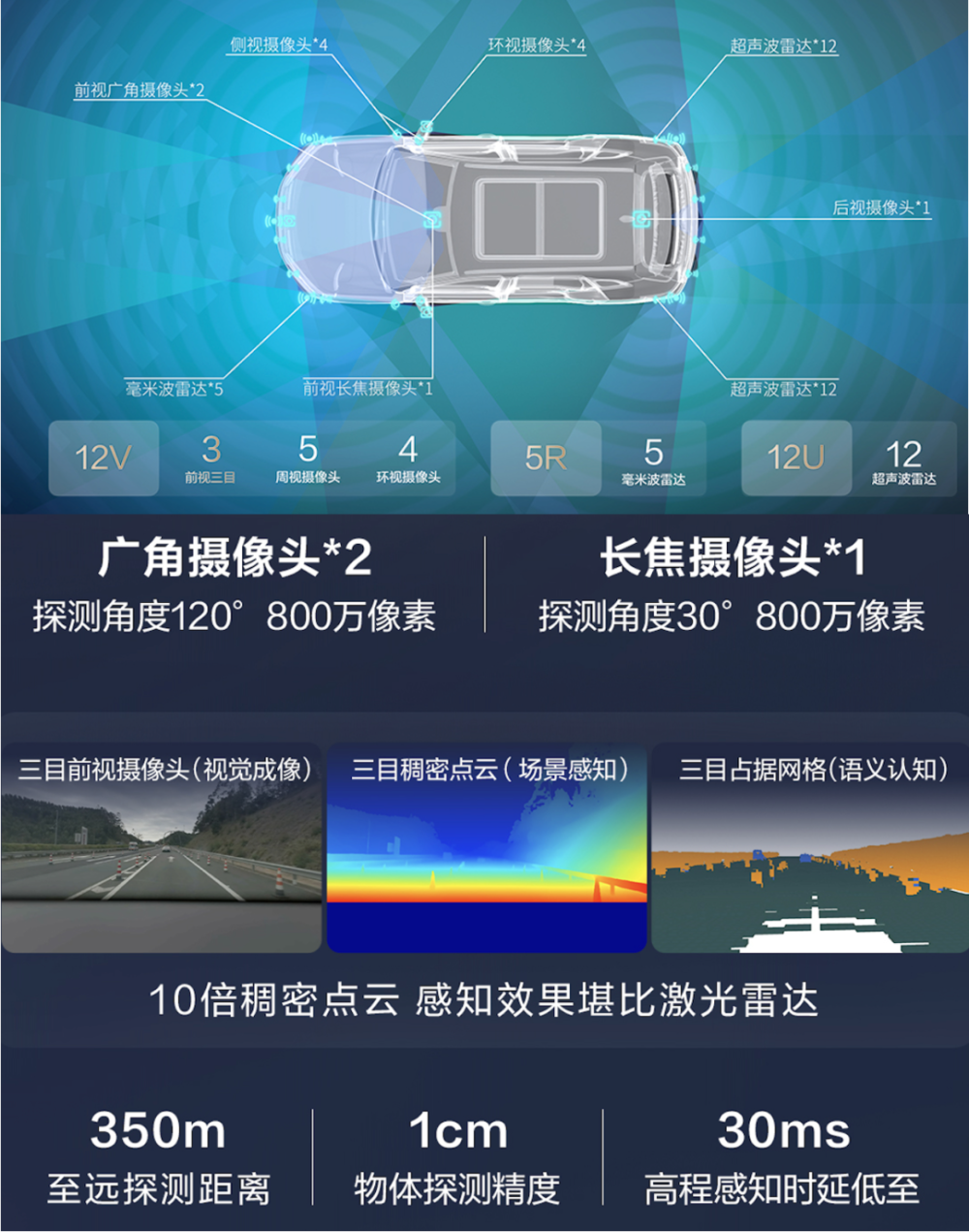
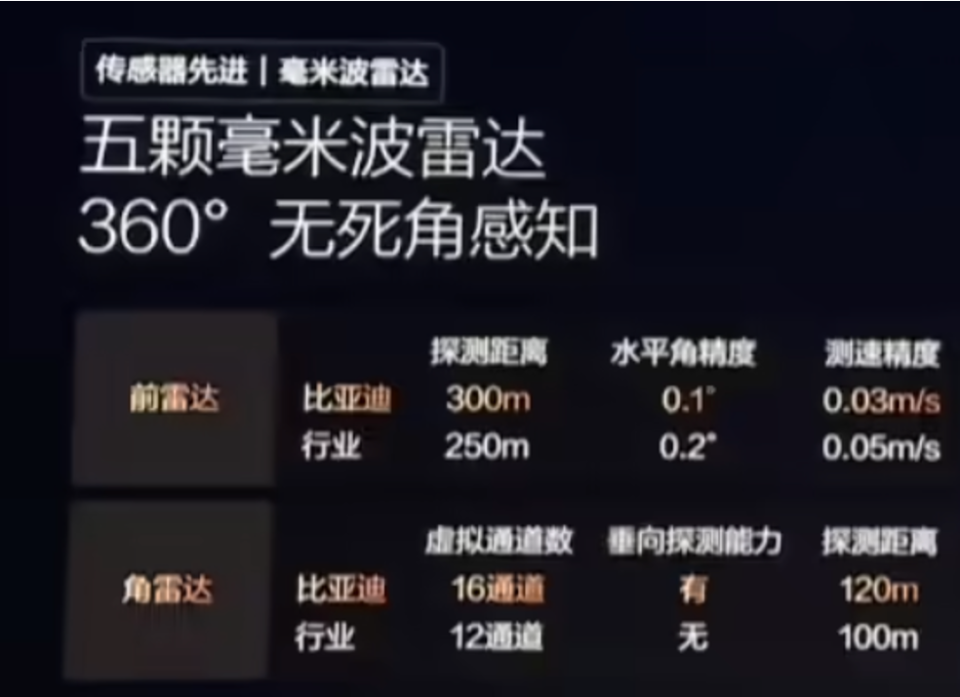
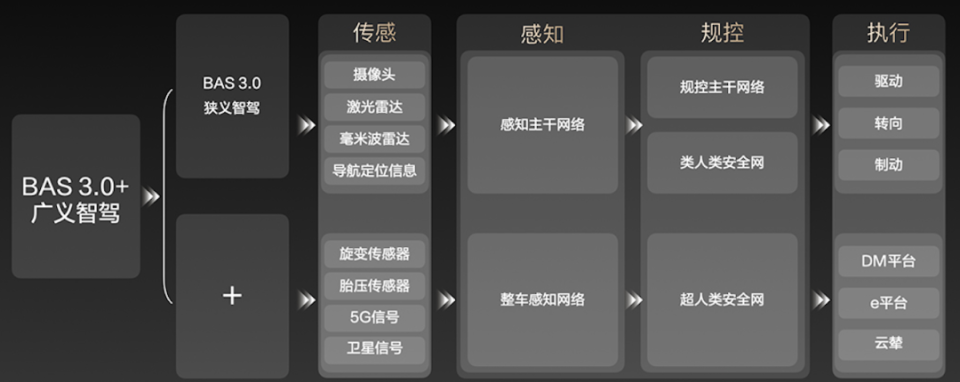
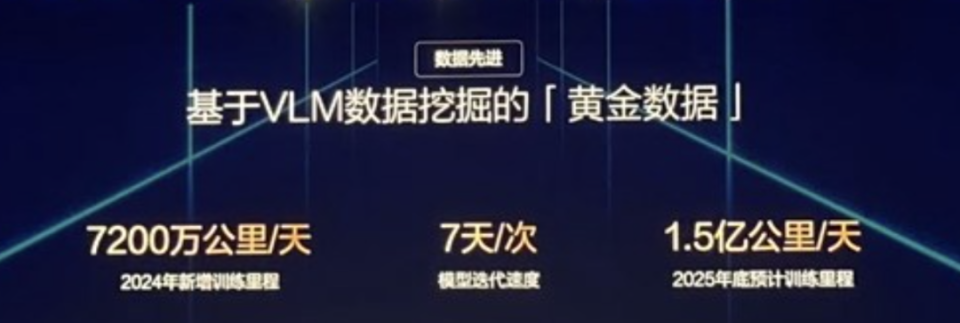
昨天比亞迪智能化戰略發布中最炸裂的,是比亞迪“天神之眼 C - 高階智駕三目版(DiPilot 100)”,不是技術多么高精尖,而是覆蓋了眾多的比亞迪車型。通過結合前視三目5R12V12U、BAS 3.0+行泊車算法以及以VLM數據為核心的“黃金數據”技術,天神之眼 C為智能駕駛系統的安全性、舒適性和高效性提供了強有力的保障,基于比亞迪自主研發的璇璣架構,采用全閉環端到端設計,在傳感器、算法和數據處理等方面都實現了行業領先的創新。我們將圍繞該系統的技術底座和四大核心優勢展開分析,做一些細節的探討。璇璣架構作為“天神之眼 C”的技術基礎,通過“一腦、兩端、三網、四鏈”的設計理念,實現了整車智能的全面升級。璇璣架構不僅在硬件層面具備了強大的計算能力,還通過高效的數據處理和傳輸體系,提升了系統的響應速度和可靠性。比亞迪的整車智能架構具備100%的自主知識產權,使得其在智能駕駛領域的技術壁壘愈加堅固。璇璣架構的創新之處在于其實現了全閉環端到端的控制模式,將車載傳感器、控制器、執行器等核心技術進行了深度整合,極大提升了智能駕駛系統的協同效能,提高了系統的處理能力,還減少了信息傳輸的延遲,確保智能駕駛決策更加迅速和精準。通過這一架構,比亞迪的智能駕駛系統能夠在動態復雜的道路環境中做出實時反應,保障駕駛安全。“天神之眼 C”在技術層面主要涵蓋了智能駕駛的傳感器、控制器和執行器等領域,實現了感知、規劃、控制到執行的全面融合。例如,在控制方面,通過AI算法和中央大腦的協調,能夠做出最優決策,響應時延縮短至10毫秒,集成度更高,控制響應更加迅速。比亞迪的前視三目傳感器系統(5R12V12U)“二郎神”前視三目設計,系統能夠在各種復雜的駕駛環境中實現精準的感知。前視三目由兩顆120°的廣角攝像頭和一顆30°的長焦攝像頭組成,這些攝像頭不僅能探測遠距離的物體,還能精確測量物體的高度、寬度和深度,最大探測距離可達到350米。這使得系統在高速行車中能夠及時預判前方道路狀況,并根據實時數據做出反應,顯著提升了行車安全性,結合毫米波雷達和超聲波雷達,能夠在多重傳感器的協同作用下,實現360°無死角的全方位感知。毫米波雷達的應用是“天神之眼 C”中非常重要的一個環節,其不受光照條件影響,能夠在黑夜、霧霾等惡劣環境中仍然精確感知障礙物的位置與運動軌跡。比亞迪通過對前毫米波雷達的優化,提升了其探測距離至300米,角度精度達0.1度,確保在復雜環境中依然能夠做出快速反應。借助雷達的多通道設計,系統還能進一步提升對小物體的檢測率,彌補視覺感知的不足。在泊車場景中,超聲波雷達和環視攝像頭相結合,提供了精準的障礙物識別功能,支持精確到2厘米的停車精度。● 五顆毫米波雷達,前雷達探測距離 300m、水平角精度 0.1°、測速精度 0.03m/s;后雷達探測距離 120m。● 12 超聲波雷達傳感器精度 1 cm,泊車精度 2 cm。比亞迪自研的BAS 3.0系統再次迎來重大升級,感知主干網和規控主干網實現了全面進化,采用了三目立體視差多模態BEV(Bird's Eye View)感知主干網,通過三目立體視差技術顯著提升了前視感知的精度。同時多模態BEV高效融合了來自多個傳感器的數據,確保在各種天氣條件下都能實現穩定且高精度的環境感知,從而大幅提升行車和泊車的安全性。規控主干網引入了擬人規劃與全閉環控制機制,并通過主動安全協同進一步優化駕駛體驗,能夠從云端挖掘并學習大量老司機的駕駛習慣,實現算法與執行器之間的軟硬件閉環、協同優化。借助影子模式收集的海量數據,主動安全子網得以持續迭代更新,最終帶來更加擬人化、低延遲以及高度安全的智能駕駛體驗。“天神之眼 C”不僅僅依賴傳統的傳感器數據,“黃金數據”系統基于VLM(Visual Learning Model)數據挖掘技術,能夠通過對海量數據的分析與學習,提升系統的感知能力。系統通過云端大模型的學習能力,能夠不斷優化其對場景的理解與預判能力,數據驅動的技術,使得“天神之眼 C”在面對復雜、未知的場景時,依然能夠做出準確的反應,保證系統的高效性與安全性。“天神之眼 C - 高階智駕三目版(DiPilot 100)”整體的邏輯出現了很大的變化。


 操作系統真相還原
操作系統真相還原 NJU7054V-(TE2)
NJU7054V-(TE2)













 京公網安備 11010802033920號
京公網安備 11010802033920號