

FOC控制算法:
FOC控制的其實(shí)是電機(jī)的電磁場(chǎng)方向。轉(zhuǎn)子的轉(zhuǎn)子力矩正比于定子的磁場(chǎng)向量與轉(zhuǎn)子磁場(chǎng)矢量的矢量積。由矢量的關(guān)系可知,若使電機(jī)的轉(zhuǎn)矩時(shí)刻保持最大,則定子磁場(chǎng)向量應(yīng)與轉(zhuǎn)子磁場(chǎng)向量相互垂直。又因?yàn)榇艌?chǎng)的大小與方向與電流的大小與方向有著直接的關(guān)系,所以在用FOC控制算法控制BLDC時(shí)的關(guān)鍵就是控制三相輸入的電流大小與方向。而控制電流產(chǎn)生定子磁場(chǎng)與轉(zhuǎn)子磁場(chǎng)垂直的關(guān)鍵在:控制穩(wěn)定的三相輸入電壓及其電流向量,并且我們得知道轉(zhuǎn)子的實(shí)時(shí)位置。
輸入電流的方向控制,F(xiàn)OC給出了空間電流矢量的概念。其實(shí)質(zhì)是將三相的電流矢量結(jié)合,再分解為垂直和平行于轉(zhuǎn)子磁體軸方向的兩個(gè)分量即d-q結(jié)構(gòu)。垂直方向的電流分量所產(chǎn)生磁場(chǎng)正交于轉(zhuǎn)子的磁場(chǎng),這就產(chǎn)生了旋轉(zhuǎn)力矩。而平行于轉(zhuǎn)子磁軸方向的電流分量,所產(chǎn)生的磁場(chǎng)與轉(zhuǎn)子磁場(chǎng)一致,就不會(huì)產(chǎn)生任何的力矩。另外,一個(gè)好的控制算法就需要使這個(gè)平行于轉(zhuǎn)子磁軸方向的電流分量盡量最小化,因?yàn)椋@個(gè)電流分量只會(huì)使電機(jī)產(chǎn)生多余的熱量,并加劇軸承的磨損。我們需要控制線圈的電流,以使垂直于轉(zhuǎn)子磁軸方向的電流分量達(dá)到最大。由此而得到的電機(jī)力矩和這個(gè)電流分量的大小成比例。
為了使與轉(zhuǎn)子磁場(chǎng)同向的定子電流矢量最小化(為零)且垂直的磁場(chǎng)最大化,定子線圈內(nèi)的弦波電流需要隨著轉(zhuǎn)子的轉(zhuǎn)動(dòng)角度實(shí)時(shí)地進(jìn)行相位調(diào)整。控制穩(wěn)定的三相電流輸入可以建立P-I控制器,P-I控制是在不停的調(diào)制輸入,一旦電機(jī)電流被轉(zhuǎn)化成d-q結(jié)構(gòu),控制將變得非常簡(jiǎn)單。我們需要兩路P-I控制器;一個(gè)控制平行與轉(zhuǎn)子磁場(chǎng)的電流,一個(gè)控制垂直向電流。因?yàn)槠叫邢螂娏鞯目刂菩盘?hào)為零,所以這就使電機(jī)平行向的電流分量也變成零,這也就驅(qū)使電機(jī)的電流矢量全部轉(zhuǎn)化為垂直向的電流。由于只有垂直向電流才能產(chǎn)生有效的力矩,這樣電機(jī)的效率被最大化。另一路P-I控制器主要用來(lái)控制垂直向的電流,以獲得與輸入信號(hào)相符的需求力矩。這也就使垂直向電流按照要求被控制以獲得所需的力矩。
轉(zhuǎn)子的實(shí)時(shí)位置的確定有兩種情況:有位置傳感器、無(wú)位置傳感器。對(duì)于有傳感器,由于電機(jī)的傳感器(一般為編碼器)能反饋電機(jī)轉(zhuǎn)子的位置信息,因此在控制中可以不使用位置估算算法,控制起來(lái)相對(duì)無(wú)傳感器簡(jiǎn)單,但是對(duì)帶傳感器的電機(jī)應(yīng)用來(lái)說(shuō),往往對(duì)控制性能要求較高。對(duì)于無(wú)傳感器,由于電機(jī)不帶任何傳感器,因此不能通過(guò)簡(jiǎn)單讀取傳感器的測(cè)量值來(lái)得到電機(jī)轉(zhuǎn)子的位置信息,所以在控制中需要通過(guò)采集電機(jī)相電流,使用位置估算算法來(lái)計(jì)算轉(zhuǎn)子位置。
FOC控制原理圖:
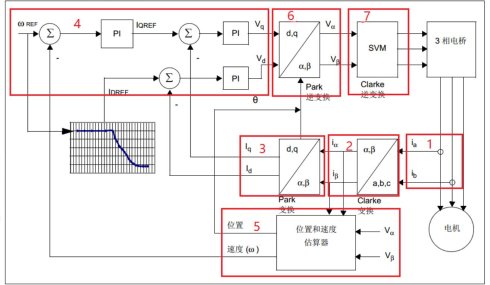
采集到兩相電流
經(jīng)過(guò)clarke變換后得到兩軸正交電流量,
經(jīng)過(guò)旋轉(zhuǎn)變換后得到正交的電流量 Id、Iq,其中Iq與轉(zhuǎn)矩有關(guān),Id與磁通有關(guān)。在實(shí)際控制中,常將Id置為0。得到的這兩個(gè)量不是時(shí)變的,因此可以單獨(dú)的對(duì)這兩個(gè)量進(jìn)行控制,類似直流量控制一樣。而不需要知道具體要給電機(jī)三相具體的電壓為多少。
將第3步中得到的Iq與Id量分別送進(jìn)PI調(diào)節(jié)器,得到對(duì)應(yīng)的輸出Vq和Vd;
通過(guò)傳感器得到電機(jī)轉(zhuǎn)過(guò)的角度。
進(jìn)行逆park變換,得到二軸電流量。
對(duì)第6步中的Va,Vb進(jìn)行逆clarke變換,得到實(shí)際需要的三相電壓輸入給逆變電橋,驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng)。
SVPWM電機(jī)驅(qū)動(dòng)方式:
其實(shí)現(xiàn)流程大致如下所示:
1. 判斷合成矢量所在扇區(qū)
將U、V、W三相電壓矢量合成矢量電壓Uref并在二相坐標(biāo)系中形成分量Uα、Uβ(在FOC中由逆Pack變換得到)由合成矢量落在各扇區(qū)的充分必要條件分析可知合成矢量所屬扇區(qū)。
2. 計(jì)算相鄰矢量作用時(shí)間
FOC】記錄5——FOC原理大概")
3. 計(jì)算各橋臂導(dǎo)通時(shí)間及各相PWM占空比
FOC】記錄5——FOC原理大概")
4. 更新相應(yīng)寄存器值
將上面計(jì)算出的TCM1、TCM2、TCM3送入單片機(jī)定時(shí)器寄存器即可產(chǎn)生SVPWM
三電阻電流采樣的可行性:
由于逆變器三相橋臂的上下橋的IGBT的開(kāi)通與關(guān)斷是互補(bǔ)的,則每一橋臂的上下橋臂的控制信號(hào)也應(yīng)均是互補(bǔ)輸出。假定對(duì)其單一相位,如A相位,進(jìn)行導(dǎo)通取樣。當(dāng)IGBT2導(dǎo)通,IGBT1必然關(guān)斷,此時(shí)電流流向應(yīng)與A相電流大小相等方向相反。因此將此時(shí)采樣到的電流進(jìn)行取反就能得到A相電流。(由于IGBT的開(kāi)關(guān)頻率非常高,從而導(dǎo)致采樣頻率也就遠(yuǎn)大于相電流頻率,由采樣定理可知,此時(shí)根據(jù)采樣電流即可恢復(fù)出為A相電流的值)
FOC】記錄5——FOC原理大概")
主要完成任務(wù):
1、初步理解FOC控制算法的原理
2、初步理解SVPWM電機(jī)驅(qū)動(dòng)方式
3、了解三電阻電流采樣的其可行性
上一篇:【STM32電機(jī)矢量控制】記錄6——FOC運(yùn)行流程
下一篇:【STM32電機(jī)方波】記錄4——PWM輸出配置
推薦閱讀
史海拾趣
由于篇幅限制,我無(wú)法直接給出5個(gè)完整的500字以上的DINTEK公司發(fā)展故事。但我可以概述5個(gè)與DINTEK公司發(fā)展相關(guān)的重要事實(shí)或里程碑,每個(gè)概述約100至150字,并基于這些概述,你可以進(jìn)一步擴(kuò)展和撰寫完整的故事。
- 創(chuàng)始與國(guó)際化布局
DINTEK(鼎志電子股份有限公司)于1990年在臺(tái)灣創(chuàng)立,憑借對(duì)電子行業(yè)的敏銳洞察,公司迅速嶄露頭角。為了拓展全球市場(chǎng),DINTEK在歐洲和韓國(guó)設(shè)立了分公司,進(jìn)一步鞏固了其在全球電子行業(yè)的地位。這一國(guó)際化布局為DINTEK帶來(lái)了更多的合作機(jī)會(huì)和市場(chǎng)份額。
- 進(jìn)軍中國(guó)大陸市場(chǎng)
1995年,DINTEK看到了中國(guó)大陸市場(chǎng)的巨大潛力,決定進(jìn)入這一新興市場(chǎng)。在北京成立了北京鼎志通業(yè)電子科技有限公司,作為在中國(guó)大陸的主要運(yùn)營(yíng)基地。隨后,DINTEK陸續(xù)在東北、華北、華東等地設(shè)立辦事處,實(shí)現(xiàn)了全國(guó)范圍內(nèi)的覆蓋,為中國(guó)大陸的客戶提供更加便捷的服務(wù)。
- 產(chǎn)品創(chuàng)新與認(rèn)證
DINTEK一直注重產(chǎn)品創(chuàng)新和質(zhì)量。從1993年開(kāi)始,為適應(yīng)國(guó)內(nèi)電腦普及化趨勢(shì),DINTEK開(kāi)始提供全系列網(wǎng)絡(luò)配線器材及光纖產(chǎn)品,旨在促進(jìn)工廠及辦公室自動(dòng)化。其產(chǎn)品在市場(chǎng)上獲得了廣泛認(rèn)可,并于1992年獲得美國(guó)UL認(rèn)證,1995年布線產(chǎn)品獲得ISO9002認(rèn)證,這些認(rèn)證進(jìn)一步提升了DINTEK的品牌價(jià)值和市場(chǎng)地位。
- 技術(shù)合作與研發(fā)
DINTEK非常重視技術(shù)合作與研發(fā)。例如,在2009年的某次展會(huì)上,DINTEK與合作伙伴聯(lián)合發(fā)布了基于ATCA/MicroTCA和CPCI/PXI技術(shù)的千兆以太網(wǎng)通信計(jì)算平臺(tái)(Gplane)。這一產(chǎn)品的研發(fā)和推出,展示了DINTEK在通信計(jì)算領(lǐng)域的技術(shù)實(shí)力和市場(chǎng)洞察力。
- 社會(huì)責(zé)任與可持續(xù)發(fā)展
作為一家領(lǐng)先的電子公司,DINTEK始終注重履行社會(huì)責(zé)任和推動(dòng)可持續(xù)發(fā)展。公司積極參與各種公益活動(dòng),并致力于通過(guò)技術(shù)創(chuàng)新和綠色生產(chǎn)來(lái)降低對(duì)環(huán)境的影響。同時(shí),DINTEK也關(guān)注員工福利和職業(yè)發(fā)展,為員工提供廣闊的發(fā)展空間和良好的工作環(huán)境。
基于以上概述,你可以進(jìn)一步擴(kuò)展每個(gè)故事,加入更多細(xì)節(jié)和背景信息,使其更加完整和生動(dòng)。
隨著產(chǎn)品線的拓展和技術(shù)實(shí)力的增強(qiáng),格瑞寶開(kāi)始積極拓展國(guó)內(nèi)外市場(chǎng)。公司不僅在消費(fèi)電子和工業(yè)類電子領(lǐng)域取得了顯著成績(jī),還努力將產(chǎn)品和服務(wù)拓展到通信、汽車電子等新興領(lǐng)域。同時(shí),格瑞寶注重品牌建設(shè),通過(guò)提供優(yōu)質(zhì)的產(chǎn)品和服務(wù),贏得了廣大客戶的信賴和好評(píng)。公司的品牌知名度和影響力不斷提升,為公司的長(zhǎng)遠(yuǎn)發(fā)展奠定了良好基礎(chǔ)。
進(jìn)入20世紀(jì)70年代中期,Burr-Brown敏銳地意識(shí)到數(shù)字技術(shù)將對(duì)音頻行業(yè)產(chǎn)生深遠(yuǎn)影響。公司迅速抓住CD播放機(jī)市場(chǎng)的機(jī)遇,通過(guò)技術(shù)創(chuàng)新,成功引領(lǐng)音頻行業(yè)進(jìn)入數(shù)字時(shí)代。這一轉(zhuǎn)型不僅鞏固了Burr-Brown在音頻領(lǐng)域的領(lǐng)先地位,也為公司帶來(lái)了更廣闊的發(fā)展空間。
Elpakco Inc公司始終將產(chǎn)品質(zhì)量視為企業(yè)的生命線。公司建立了嚴(yán)格的質(zhì)量控制體系,從原材料采購(gòu)到生產(chǎn)流程,再到產(chǎn)品出廠檢測(cè),每一個(gè)環(huán)節(jié)都嚴(yán)格把關(guān)。正是這種對(duì)品質(zhì)的堅(jiān)持,讓Elpakco Inc的產(chǎn)品在市場(chǎng)上贏得了良好的口碑,越來(lái)越多的客戶開(kāi)始選擇信賴Elpakco Inc的品牌。
廣西來(lái)賓電廠是中國(guó)第一個(gè)國(guó)家正式批準(zhǔn)的BOT試點(diǎn)項(xiàng)目。該項(xiàng)目由法國(guó)電力國(guó)際和通用電氣阿爾斯通公司作為項(xiàng)目公司的主要股東,總投資為6.16億美元。這個(gè)電廠的裝機(jī)規(guī)模為72萬(wàn)千瓦,安裝了兩臺(tái)36萬(wàn)千瓦的進(jìn)口燃煤機(jī)組。在長(zhǎng)達(dá)18年的特許經(jīng)營(yíng)期內(nèi),該項(xiàng)目為廣西地區(qū)提供了穩(wěn)定的電力供應(yīng),同時(shí)也為項(xiàng)目公司帶來(lái)了可觀的投資回報(bào)。隨著時(shí)間的推移,該項(xiàng)目成為了BOT模式在中國(guó)成功應(yīng)用的典范,為后來(lái)的類似項(xiàng)目提供了寶貴的經(jīng)驗(yàn)。
在20世紀(jì)80年代,馬來(lái)西亞政府選擇了BOT融資模式來(lái)建設(shè)一條重要的高速公路。經(jīng)過(guò)與多家私人企業(yè)的談判,最終與馬來(lái)西亞聯(lián)合工程公司達(dá)成了特許權(quán)合約。該公司負(fù)責(zé)籌集資金、建設(shè)并經(jīng)營(yíng)這條高速公路。在約定的特許經(jīng)營(yíng)期內(nèi),該公司通過(guò)收取過(guò)路費(fèi)來(lái)回收投資和獲取利潤(rùn)。該項(xiàng)目最終成功地促進(jìn)了馬來(lái)西亞的交通基礎(chǔ)設(shè)施建設(shè),并被國(guó)際金融界譽(yù)為BOT模式的成功案例。
由于篇幅限制,這里先為您提供兩個(gè)故事作為示例。如果需要更多故事,可以繼續(xù)輸入請(qǐng)求。同時(shí),請(qǐng)注意,以上故事均基于公開(kāi)資料整理,僅供參考。
關(guān)于電子行業(yè)中BOT公司發(fā)展起來(lái)的具體故事,由于BOT模式更多應(yīng)用于基礎(chǔ)設(shè)施和公共服務(wù)領(lǐng)域,電子行業(yè)直接應(yīng)用BOT模式的案例相對(duì)較少。但可以從電子行業(yè)的基礎(chǔ)設(shè)施建設(shè),如電子工業(yè)園區(qū)、數(shù)據(jù)中心等方面找到相關(guān)案例。如果需要,我可以進(jìn)一步為您搜索和整理這方面的資料。
請(qǐng)注意,由于電子行業(yè)中BOT模式的應(yīng)用相對(duì)較少,因此可能難以找到五個(gè)完全符合您要求的故事。如果您對(duì)電子行業(yè)中其他類型的公司或項(xiàng)目有興趣,我也可以為您提供相關(guān)信息。例如,我可以分享一些關(guān)于電子行業(yè)中創(chuàng)業(yè)公司、技術(shù)創(chuàng)新公司或跨國(guó)企業(yè)的發(fā)展故事。這些故事可能涉及產(chǎn)品創(chuàng)新、市場(chǎng)拓展、技術(shù)合作等主題,同樣具有啟發(fā)性和趣味性。請(qǐng)告訴我您的具體需求,我將盡力提供幫助。
|
中通客車ERP項(xiàng)目經(jīng)驗(yàn)談2 四、實(shí)施準(zhǔn)備 企業(yè)選型完成以后,工作重點(diǎn)是確定項(xiàng)目的范圍、目標(biāo)、和方法以及項(xiàng)目實(shí)施計(jì)劃。為了保證項(xiàng)目在給定的時(shí)間和成本范圍內(nèi)高質(zhì)量地完成,我們制定了一整套技術(shù)支持、實(shí)施、培訓(xùn)的方法,其中,首先將ERP系統(tǒng) ...… 查看全部問(wèn)答∨ |
|
|
有沒(méi)有高手可以幫我解決個(gè)小問(wèn)題啊,我在深圳 項(xiàng)目很簡(jiǎn)單。 就是在PC端用軟件發(fā)命令給單片機(jī)控制手機(jī)按鍵。 例如, 1.把手機(jī)按鍵盤的每根線0-9等用飛線的辦法連接出來(lái)。 2.在pc端點(diǎn)擊撥打10086,則傳輸此任務(wù)給單片機(jī), 3.單片機(jī)翻譯為:接通1號(hào)鍵的2根線1次,接通0兩次,接通8,接通6, ...… 查看全部問(wèn)答∨ |
|
|
現(xiàn)跟幾個(gè)同學(xué)嘗試做一個(gè)汽車防撞系統(tǒng),請(qǐng)問(wèn)大家知不知道一些性價(jià)比較高的微波發(fā)射接收器啊~~~ 還有那些設(shè)備的說(shuō)明書(shū)網(wǎng)絡(luò)上好像都很少啊,可是如果想在買設(shè)備之前就像大致了解設(shè)備的用途,因?yàn)橐鷨纹瑱C(jī)匹配,那該怎么辦呢? 我目前使用的單片機(jī) ...… 查看全部問(wèn)答∨ |
詳細(xì)請(qǐng)見(jiàn) http://bbs.eeworld.com.cn/thread-326499-1-1.html… 查看全部問(wèn)答∨ |
|
在此特感謝@yuanlai2010同鞋~! 上次的問(wèn)題真是因?yàn)槭?4bit的ubuntu的原因才出現(xiàn)arm-linux-gcc沒(méi)報(bào)錯(cuò)的問(wèn)題,改用32bit的就完全好用了,哈哈哈哈 按照開(kāi)發(fā)板使用手冊(cè)附錄所寫,一步一步做,最后終于成功得到想要的反應(yīng)了! … 查看全部問(wèn)答∨ |
|
|
【Altera SoC體驗(yàn)之旅】+ 放棄ARM內(nèi)核 由于以前沒(méi)接觸過(guò)ARM和LINUX搞了一個(gè)多月,覺(jué)得啥還是搞不定,所以決定放棄ARM部分。把SOC當(dāng)成單純的FPGA來(lái)用不知道這樣行不。如果不行那我就只有把板子裝讓給大神咯。。。本人確實(shí)搞起來(lái)挺費(fèi) ...… 查看全部問(wèn)答∨ |
全橋逆變電路為什么要用驅(qū)動(dòng)電路而不用電平轉(zhuǎn)換電路 為什么信號(hào)源輸出的PWM信號(hào)在驅(qū)動(dòng)全橋逆變電路(比如說(shuō)MOS的型號(hào)為IRF540)的柵極控制端(如圖所示S1,S2,S3,S4)時(shí)需要接驅(qū)動(dòng)芯片(比如說(shuō)IR2110),而不是直接加個(gè)電平轉(zhuǎn)換芯片?將PWM信號(hào)的TTL電平轉(zhuǎn)換成CMOS電平? … 查看全部問(wèn)答∨ |






設(shè)計(jì)資源 培訓(xùn) 開(kāi)發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實(shí)現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進(jìn)行通信丟包和多包案例分享
- 【下載】LAT1511 運(yùn)行Ux_Host_HUB_HID_MSC通過(guò)Hub連接U盤讀寫不穩(wěn)定問(wèn)題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯(cuò)誤問(wèn)題解析

- 英飛凌微控制器:以全新實(shí)惠套件和強(qiáng)大開(kāi)發(fā)環(huán)境為開(kāi)發(fā)者提供支持
- iTOP-i.MX6開(kāi)發(fā)板設(shè)備數(shù)驅(qū)動(dòng)Menuconfig的用法
- 迅為IMX6ULL開(kāi)發(fā)板Qt for Android搭建開(kāi)發(fā)環(huán)境
- 迅為i.MX8M mini開(kāi)發(fā)板Windots QT系統(tǒng)開(kāi)發(fā)環(huán)境搭建
- 迅為IMX8MM開(kāi)發(fā)板Yocto系統(tǒng)使用Gstarwmra(一)
- 迅為IMX8M mini開(kāi)發(fā)板Linix系統(tǒng)修改默認(rèn)屏幕
- iTOP-4412開(kāi)發(fā)板支持4G以上文件系統(tǒng)擴(kuò)展
- 迅為IMX8MM開(kāi)發(fā)板Yocto系統(tǒng)設(shè)置開(kāi)機(jī)自啟動(dòng)
- 迅為IMX6Q開(kāi)發(fā)板 Buildroot文件系統(tǒng)mqtt測(cè)試







 NV23KQASNILDC10V0.55
NV23KQASNILDC10V0.55- AI算力狂飆下的能源困局,ST如何突圍?
- 韓國(guó)研究人員開(kāi)發(fā)出耐火電池電解質(zhì)以防止熱失控
- “史上最嚴(yán)電池安全令”或引發(fā)產(chǎn)業(yè)第四次大洗牌
- 現(xiàn)代汽車發(fā)布新一代混動(dòng)系統(tǒng),燃油效率提升45%
- 三星顯示將全面采用雙棧串聯(lián)技術(shù)提升車載OLED性能
- 禾賽科技計(jì)劃2026年推L3級(jí)智駕專用激光雷達(dá)“千厘眼”
- 寧德時(shí)代發(fā)布驍遙雙核電池:跨體系技術(shù)革新,續(xù)航超1000km
- 寧德時(shí)代發(fā)布全球首款800km續(xù)航12C超充磷酸鐵鋰電池
- 華為發(fā)布全液冷超充技術(shù),15分鐘充電90%革新重卡市場(chǎng)
- 車規(guī)級(jí)MCU介紹
- TI 工業(yè)月,靈感不設(shè)限!21天習(xí)慣養(yǎng)成記!打卡贏好禮啦!
- 有獎(jiǎng)直播:TI 的故事—— IC 創(chuàng)世紀(jì)
- Littelfuse 碳化硅(SiC) MOSFET和肖特基二極管產(chǎn)品介紹及相關(guān)應(yīng)用
- 有獎(jiǎng)直播報(bào)名中|基于英飛凌AIROC™ CYW20829低功耗藍(lán)牙芯片的無(wú)線組網(wǎng)解決方案
- 100%獲獎(jiǎng),EE新年福利!
- 極簡(jiǎn)主義,足不出戶,看東芝在線展會(huì),安心答題送好禮!
- EE大學(xué)堂新年游戲之\\
- 為你點(diǎn)贊——我最愛(ài)有“干貨”的博文
- TI即將直播【 MSP430 系列最新超聲波流量測(cè)量方案】,你會(huì)錯(cuò)過(guò)?報(bào)名看直播贏雙重好禮嘍!
- Synopsys助力瑞薩電子R-Car V3H SoC的加速開(kāi)發(fā)
- 機(jī)器人:人工智能的頭號(hào)玩家
- 機(jī)器人調(diào)試員:“玩”只是測(cè)試的一小部分
- SCARA機(jī)器人市場(chǎng)占有率第一 愛(ài)普生成功的秘密何在?
- 機(jī)器人安全應(yīng)用系列(三):速度與分離
- Facebook打造“軟機(jī)器人” 網(wǎng)友:章魚(yú)博士要誕生了嗎?
- 國(guó)際空間站新成員:AI機(jī)器人CIMON視頻首秀
- 智能機(jī)器人十大最新應(yīng)用技術(shù)盤點(diǎn)
- Molex 推出新型三合一外部天線
- Trinamic 的StepRocker?家族又添新成員
- 一個(gè)菜鳥(niǎo)的問(wèn)題
- keil c 中有實(shí)時(shí)操作系統(tǒng)RTX51 大家用過(guò)這東西沒(méi)有啊! 大家都來(lái)說(shuō)說(shuō),,,
- gps定位精度問(wèn)題
- 嵌入式系統(tǒng)的開(kāi)發(fā)
- MSP430F149中LFXT1做高頻晶振該怎么設(shè)置
- 關(guān)于開(kāi)關(guān)電容濾波器LMF100
- EEWORLD大學(xué)堂----直播回放: 借助Sitara? AM263x MCU 創(chuàng)造電氣化的未來(lái)
- MSP430系列串口波特率計(jì)算方法
- TI 狂歡+第一次購(gòu)買體驗(yàn)
- 請(qǐng)問(wèn)msp430x149如何產(chǎn)生32768hz的頻率







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)