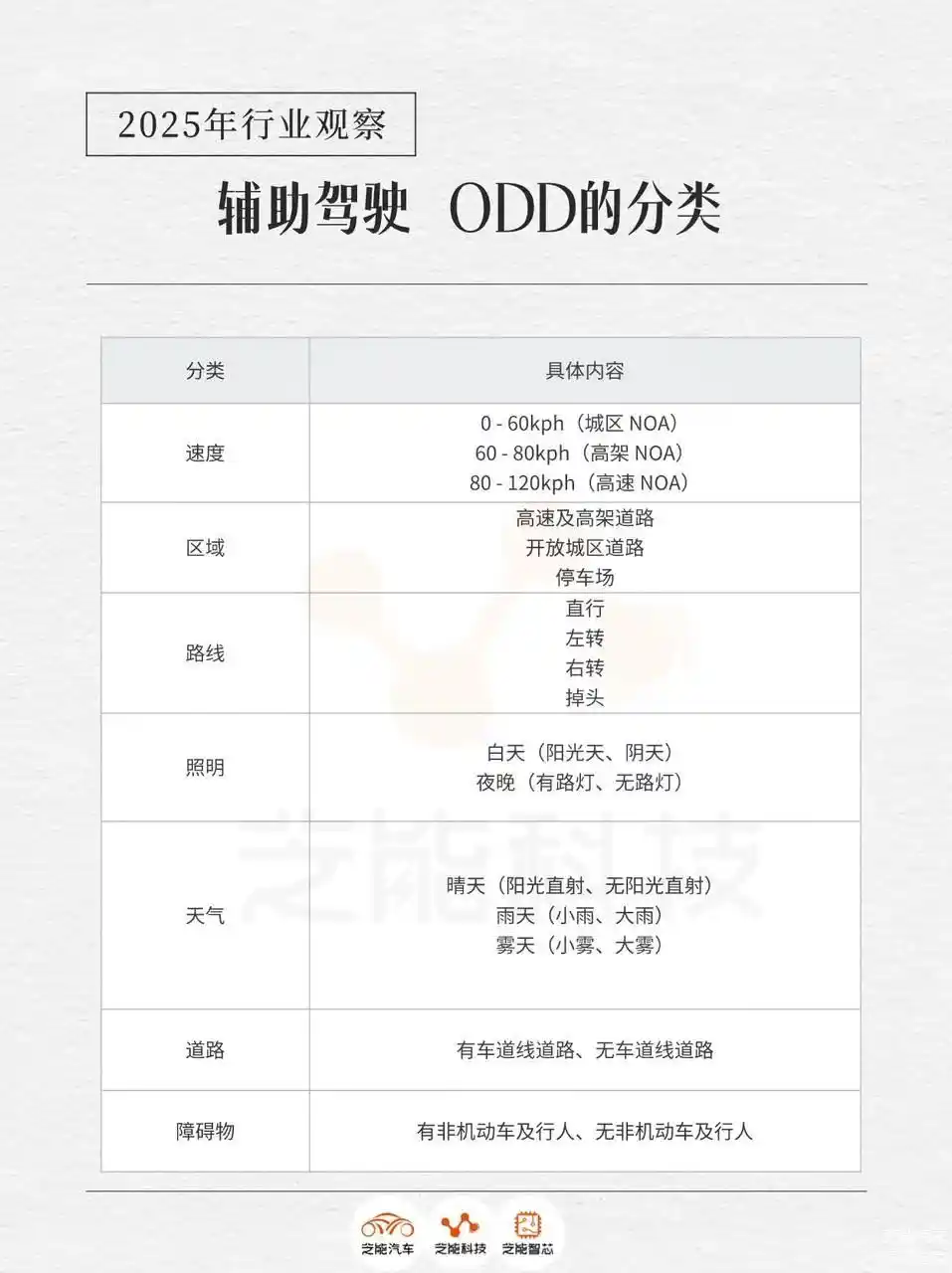
● ODD需涵蓋以下關(guān)鍵元素:
◎ 速度:如晴天限速80km/h,雨天降至60km/h,顛簸路面進(jìn)一步限制至40km/h。
◎ 區(qū)域:支持高速公路、城市主干道,但可能排除非鋪裝道路或狹窄巷道。
◎ 路線:預(yù)定義導(dǎo)航路徑,如通勤模式下的固定上下班路線。
◎ 照明:支持100-10,000 lux范圍,覆蓋白天至夜間人工照明場(chǎng)景。
◎ 天氣:適配晴天、小雨、中雨,暴雨或大霧可能超出ODD。
◎ 道路:要求清晰車道線、鋪裝路面,無嚴(yán)重沉陷或積水。
◎ 障礙物:識(shí)別行人、騎行者及靜態(tài)物體,如路障或停車車輛。
系統(tǒng)需實(shí)時(shí)監(jiān)測(cè)ODD狀態(tài),判斷是否處于設(shè)計(jì)范圍內(nèi),當(dāng)傳感器檢測(cè)到能見度因大霧降至ODD閾值以下時(shí),系統(tǒng)應(yīng)觸發(fā)退出機(jī)制。這種動(dòng)態(tài)監(jiān)測(cè)依賴高精度傳感器與實(shí)時(shí)數(shù)據(jù)處理,工程實(shí)現(xiàn)上需優(yōu)化算法以降低誤判率。
● NOA系統(tǒng)需實(shí)時(shí)識(shí)別危險(xiǎn)工況并采取規(guī)避措施。危險(xiǎn)工況分為無遮擋和有遮擋兩類:
◎ 無遮擋工況:如行人橫穿馬路或騎行者并行,系統(tǒng)需通過目標(biāo)檢測(cè)算法識(shí)別并預(yù)測(cè)其運(yùn)動(dòng)軌跡,結(jié)合剎車或變道規(guī)避。
◎ 有遮擋工況:如行人從車輛后方突然出現(xiàn),要求系統(tǒng)利用多傳感器融合(如激光雷達(dá)與攝像頭)增強(qiáng)感知能力。
ISO 22737規(guī)定系統(tǒng)必須應(yīng)對(duì)這些場(chǎng)景,工程實(shí)現(xiàn)上需設(shè)計(jì)魯棒的感知模型,確保在遮擋或低光照條件下的識(shí)別精度。此外,系統(tǒng)需向外部發(fā)出警告(如鳴笛或燈光閃爍),這對(duì)V2X通信的實(shí)時(shí)性提出更高要求。
● 當(dāng)NOA系統(tǒng)無法繼續(xù)執(zhí)行DDT時(shí),MRM被觸發(fā)以將車輛置于最小風(fēng)險(xiǎn)狀態(tài)(MRC)。觸發(fā)條件包括:
◎ 遇到無法處理的危險(xiǎn)工況(如多車混雜的復(fù)雜路口)。
◎ 系統(tǒng)故障(如傳感器失效)。
◎ V2X通信中斷。
◎ 即將超出ODD(如進(jìn)入未鋪裝道路)。
MRM執(zhí)行過程可能包括減速、在車道內(nèi)停車或變道至路邊停車,在高速公路上檢測(cè)到前方事故,系統(tǒng)可減速并靠邊停車,同時(shí)激活危險(xiǎn)燈。工程設(shè)計(jì)需確保MRM的平滑性,避免二次風(fēng)險(xiǎn),如突然剎車導(dǎo)致后車追尾。
● 緊急停車功能為用戶或調(diào)度員提供主動(dòng)干預(yù)手段。觸發(fā)場(chǎng)景包括:
◎ 乘客身體不適(如暈車)。
◎ 系統(tǒng)異常(如路徑偏離)。
◎ 車輛失去自動(dòng)駕駛能力(如硬件故障)。
實(shí)現(xiàn)上,緊急停車按鈕需集成至車內(nèi)顯眼位置,觸發(fā)后系統(tǒng)立即執(zhí)行減速并停止,伴隨外部警告信號(hào)。重新激活需駕駛員確認(rèn),確保系統(tǒng)完整性。此功能對(duì)人機(jī)交互設(shè)計(jì)提出要求,需兼顧便捷性與誤觸防范。
● 通勤模式是NOA的創(chuàng)新亮點(diǎn),通過記憶軌跡優(yōu)化日常駕駛,核心技術(shù)包括:
◎ 記憶軌跡錄制:記錄全局坐標(biāo)下的經(jīng)緯度點(diǎn)串,包含自車動(dòng)作(如轉(zhuǎn)向、剎車)及環(huán)境信息(如車道線位置)。
◎ 全局到局部轉(zhuǎn)換:將錄制軌跡與實(shí)時(shí)感知數(shù)據(jù)對(duì)齊,生成局部導(dǎo)航路徑。例如,利用SLAM(同步定位與建圖)技術(shù)校準(zhǔn)偏差。
◎ 軌跡追蹤:基于局部路徑,結(jié)合感知到的車道線和障礙物,執(zhí)行精確控制。
工程實(shí)現(xiàn)上,可采用傳統(tǒng)規(guī)則或AI模型生成導(dǎo)航軌跡,挑戰(zhàn)在于如何處理動(dòng)態(tài)環(huán)境變化,如道路施工或臨時(shí)障礙,需結(jié)合實(shí)時(shí)感知?jiǎng)討B(tài)調(diào)整軌跡。
02
NOA狀態(tài)機(jī)設(shè)計(jì):
邏輯與實(shí)現(xiàn)
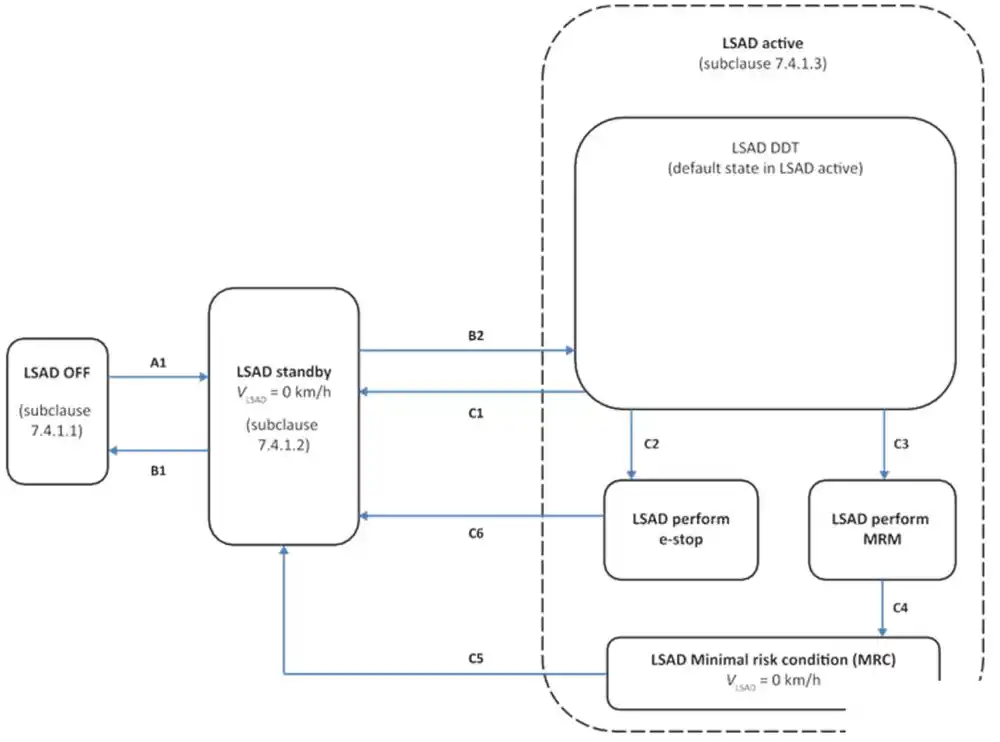
● NOA的狀態(tài)機(jī)設(shè)計(jì)依據(jù)ISO 22737標(biāo)準(zhǔn),包含OFF、Standby和Active三大狀態(tài)及若干子狀態(tài),旨在清晰定義各階段系統(tǒng)行為且避免功能重疊。
◎ OFF狀態(tài)下系統(tǒng)未激活,適用于車輛熄火或待機(jī);
◎ Standby狀態(tài)下系統(tǒng)處于待命,準(zhǔn)備激活,包括驗(yàn)證操作設(shè)計(jì)域(ODD)、建立通信并保持靜止;
◎ Active狀態(tài)執(zhí)行動(dòng)態(tài)駕駛?cè)蝿?wù)(DDT),進(jìn)一步分為默認(rèn)的DDT子狀態(tài)、緊急停車e-stop子狀態(tài)、最小風(fēng)險(xiǎn)策略MRM子狀態(tài)和最小風(fēng)險(xiǎn)MRC子狀態(tài)。
狀態(tài)轉(zhuǎn)換邏輯是系統(tǒng)運(yùn)行的核心,條件涵蓋從上電自檢通過后的A1(OFF到Standby)到駕駛員確認(rèn)解除緊急狀態(tài)后的C6(e-stop到Standby)。
此外,工程實(shí)現(xiàn)面臨實(shí)時(shí)性、魯棒性和用戶體驗(yàn)的挑戰(zhàn),要求狀態(tài)轉(zhuǎn)換迅速準(zhǔn)確、適應(yīng)傳感器噪聲或通信中斷,并確保平滑的狀態(tài)切換與及時(shí)的用戶反饋。
為此,采用有限狀態(tài)機(jī)框架結(jié)合實(shí)時(shí)操作系統(tǒng),以及高性能計(jì)算平臺(tái)來支持復(fù)雜的感知與決策算法顯得尤為重要。整個(gè)設(shè)計(jì)需保證在各種條件下安全有效地完成狀態(tài)間的轉(zhuǎn)換,以提升自動(dòng)駕駛系統(tǒng)的可靠性與用戶體驗(yàn)。
小結(jié)NOA是自主駕駛的開端,從ODD定義到危險(xiǎn)工況識(shí)別,再到MRM與通勤模式的創(chuàng)新,NOA系統(tǒng)需在感知、決策與控制層面實(shí)現(xiàn)精準(zhǔn)協(xié)同,工程實(shí)踐仍面臨諸多挑戰(zhàn)。
上一篇: 雙強(qiáng)聯(lián)手,地平線與大眾汽車集團(tuán)開啟高階智駕合作新征程
下一篇:最后一頁
 數(shù)字電子技術(shù)基礎(chǔ)
數(shù)字電子技術(shù)基礎(chǔ) LM111J
LM111J
- 超快充技術(shù)平權(quán)時(shí)代,要來了
- 高階智駕NOA功能解析:技術(shù)架構(gòu)與實(shí)現(xiàn)路徑
- 億緯鋰能大圓柱電池進(jìn)展:良率突破97%
- 500Wh/kg電池競(jìng)速:鋰金屬電池挑戰(zhàn)全固態(tài)共識(shí)?(下)
- 500Wh/kg電池競(jìng)速:鋰金屬電池挑戰(zhàn)全固態(tài)共識(shí)?(上)
- 密歇根大學(xué)突破:低溫充電速度提升500%
- 谷歌發(fā)布Android Auto 14.0更新,界面優(yōu)化并準(zhǔn)備車機(jī)版Gemini AI
- 感知融合如何讓自動(dòng)駕駛汽車“看”世界更清晰?
- 汽車電子硬件開發(fā)常用的安全機(jī)制
- EVAL-ADN2850-25,用于 ADN2850 雙通道、1024 位、非易失性存儲(chǔ)器數(shù)字電位器的評(píng)估板
- DN91,同步整流提高機(jī)頂盒電源效率
- 使用 Microchip Technology 的 LR8N3GP002 的參考設(shè)計(jì)
- #第四屆立創(chuàng)大賽#智能小車
- 用于儀表的 24 位 ADC 稱重系統(tǒng)
- 明日方舟 萊茵生命主題NFC卡/飯卡
- 反激式開關(guān)電源100~240Vac轉(zhuǎn)12V 2A,外置MOS分立方案,芯片用OB2263或其替代型號(hào)
- USB接收器外殼Badusb
- 使用 Diodes Incorporated 的 PT8A3519 的參考設(shè)計(jì)
- CN0301






- Poly博詣帶來全新的可靠、高性價(jià)比的Voyager專業(yè)耳機(jī)
- 一文了解《汽車駕駛自動(dòng)化分級(jí)》(GB/T 40429-2021)
- 戴姆勒卡車CEO:關(guān)鍵芯片供應(yīng)緊張進(jìn)一步加劇了
- 繼電保護(hù)測(cè)試儀的發(fā)展歷程_繼電保護(hù)測(cè)試儀的分類有哪些
- 智能汽車網(wǎng)絡(luò)安全問題逐漸浮出水面,車輛被遠(yuǎn)程操控并非天方夜譚
- 關(guān)于飛思卡爾xs128的IO端口
- 低頻前置放大器的三種耦合方式
- 智能鎖的安全性能是否漏洞百出?
- 英飛凌推出新一代雙通道隔離柵極驅(qū)動(dòng)器IC,提升SMPS設(shè)計(jì)的系統(tǒng)性能
- LPC824-SPI接口(續(xù)二)
- 超快充技術(shù)平權(quán)時(shí)代,要來了
- 智元機(jī)器人與Physical Intelligence(Pi)達(dá)成戰(zhàn)略合作
- 不到10萬塊!特斯拉再次面臨生死狙擊?
- 高階智駕NOA功能解析:技術(shù)架構(gòu)與實(shí)現(xiàn)路徑
- 智能體爆發(fā)元年,誰在“無人區(qū)”繪制地形圖?
- 億緯鋰能大圓柱電池進(jìn)展:良率突破97%
- 500Wh/kg電池競(jìng)速:鋰金屬電池挑戰(zhàn)全固態(tài)共識(shí)?(下)
- 500Wh/kg電池競(jìng)速:鋰金屬電池挑戰(zhàn)全固態(tài)共識(shí)?(上)
- 密歇根大學(xué)突破:低溫充電速度提升500%
- 谷歌發(fā)布Android Auto 14.0更新,界面優(yōu)化并準(zhǔn)備車機(jī)版Gemini AI
- TE 智能電表特訓(xùn)營(yíng),產(chǎn)品、技術(shù)、市場(chǎng)全解鎖!
- 逛東芝電子在線展會(huì),上百份禮品等您拿!
- 有獎(jiǎng)直播:低功耗、小尺寸&高溫環(huán)境、帶觸摸功能——瑞薩電子最新16位RL78/G系列單片機(jī)介紹
- 填問卷,解鎖贏好禮!看泰克MDO4000C如何進(jìn)行電源分析!
- EEWORLD社區(qū)版主公開招募ing
- 玩兒轉(zhuǎn)電源游戲,贏取800元TI手持POS機(jī)開發(fā)套件!
- 開工大吉,搶樓有禮!預(yù)測(cè):2021年電子熱門關(guān)鍵詞
- 一道題,測(cè)試你是不是MSP430的真愛粉兒~
- 正點(diǎn)原子STM32學(xué)習(xí)筆記——通用定時(shí)器基本原理
- 正點(diǎn)原子STM32學(xué)習(xí)筆記——MPU6050介紹
- STM32系統(tǒng)定時(shí)器(SysTick)筆記
- 以MES系統(tǒng)蹚入數(shù)字化深水區(qū)
- STM32F10xx外設(shè)GPIO模式配置
- 中國動(dòng)力電池行業(yè)社會(huì)責(zé)任發(fā)展指數(shù)首發(fā)|LG新能源榮登指數(shù)榜首
- 國內(nèi)首個(gè)調(diào)峰容量市場(chǎng)在華北電網(wǎng)啟動(dòng)
- 大國工程!白鶴灘送江蘇特高壓輸電工程順利跨越長(zhǎng)江
- 西藏拉薩換流站首臺(tái)調(diào)相機(jī)組投運(yùn)
- 受持續(xù)寒潮影響西藏電網(wǎng)用電負(fù)荷不斷攀升 國網(wǎng)西南分部及時(shí)優(yōu)化調(diào)度







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)