



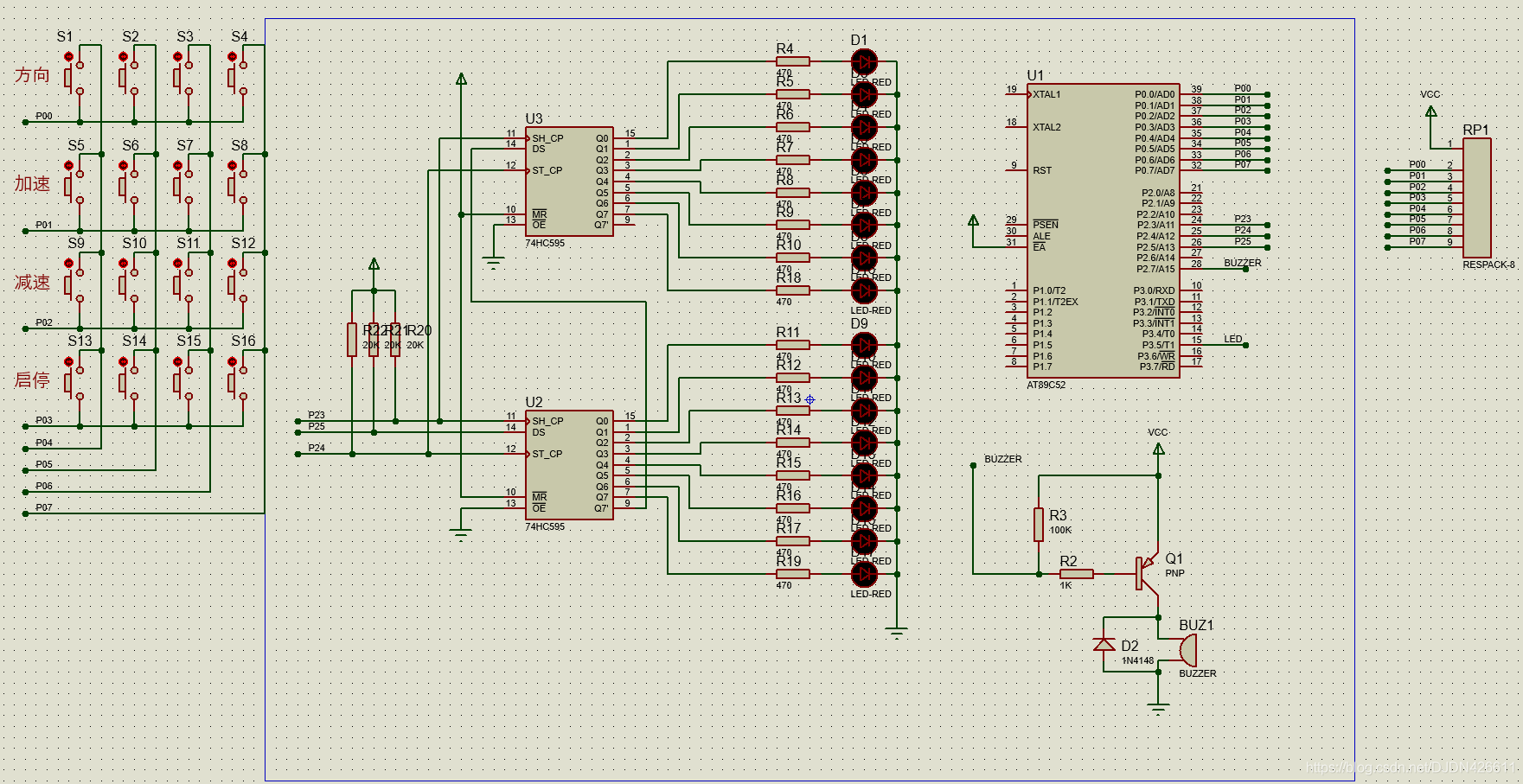
一、使用proteus繪制簡單的電路圖,用于后續(xù)仿真
二、編寫程序
/********************************************************************************************************************
---- @Project: LED-74HC595
---- @File: main.c
---- @Edit: ZHQ
---- @Version: V1.0
---- @CreationTime: 20200529
---- @ModifiedTime: 20200529
---- @Description: 第1個至第8個LED燈一直不亮。在第9個至第16個LED燈,依次逐個
---- 亮燈并且每次只能亮一個燈。每按一次獨(dú)立按鍵S13鍵,原來運(yùn)行的跑馬燈會暫停,原
---- 來暫停的跑馬燈會運(yùn)行。用S1來改變方向,用S5和S9來改變速度。
---- 單片機(jī):AT89C52
********************************************************************************************************************/
#include "reg52.h"
/*——————宏定義——————*/
#define FOSC 11059200L
#define T1MS (65536-FOSC/12/1000) /*1ms timer calculation method in 12Tmode*/
#define const_voice_short 80 /*蜂鳴器短叫的持續(xù)時間*/
#define const_key_time1 40
#define const_key_time2 40
#define const_key_time3 40
#define const_key_time4 40
/*——————變量函數(shù)定義及聲明——————*/
/*定義74HC595*/
sbit Hc595_Sh = P2^3;
sbit Hc595_St = P2^4;
sbit Hc595_Ds = P2^5;
/*定義蜂鳴器*/
sbit Beep = P2^7;
/*定義按鍵*/
sbit Key_S1 = P0^0; /*定義按鍵S1,對應(yīng)S1*/
sbit Key_S2 = P0^1; /*定義按鍵S2,對應(yīng)S5*/
sbit Key_S3 = P0^2; /*定義按鍵S3,對應(yīng)S9*/
sbit Key_S4 = P0^3; /*定義按鍵S4,對應(yīng)S13*/
sbit Key_Gnd = P0^4; /*定義按鍵模擬地*/
unsigned char ucLED1 = 0; /*代表16個燈的亮滅狀態(tài),0代表滅,1代表亮*/
unsigned char ucLED2 = 0;
unsigned char ucLED3 = 0;
unsigned char ucLED4 = 0;
unsigned char ucLED5 = 0;
unsigned char ucLED6 = 0;
unsigned char ucLED7 = 0;
unsigned char ucLED8 = 0;
unsigned char ucLED9 = 0;
unsigned char ucLED10 = 0;
unsigned char ucLED11 = 0;
unsigned char ucLED12 = 0;
unsigned char ucLED13 = 0;
unsigned char ucLED14 = 0;
unsigned char ucLED15 = 0;
unsigned char ucLED16 = 0;
unsigned char ucLed_update = 0; /*刷新變量。每次更改LED燈的狀態(tài)都要更新一次。*/
unsigned char ucLedStep_01_08 = 0; /*第1個至第8個LED跑馬燈的步驟變量*/
unsigned int uiTimeCnt_01_08 = 0; /*第1個至第8個LED跑馬燈的統(tǒng)計(jì)定時中斷次數(shù)的延時計(jì)數(shù)器*/
unsigned char ucLedStep_09_16 = 0; /*第9個至第16個LED跑馬燈的步驟變量*/
unsigned int uiTimeCnt_09_16 = 0; /*第9個至第16個LED跑馬燈的統(tǒng)計(jì)定時中斷次數(shù)的延時計(jì)數(shù)器*/
unsigned char ucLedStatus16_09 = 0; /*代表底層74HC595輸出狀態(tài)的中間變量*/
unsigned char ucLedStatus08_01 = 0; /*代表底層74HC595輸出狀態(tài)的中間變量*/
unsigned char ucKeySec = 0; /*被觸發(fā)的按鍵編號*/
unsigned int uiKeyTimeCnt1 = 0; /*按鍵去抖動延時計(jì)數(shù)器*/
unsigned char ucKeyLock2 = 0; /*按鍵觸發(fā)后自鎖的變量標(biāo)志*/
unsigned int uiKeyTimeCnt2 = 0; /*按鍵去抖動延時計(jì)數(shù)器*/
unsigned char ucKeyLock3 = 0; /*按鍵觸發(fā)后自鎖的變量標(biāo)志*/
unsigned int uiKeyTimeCnt3 = 0; /*按鍵去抖動延時計(jì)數(shù)器*/
unsigned char ucKeyLock1 = 0; /*按鍵觸發(fā)后自鎖的變量標(biāo)志*/
unsigned int uiKeyTimeCnt4 = 0; /*按鍵去抖動延時計(jì)數(shù)器*/
unsigned char ucKeyLock4 = 0; /*按鍵觸發(fā)后自鎖的變量標(biāo)志*/
unsigned int uiVoiceCnt = 0; /*蜂鳴器鳴叫的持續(xù)時間計(jì)數(shù)器*/
unsigned int uiSetTimeLevel_09_16 = 300; /*速度變量,此數(shù)值越大速度越慢,此數(shù)值越小速度越快。*/
unsigned char ucLedDirFlag = 0; /*方向變量,把按鍵與跑馬燈關(guān)聯(lián)起來的核心變量,0代表正方向,1代表反方向*/
unsigned char ucLedStartFlag = 1; /*啟動和暫停的變量,0代表暫停,1代表啟動*/
/**
* @brief 定時器0初始化函數(shù)
* @param 無
* @retval 初始化T0
**/
void Init_T0(void)
{
TMOD = 0x01; /*set timer0 as mode1 (16-bit)*/
TL0 = T1MS; /*initial timer0 low byte*/
TH0 = T1MS >> 8; /*initial timer0 high byte*/
}
/**
* @brief 外圍初始化函數(shù)
* @param 無
* @retval 初始化外圍
**/
void Init_Peripheral(void)
{
ET0 = 1;/*允許定時中斷*/
TR0 = 1;/*啟動定時中斷*/
EA = 1;/*開總中斷*/
}
/**
* @brief 初始化函數(shù)
* @param 無
* @retval 初始化單片機(jī)
**/
void Init(void)
{
Key_Gnd = 0;
Beep = 1;
Init_T0();
}
/**
* @brief 延時函數(shù)
* @param 無
* @retval 無
**/
void Delay_Long(unsigned int uiDelayLong)
{
unsigned int i;
unsigned int j;
for(i=0;i for(j=0;j<500;j++) /*內(nèi)嵌循環(huán)的空指令數(shù)量*/ { ; /*一個分號相當(dāng)于執(zhí)行一條空語句*/ } } } /** * @brief 延時函數(shù) * @param 無 * @retval 無 **/ void Delay_Short(unsigned int uiDelayShort) { unsigned int i; for(i=0;i ; /*一個分號相當(dāng)于執(zhí)行一條空語句*/ } } /** * @brief 掃描按鍵 * @param 無 * @retval 放在定時中斷里 **/ void Key_Scan(void) { if(Key_S1 == 1) /*IO是高電平,說明按鍵沒有被按下,這時要及時清零一些標(biāo)志位*/ { ucKeyLock1 = 0; uiKeyTimeCnt1 = 0; } else if(ucKeyLock1 == 0) /*有按鍵按下,且是第一次被按下*/ { uiKeyTimeCnt1 ++; /*累加定時中斷次數(shù)*/ if(uiKeyTimeCnt1 > const_key_time1) { uiKeyTimeCnt1 = 0; ucKeyLock1 = 1; /*自鎖按鍵置位,避免一直觸發(fā)*/ ucKeySec = 1; } } if(Key_S2 == 1) /*IO是高電平,說明按鍵沒有被按下,這時要及時清零一些標(biāo)志位*/ { ucKeyLock2 = 0; uiKeyTimeCnt2 = 0; } else if(ucKeyLock2 == 0) /*有按鍵按下,且是第一次被按下*/ { uiKeyTimeCnt2 ++; /*累加定時中斷次數(shù)*/ if(uiKeyTimeCnt2 > const_key_time2) { uiKeyTimeCnt2 = 0; ucKeyLock2 = 1; /*自鎖按鍵置位,避免一直觸發(fā)*/ ucKeySec = 2; } } if(Key_S3 == 1) /*IO是高電平,說明按鍵沒有被按下,這時要及時清零一些標(biāo)志位*/ { ucKeyLock3 = 0; uiKeyTimeCnt3 = 0; } else if(ucKeyLock3 == 0) /*有按鍵按下,且是第一次被按下*/ { uiKeyTimeCnt3 ++; /*累加定時中斷次數(shù)*/ if(uiKeyTimeCnt3 > const_key_time3) { uiKeyTimeCnt3 = 0; ucKeyLock3 = 1; /*自鎖按鍵置位,避免一直觸發(fā)*/ ucKeySec = 3; } } if(Key_S4 == 1) /*IO是高電平,說明按鍵沒有被按下,這時要及時清零一些標(biāo)志位*/ { ucKeyLock4 = 0; uiKeyTimeCnt4 = 0; } else if(ucKeyLock4 == 0) /*有按鍵按下,且是第一次被按下*/ { uiKeyTimeCnt4 ++; /*累加定時中斷次數(shù)*/ if(uiKeyTimeCnt4 > const_key_time4) { uiKeyTimeCnt4 = 0; ucKeyLock4 = 1; /*自鎖按鍵置位,避免一直觸發(fā)*/ ucKeySec = 4; } } } /** * @brief 按鍵服務(wù)的應(yīng)用程序 * @param 無 * @retval 無 **/ void Key_Service(void) { switch(ucKeySec) /*按鍵服務(wù)狀態(tài)切換*/ { case 1: /*改變跑馬燈方向的按鍵,對應(yīng)S1*/ if(ucLedDirFlag == 0) /*通過中間變量改變跑馬燈的方向*/ { ucLedDirFlag = 1; } else { ucLedDirFlag = 0; } uiVoiceCnt = const_voice_short; /*按鍵聲音觸發(fā),滴一聲就停。*/ ucKeySec = 0; /*響應(yīng)按鍵服務(wù)處理程序后,按鍵編號清零,避免一致觸發(fā)*/ break; case 2: if(uiSetTimeLevel_09_16 >= 50) { uiSetTimeLevel_09_16 = uiSetTimeLevel_09_16 - 10; } else /*最快限定在50*/ { uiSetTimeLevel_09_16 = 50; } uiVoiceCnt = const_voice_short; ucKeySec = 0; break; case 3: if(uiSetTimeLevel_09_16 <= 550) { uiSetTimeLevel_09_16 = uiSetTimeLevel_09_16 + 10; } else /*最快限定在550*/ { uiSetTimeLevel_09_16 = 550; } uiVoiceCnt = const_voice_short; ucKeySec = 0; break; case 4: if(ucLedStartFlag == 1) /*啟動和暫停兩種狀態(tài)循環(huán)切換*/ { ucLedStartFlag = 0; } else { ucLedStartFlag = 1; } uiVoiceCnt = const_voice_short; ucKeySec = 0; break; } } /** * @brief 595驅(qū)動函數(shù) * @param 無 * @retval * 兩個聯(lián)級74HC595的工作過程: * 每個74HC595內(nèi)部都有一個8位的寄存器,兩個聯(lián)級起來就有兩個寄存器。ST引腳就相當(dāng)于一個刷新 * 信號引腳,當(dāng)ST引腳產(chǎn)生一個上升沿信號時,就會把寄存器的數(shù)值輸出到74HC595的輸出引腳并且鎖存起來, * DS是數(shù)據(jù)引腳,SH是把新數(shù)據(jù)送入寄存器的時鐘信號。也就是說,SH引腳負(fù)責(zé)把數(shù)據(jù)送入到寄存器里,ST引腳 * 負(fù)責(zé)把寄存器的數(shù)據(jù)更新輸出到74HC595的輸出引腳上并且鎖存起來。 **/ void HC595_Drive(unsigned char ucLedStatusTemp16_09, unsigned char ucLedStatusTemp08_01) { unsigned char i; unsigned char ucTempData; Hc595_Sh = 0; Hc595_St = 0; ucTempData = ucLedStatusTemp16_09; /*先送高8位*/ for(i = 0; i < 8; i ++) { if(ucTempData >= 0x80) { Hc595_Ds = 1; } else { Hc595_Ds = 0; } Hc595_Sh = 0; /*SH引腳的上升沿把數(shù)據(jù)送入寄存器*/ Delay_Short(15); Hc595_Sh = 1; Delay_Short(15); ucTempData = ucTempData <<1; } ucTempData = ucLedStatusTemp08_01; /*再先送低8位*/ for(i = 0; i < 8; i ++) { if(ucTempData >= 0x80) { Hc595_Ds = 1; } else { Hc595_Ds = 0; } Hc595_Sh = 0; /*SH引腳的上升沿把數(shù)據(jù)送入寄存器*/ Delay_Short(15); Hc595_Sh = 1; Delay_Short(15); ucTempData = ucTempData <<1; } Hc595_St = 0; /*ST引腳把兩個寄存器的數(shù)據(jù)更新輸出到74HC595的輸出引腳上并且鎖存起來*/ Delay_Short(15); Hc595_St = 1; Delay_Short(15); Hc595_Sh = 0; /*拉低,抗干擾就增強(qiáng)*/ Hc595_St = 0; Hc595_Ds = 0; } /** * @brief LED更新函數(shù) * @param 無 * @retval * 把74HC595驅(qū)動程序翻譯成類似單片機(jī)IO口直接驅(qū)動方式的過程。 * 每次更新LED輸出,記得都要把ucLed_update置1表示更新。 **/ void LED_Update() { if(ucLed_update == 1) { ucLed_update = 0; /*及時清零,讓它產(chǎn)生只更新一次的效果,避免一直更新。*/ if(ucLED1 == 1) { ucLedStatus08_01 = ucLedStatus08_01 | 0x01; } else { ucLedStatus08_01 = ucLedStatus08_01 & 0xfe; } if(ucLED2 == 1) { ucLedStatus08_01 = ucLedStatus08_01 | 0x02; } else { ucLedStatus08_01 = ucLedStatus08_01 & 0xfd; } if(ucLED3 == 1) { ucLedStatus08_01 = ucLedStatus08_01 | 0x04; } else { ucLedStatus08_01 = ucLedStatus08_01 & 0xfb; } if(ucLED4 == 1) { ucLedStatus08_01 = ucLedStatus08_01 | 0x08; } else { ucLedStatus08_01 = ucLedStatus08_01 & 0xf7; } if(ucLED5 == 1) { ucLedStatus08_01 = ucLedStatus08_01 | 0x10; } else { ucLedStatus08_01 = ucLedStatus08_01 & 0xef; } if(ucLED6 == 1) { ucLedStatus08_01 = ucLedStatus08_01 | 0x20; } else { ucLedStatus08_01 = ucLedStatus08_01 & 0xdf; } if(ucLED7 == 1) { ucLedStatus08_01 = ucLedStatus08_01 | 0x40; } else { ucLedStatus08_01 = ucLedStatus08_01 & 0xbf; } if(ucLED8 == 1) { ucLedStatus08_01 = ucLedStatus08_01 | 0x80; } else { ucLedStatus08_01 = ucLedStatus08_01 & 0x7f; } if(ucLED9 == 1) { ucLedStatus16_09 = ucLedStatus16_09 | 0x01; } else { ucLedStatus16_09 = ucLedStatus16_09 & 0xfe; } if(ucLED10 == 1) { ucLedStatus16_09 = ucLedStatus16_09 | 0x02; } else { ucLedStatus16_09 = ucLedStatus16_09 & 0xfd; } if(ucLED11 == 1) { ucLedStatus16_09 = ucLedStatus16_09 | 0x04; } else { ucLedStatus16_09 = ucLedStatus16_09 & 0xfb; } if(ucLED12 == 1) { ucLedStatus16_09 = ucLedStatus16_09 | 0x08; } else { ucLedStatus16_09 = ucLedStatus16_09 & 0xf7; } if(ucLED13 == 1) { ucLedStatus16_09 = ucLedStatus16_09 | 0x10; } else { ucLedStatus16_09 = ucLedStatus16_09 & 0xef; } if(ucLED14 == 1) { ucLedStatus16_09 = ucLedStatus16_09 | 0x20; } else { ucLedStatus16_09 = ucLedStatus16_09 & 0xdf; } if(ucLED15 == 1) { ucLedStatus16_09 = ucLedStatus16_09 | 0x40; } else { ucLedStatus16_09 = ucLedStatus16_09 & 0xbf; } if(ucLED16 == 1) { ucLedStatus16_09 = ucLedStatus16_09 | 0x80; } else { ucLedStatus16_09 = ucLedStatus16_09 & 0x7f; } HC595_Drive(ucLedStatus16_09, ucLedStatus08_01); } } ///** //* @brief LED服務(wù)函數(shù) //* @param 無 //* @retval 無 //**/ //void LED_Flicker_01_08(void)


上一篇:51單片機(jī)實(shí)現(xiàn)用LED燈和按鍵來模擬工業(yè)自動化設(shè)備的運(yùn)動控制
下一篇:51單片機(jī)實(shí)現(xiàn)兩片聯(lián)級74HC595多任務(wù)并行處理兩路跑馬燈
推薦閱讀
史海拾趣
在發(fā)展過程中,Bel Fuse注重與合作伙伴建立長期穩(wěn)定的合作關(guān)系。公司積極尋求與全球知名企業(yè)的合作機(jī)會,通過技術(shù)合作、資源共享等方式,共同推動電子行業(yè)的發(fā)展。這些合作伙伴關(guān)系的建立不僅為公司帶來了更多的業(yè)務(wù)機(jī)會,還提升了公司的技術(shù)水平和市場競爭力。
隨著ETIC的產(chǎn)品在市場上逐漸獲得認(rèn)可,公司面臨著市場拓展的挑戰(zhàn)。為了擴(kuò)大市場份額,ETIC決定進(jìn)入國際市場。他們首先選擇了亞洲市場作為突破口,通過深入了解當(dāng)?shù)厥袌鲂枨蠛透偁幁h(huán)境,制定了一系列有針對性的營銷策略。經(jīng)過幾年的努力,ETIC成功地在亞洲市場建立了穩(wěn)定的客戶基礎(chǔ),并逐漸將業(yè)務(wù)拓展到了歐洲和北美市場。
隨著環(huán)保意識的不斷提高,綠色制造成為電子行業(yè)的重要發(fā)展趨勢。川晶科技積極響應(yīng)國家綠色發(fā)展的號召,通過引進(jìn)先進(jìn)的環(huán)保設(shè)備和技術(shù),實(shí)現(xiàn)了生產(chǎn)過程的綠色化、低碳化。公司不斷優(yōu)化生產(chǎn)工藝,減少能源消耗和廢棄物排放,推動產(chǎn)品向綠色、環(huán)保方向發(fā)展。川晶科技的綠色制造實(shí)踐得到了業(yè)界的廣泛贊譽(yù),成為行業(yè)內(nèi)的綠色標(biāo)桿。
隨著技術(shù)的不斷進(jìn)步和市場的不斷擴(kuò)大,F(xiàn)airchild Semiconductor開始將目光投向全球市場。公司積極開拓海外市場,與全球各地的企業(yè)建立合作關(guān)系,共同推動半導(dǎo)體技術(shù)的發(fā)展。通過不斷努力,F(xiàn)airchild逐漸在全球半導(dǎo)體市場中占據(jù)了重要地位。
2016年,F(xiàn)airchild Semiconductor被ON Semiconductor收購。這一收購標(biāo)志著Fairchild Semiconductor的發(fā)展進(jìn)入了一個新的階段。ON Semiconductor是一家全球領(lǐng)先的半導(dǎo)體公司,擁有廣泛的產(chǎn)品線和強(qiáng)大的技術(shù)實(shí)力。通過整合Fairchild Semiconductor的技術(shù)和資源,ON Semiconductor進(jìn)一步鞏固了其在半導(dǎo)體行業(yè)中的領(lǐng)導(dǎo)地位,并繼續(xù)為全球客戶提供優(yōu)質(zhì)的半導(dǎo)體產(chǎn)品和服務(wù)。
|
星巴克的賺錢利器——Embedded for Point of Service 對于愛喝咖啡的人來說,星巴克(Starbucks)是一個耳熟能詳?shù)拿帧P前涂耸鞘袌鼋?jīng)濟(jì)的寵兒之一。公司在在世界28個國家共建有5689家連鎖店。自從10年前掛牌上市之后,銷售額以每年平均20%的速度遞增,利潤額每年的平均增長幅度為30%。 那么,星 ...… 查看全部問答∨ |
我用單片機(jī)同步串口(8位)接收和發(fā)送數(shù)據(jù),通過ATT7022采集電壓值,然后通過SPI總線傳給單片機(jī),但是ATT7022的數(shù)據(jù)寄存器都是24位的,不知道在硬件方面單片機(jī)和ATT7022之間是不是還應(yīng)該有什么接口電路?或者在軟件設(shè)計(jì)方面應(yīng)該怎么樣做才能接收24 ...… 查看全部問答∨ |
|
本帖最后由 paulhyde 于 2014-9-15 03:35 編輯 開關(guān)電源07大賽剛剛做過,估計(jì)今年出題的概率很小了,不過相關(guān)的模塊還是可能用得到的,有興趣做電源類的可以看看~~~ [ 本帖最后由 open82977352 于 2009-8-4 09:53 編輯 ] … 查看全部問答∨ |
也是看到網(wǎng)上有個朋友的猜想,于是轉(zhuǎn)載過來,也請大家談?wù)勎迥旰笫謾C(jī)的樣子? 現(xiàn)在的手機(jī)功能已是五花八門,可能手機(jī)行業(yè)內(nèi)的人也不一定了解手機(jī)的全部功能。五年后或八年后的手機(jī)會是什么樣的呢??? 就是一小電腦?答案:是,也不全是。準(zhǔn)確的 ...… 查看全部問答∨ |
|
請不要告訴我在OS下讀的方法。我要DOS的。要匯編的。 我看了AHCI的spec,只看到了發(fā)命令和讀狀態(tài)的register,可是不知道哪個register是讀取那256個word的。請教大蝦們。先謝了… 查看全部問答∨ |
|
|
要開題了,今天老板給了個題目,基于WindowsCE手持式IPTV測試儀88e1111PHY芯片驅(qū)動程序的設(shè)計(jì)與實(shí)現(xiàn): 平時我們做驅(qū)動一般都是和ARM直連的或者是arm的外擴(kuò),但是在這個項(xiàng)目里面,這塊PHY芯片和FPGA相連,然后FPGA和ARM通過爽口RAM相連,請問ARM應(yīng) ...… 查看全部問答∨ |
我現(xiàn)在有幾個問題不清楚,想請各位解決下: 1、在LCD的驅(qū)動當(dāng)中有這么一個參數(shù)LCD_ARRAY_SIZE_TFT_16BIT,在我的頭文件中是這么定義的 #define LCD_ARRAY_SIZE_TFT_16BIT (LCD_SCR_XSIZ ...… 查看全部問答∨ |
|
error C2061: syntax error : identifier 'IAuthenticate' EVC下想通過OLE DB訪問數(shù)據(jù)庫,可編譯時報(bào)錯:error C2061: syntax error : identifier \'IAuthenticate\' 請問是什么原因?… 查看全部問答∨ |

設(shè)計(jì)資源 培訓(xùn) 開發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實(shí)現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進(jìn)行通信丟包和多包案例分享
- 【下載】LAT1511 運(yùn)行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩(wěn)定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析

- 英飛凌微控制器:以全新實(shí)惠套件和強(qiáng)大開發(fā)環(huán)境為開發(fā)者提供支持
- iTOP-i.MX6開發(fā)板設(shè)備數(shù)驅(qū)動Menuconfig的用法
- 迅為IMX6ULL開發(fā)板Qt for Android搭建開發(fā)環(huán)境
- 迅為i.MX8M mini開發(fā)板Windots QT系統(tǒng)開發(fā)環(huán)境搭建
- 迅為IMX8MM開發(fā)板Yocto系統(tǒng)使用Gstarwmra(一)
- 迅為IMX8M mini開發(fā)板Linix系統(tǒng)修改默認(rèn)屏幕
- iTOP-4412開發(fā)板支持4G以上文件系統(tǒng)擴(kuò)展
- 迅為IMX8MM開發(fā)板Yocto系統(tǒng)設(shè)置開機(jī)自啟動
- 迅為IMX6Q開發(fā)板 Buildroot文件系統(tǒng)mqtt測試







 ET08SD1V31QE2
ET08SD1V31QE2- 高通攜手中國“汽車朋友圈”亮相2025上海車展: 加速駕駛輔助普惠,推動艙駕創(chuàng)新升級
- 工業(yè)市場正在快速回暖,德州儀器如何重塑電力電子市場?
- 特斯拉:美國交付的Model Y/3電池包已實(shí)現(xiàn)100%美國生產(chǎn)
- 地平線與博世深化合作,攜手為多家車企提供輔助駕駛產(chǎn)品
- 強(qiáng)化中國市場戰(zhàn)略布局,德州儀器正靈活應(yīng)對全球關(guān)稅挑戰(zhàn)
- Molex莫仕通過本地合作和創(chuàng)新加強(qiáng)支持中國汽車行業(yè)
- 貿(mào)澤開售Texas Instruments適用于高分辨率AR HUD的 全新DLP4620S-Q1 0.46"汽車數(shù)字微鏡器件
- ROHM推出高功率密度的新型SiC模塊,將實(shí)現(xiàn)車載充電器小型化!
- 用上車規(guī)級UFS 4.0,讓出行變得高效且可靠
- 車載測試技術(shù)解析:聚焦高帶寬、多通道同步采集與協(xié)議分析
- 直播已結(jié)束【解鎖 TI Sitara AM2x MCU 在電機(jī)驅(qū)動中的新可能】
- 恩智浦跨界處理器能玩出多少應(yīng)用
- Intel白皮書下載有獎
- ST電機(jī)評測有獎大作戰(zhàn):領(lǐng)取任務(wù)卡,一起啃電機(jī)驅(qū)動難題!
- 瑞薩電子最新觸控微控制器R7F0C208入門套件免費(fèi)申請,參與申請還能贏好禮!
- 2024安路科技FPGA技術(shù)研討會-廣州站 火熱報(bào)名中
- 有獎直播:是德科技高速芯片設(shè)計(jì)新技術(shù)研討會
- 2024 DigiKey 應(yīng)用說:樹莓派 5 在視頻直播中的應(yīng)用
- 看MCU精品課程,讓你立馬變身考試達(dá)人!
- Quartus Prime設(shè)計(jì)軟件15.1版 帶你體驗(yàn)革命性的設(shè)計(jì)生涯
- 英特爾裁撤數(shù)十自動駕駛部門員工:為減少業(yè)務(wù)重疊
- 特斯拉的新芯片,可能會讓自動駕駛更近一步
- 李開復(fù):AI治理,可“以子之矛攻己之盾”
- LCD屏下指紋識別實(shí)現(xiàn)進(jìn)一步突破,中端手機(jī)迎來新成長機(jī)遇
- 一輛汽車居然含有$1500當(dāng)量的半導(dǎo)體,來看看都是啥
- 澎湃微開拓AIoT芯片新賽道—具AI能力的MCU
- 800V高壓平臺+SiC將成為主流方向?
- realme 成三季度增長最快的 5G 智能手機(jī)品牌
- 種下硅林的泰克,更期待創(chuàng)造未來
- 迎接異構(gòu)計(jì)算,CRN評選2021年全球最熱門的半導(dǎo)體初創(chuàng)公司







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號