


首先簡單介紹一下CAN總線,關于CAN總線是誰發明的,CAN總線的歷史,CAN總線的發展,CAN總線的應用場合,這些,通通不說。這里只是以我個人理解,簡單說說CAN通信。CAN總線的端點沒有地址(除非自己在幀里定義地址),CAN總線通信不用地址,用標識符,不是單獨的誰發給誰,而是,你總是發送給整個網絡。然后每個節點都有過濾器,對網絡上的傳播的幀的標識符進行過濾,自己想要什么樣的幀,可以設置自己的過濾器,接收相關的幀信息。如果兩個節點同時發送怎么辦?這個不用我們擔心,CAN控制器會自己仲裁,讓高優先級的幀先發。
然后我們可以了解一下stm32的CAN控制器。
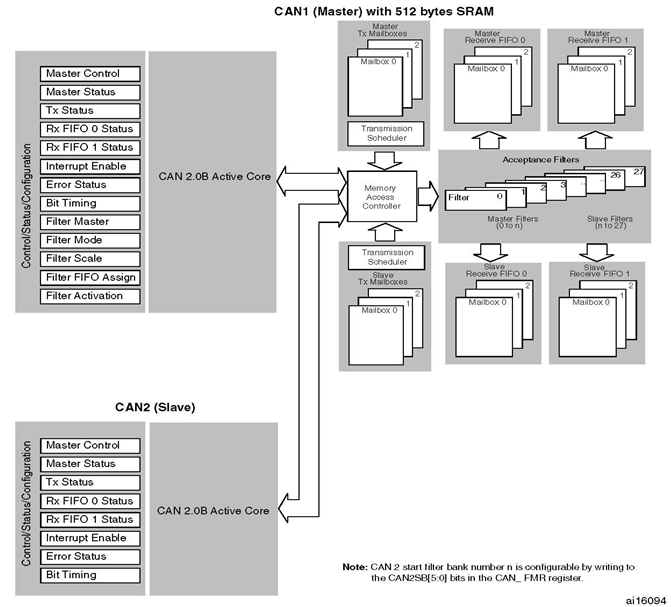
如上圖所示,stm32有兩個can控制器,can1(主),和can2(從),其中過濾器的設置是通過can1來設置,其他工作模式,波特率等,可以各自設置。每個控制器有三個發送郵箱,兩個fifo,每個fifo有三個接收郵箱。
發送:選擇一個空的發送郵箱,把幀信息寫到該發送郵箱的寄存器里,請求發送,控制器就會根據標識符的優先級把幀先后發送出去。
接收:如果接收到的幀的標識符能過過濾表的一系列過濾,該幀信息就會保存在fifo接收郵箱的寄存器里。
fifo1,每組都包括兩個32位存儲器,可以配置成一個32位有位屏蔽功能的標識符過濾器,或者兩個32位完全匹配的標識符過濾器,或者兩個16位有位屏蔽功能的標識符過濾器,或者四個16位完全匹配的標識符過濾器。如下圖所示:
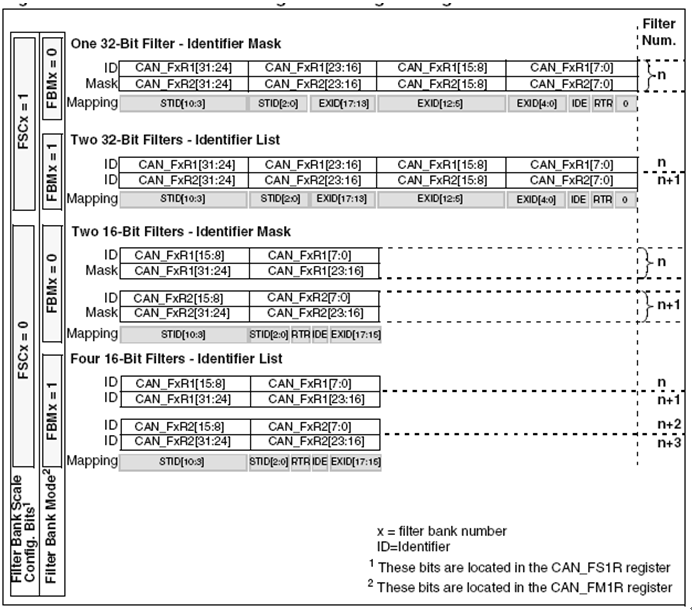
我所說的完全匹配的意思是,接收到的幀的標識符每一位都要跟過濾器對應的位一樣,才能過得了這個過濾器。有位屏蔽功能的意思是一個寄存器放標識符,一個放屏蔽掩碼,屏蔽掩碼為1的位對應的接收到的幀的標識符的位與對應的放標識符的寄存器的位一致,就能通過。
傳輸一位的時間和波特率的計算:
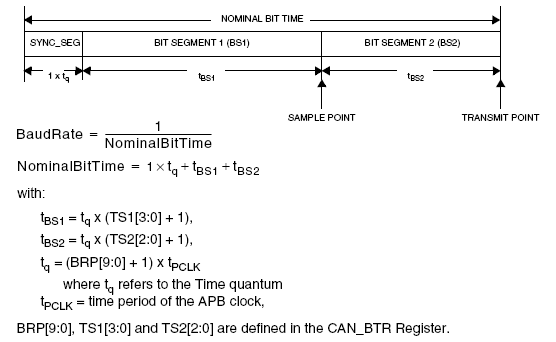
CAN控制器的波特率是由APB時鐘線和CAN位時序寄存器CAN_BTR的TS2[3:0]、TS1[2:0]和BRP[9:0]確定的,其中,TS1[2:0]定義了時間段1占用多少個時間單元,TS2[3:0]定義了時間段2占用多少個時間單元,BRP[9:0]定義對APB1時鐘的分頻。
PS:設置波特率為1M
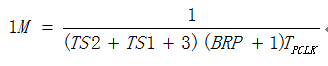
其中Tpclk為APB1的時鐘周期,假設為
Tpclk = 1/42M
0≦TS1≦7
0≦TS2≦15
0≦BRP≦1021
根據以上數據,有
(TS2+TS1+3)(BRP+1)=42
令BRP=2,有
TS2+TS1=11
令TS1=8,TS2=3
設置步驟:
1. 設置中斷優先級分組(如果之前沒有設置),這個最好一個程序里只在開頭設置一次。
2. 使能相關GPIO時鐘。
3. 選擇相關GPIO引腳的復用功能。
4. 設置相關GPIO引腳為復用模式。
5. 設置相關GPIO引腳的速度,方式。
6. 設置主控制寄存器MCR,進入初始化模式
7. 等待進入初始化模式
8. 設置波特率。
9. 其他設置。
10. 如果要用到中斷,在中斷使能寄存器IER中使能相關中斷響應。
11. 如果要用到中斷,設置相關中斷優先級(NVIC_IP)。
12. 如果要用到中斷,使能相關中斷(NVIC_ISER)。
13. 設置主控制寄存器MCR,進入正常工作模式。
14. 設置FMR,使過濾器組工作在初始化模式。
15. 設置FMR的CAN2SB,確定CAN2的過濾器組從哪一組開始。
16. 設置用到的過濾器組的工作方式。
17. 設置用到的過濾器組的位寬。
18. 給fifo0和fifo2劃分(關聯)過濾組。
19. 禁用用到的過濾器組。
20. 設置過濾器組的標識符,幀類型等。
21. 使能相關過濾器組。
22. 設置FMR,使過濾器組工作在正常模式。
23. 如果要用中斷,編寫中斷服務函數(函數名是固定的)。
24. 中斷服務函數里檢查是哪個中斷。
25. 編寫相應服務程序。
程序:
/************************************
標題:操作CAN的練習
軟件平臺:IAR for ARM6.21
硬件平臺:stm32f4-discovery
主頻:168M
描述:通過硬件收發器連接CAN1,CAN2
組成一個兩個端點的網絡
CAN1循環發出數據幀
CAN2接收過濾數據幀
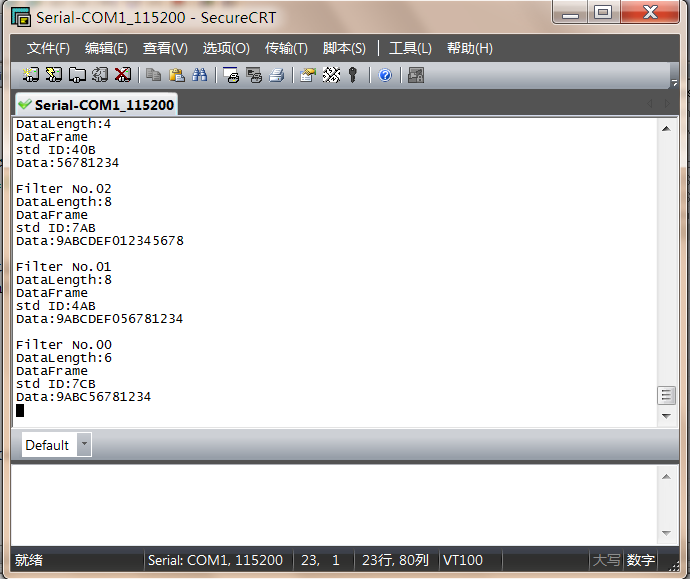
用uart把CAN2接收到
的數據幀發到超級終端
author:小船
data:2012-08-14
*************************************/
#include
#include "MyDebugger.h"
#define RECEIVE_BUFFER_SIZE 20
u32 CAN2_receive_buffer[RECEIVE_BUFFER_SIZE][4];
u8 UART_send_buffer[1800];
u8 Consumer = 0;
u8 Producer = 0;
u32 Gb_TimingDelay;
void Delay(uint32_t nTime);
void TIM7_init();//定時1s
u32 get_rece_data();
void CAN_GPIO_config();
void main ()
{
u32 empty_box;
SysTick_Config(SystemCoreClock / 1000); //設置systemtick一毫秒中斷
SCB->AIRCR = 0x05FA0000 | 0x400; //中斷優先級分組 搶占:響應=3:1
MyDebugger_Init();
TIM7_init();
MyDebugger_Message( "\n\rtesting......\n\r" ,
sizeof("\n\rtesting......\n\r")/sizeof(char) );
CAN_GPIO_config();
RCC->APB1ENR |= ((1<<25)|(1<<26));//使能CAN1、CAN2時鐘
CAN1->MCR = 0x00000000;
/*
請求進入初始化模式
禁止報文自動重傳
自動喚醒模式
*/
CAN1->MCR |= ((1<<0)|(1<<4)|(1<<5));
CAN1->MCR &= ~(1<<16);//在調試時,CAN照常工作
while(!(CAN1->MSR & 0xfffffffe)) //等待進入初始化模式
{
MyDebugger_LEDs(orange, on);
}
MyDebugger_LEDs(orange, off);
/*
正常模式
重新同步跳躍寬度(1+1)tq
TS2[2:0]=3
TS1[3:0]=8
BRP[9:0]=2
ps:
tq = (BRP[9:0] + 1) x tPCLK,
tBS2 = tq x (TS2[2:0] + 1),
tBS1 = tq x (TS1[3:0] + 1),
NominalBitTime = 1 × tq+tBS1+tBS2,
BaudRate = 1 / NominalBitTime
波特率設為1M
*/
CAN1->BTR = ((0<<30)|(0x01<<24)|(3<<20)|(8<<16)|(2<<0));
CAN1->MCR &= ~(0x00000001);//正常工作模式
CAN2->MCR = 0x00000000;
/*
請求進入初始化模式
禁止報文自動重傳
自動喚醒模式
*/
CAN2->MCR |= ((1<<0)|(1<<4)|(1<<5));
CAN2->MCR &= ~(1<<16);//在調試時,CAN照常工作
while(!(CAN2->MSR & 0xfffffffe)) //等待進入初始化模式
{
MyDebugger_LEDs(orange, on);
}
MyDebugger_LEDs(orange, off);
/*
正常模式
重新同步跳躍寬度(1+1)tq
TS2[2:0]=3
TS1[3:0]=8
BRP[9:0]=2
ps:
tq = (BRP[9:0] + 1) x tPCLK,
tBS2 = tq x (TS2[2:0] + 1),
tBS1 = tq x (TS1[3:0] + 1),
NominalBitTime = 1 × tq+tBS1+tBS2,
BaudRate = 1 / NominalBitTime
波特率設為1M
*/
CAN2->BTR = ((0<<30)|(0x01<<24)|(3<<20)|(8<<16)|(2<<0));
CAN2->IER &= 0x00000000;
/*
FIFO1消息掛號中斷使能
FIFO1滿中斷使能
FIFO1溢出中斷使能
*/
CAN2->IER |= ((1<<4)|(1<<5)|(1<<6));
NVIC->IP[65] = 0xa0; //搶占優先級101,響應優先級0
NVIC->ISER[2] |= (1<<1); //使能中斷線65,也就是can2_rx1中斷
CAN2->MCR &= ~(0x00000001);//正常工作模式
//總共有28組過濾器
CAN1->FMR |= 1; //過濾器組工作在初始化模式
CAN1->FMR &= 0xffffc0ff;//CAN2的過濾器組從14開始
CAN1->FMR |= (14<<8);
CAN1->FM1R |= (1<<14);//過濾器組14的寄存器工作在標識符列表模式
//位寬為16位,2個32位分為四個16位寄存器,過濾四個標識符
//CAN1->FS1R |= (1<<15);//過濾器組15為單個32位寄存器,用于擴展標識符
CAN1->FFA1R = 0x0fffc000;//0~13號過濾器組關聯到fifo0,14~27號過濾器組關聯到fifo1
CAN1->FA1R &= ~(1<<14);//禁用過濾器組14
/*
過濾器組0寄存器分為4個十六位過濾器:
標識符列表:
過濾器編號 匹配標準標識符 RTR IDE EXID[17:15]
0 0x7cb(111 1100 1011b) 數據幀 標準標識符 000b
1 0x4ab(100 1010 1011b) 數據幀 標準標識符 000b
2 0x7ab(111 1010 1011b) 數據幀 標準標識符 000b
3 0x40b(100 0000 1011b) 數據幀 標準標識符 000b
*/
CAN1->sFilterRegister[14].FR1 &= 0x00000000;
CAN1->sFilterRegister[14].FR2 &= 0x00000000;
CAN1->sFilterRegister[14].FR1 |= ((0x7cb<<5)|(0<<4)|(0<<3));
CAN1->sFilterRegister[14].FR1 |= ((0x4ab<<21)|(0<<20)|(0<<19));
CAN1->sFilterRegister[14].FR2 |= ((0x7ab<<5)|(0<<4)|(0<<3));
CAN1->sFilterRegister[14].FR2 |= ((0x40b<<21)|(0<<20)|(0<<19));
CAN1->FA1R |= (1<<14);//使能過濾器組14
CAN1->FMR &= ~1; //過濾器組正常工作
while(1)
{
/*
選擇空的發送郵箱:
標準標識符0x7ab(111 1010 1011b)
數據幀
不使用擴展標識符
*/
if( CAN1->TSR & ((1<<26)|(1<<27)|(1<<28)) )
{
empty_box = ((CAN1->TSR>>24) & 0x00000003);
CAN1->sTxMailBox[empty_box].TIR = (0x7ab<<21);
CAN1->sTxMailBox[empty_box].TDTR &= 0xfffffff0;
CAN1->sTxMailBox[empty_box].TDTR |= 0x00000008;//發送數據長度為8
CAN1->sTxMailBox[empty_box].TDLR = 0x12345678;
CAN1->sTxMailBox[empty_box].TDHR = 0x9abcdef0;
CAN1->sTxMailBox[empty_box].TIR |= (1<<0);//請求發送
}
else
{
MyDebugger_LEDs(orange, on);
}
Delay(100);
/*
選擇空的發送郵箱:
標準標識符0x4ab(100 1010 1011b)
數據幀
不使用擴展標識符
*/
if( CAN1->TSR & ((1<<26)|(1<<27)|(1<<28)) )
{
empty_box = ((CAN1->TSR>>24) & 0x00000003);
CAN1->sTxMailBox[empty_box].TIR = (0x4ab<<21);
CAN1->sTxMailBox[empty_box].TDTR &= 0xfffffff0;
CAN1->sTxMailBox[empty_box].TDTR |= 0x00000008;//發送數據長度為8
CAN1->sTxMailBox[empty_box].TDLR = 0x56781234;
CAN1->sTxMailBox[empty_box].TDHR = 0x9abcdef0;
CAN1->sTxMailBox[empty_box].TIR |= (1<<0);//請求發送
}
else
{
MyDebugger_LEDs(orange, on);
}
Delay(100);
/*
選擇空的發送郵箱:
標準標識符0x7cb(100 1010 1011b)
數據幀
不使用擴展標識符
*/
if( CAN1->TSR & ((1<<26)|(1<<27)|(1<<28)) )
{
empty_box = ((CAN1->TSR>>24) & 0x00000003);
CAN1->sTxMailBox[empty_box].TIR = (0x7cb<<21);
CAN1->sTxMailBox[empty_box].TDTR &= 0xfffffff0;
CAN1->sTxMailBox[empty_box].TDTR |= 0x00000006;//發送數據長度為6
CAN1->sTxMailBox[empty_box].TDLR = 0x56781234;
CAN1->sTxMailBox[empty_box].TDHR = 0x00009abc;
CAN1->sTxMailBox[empty_box].TIR |= (1<<0);//請求發送
}
else
{
MyDebugger_LEDs(orange, on);
}
Delay(100);
/*
選擇空的發送郵箱:
標準標識符0x40b(100 0000 1011b)
數據幀
不使用擴展標識符
*/
if( CAN1->TSR & ((1<<26)|(1<<27)|(1<<28)) )
{
empty_box = ((CAN1->TSR>>24) & 0x00000003);
CAN1->sTxMailBox[empty_box].TIR = (0x40b<<21);
CAN1->sTxMailBox[empty_box].TDTR &= 0xfffffff0;
CAN1->sTxMailBox[empty_box].TDTR |= 0x00000004;//發送數據長度為4
CAN1->sTxMailBox[empty_box].TDLR = 0x56781234;
CAN1->sTxMailBox[empty_box].TDHR = 0x00000000;
CAN1->sTxMailBox[empty_box].TIR |= (1<<0);//請求發送
}
else
{
MyDebugger_LEDs(orange, on);
}
Delay(100);
}
}
/****************************************
函數名:CAN_GPIO_config
參數:無
返回值:無
功能:設置CAN1,2控制器用到IO口
CAN1_TX---------PD1
CAN1_RX---------PB8
CAN2_TX---------PB13
CAN2_RX---------PB5
****************************************/
void CAN_GPIO_config()
{
RCC->AHB1ENR |= ((1<<1) | (1<<3));//使能GPIOB、D時鐘
GPIOB->AFR[0] |= 0x00900000; //AF9
GPIOB->AFR[1] |= 0x00900009;
GPIOD->AFR[0] |= 0x00000090;
GPIOB->MODER &= 0xF3FCF3FF; //第二功能
GPIOB->MODER |= 0x08020800;
GPIOD->MODER &= 0xFFFFFFF3;
GPIOD->MODER |= 0x00000008;
GPIOB->OSPEEDR &= 0xF3FCF3FF; //50M
GPIOB->OSPEEDR |= 0x08020800;
GPIOD->OSPEEDR &= 0xFFFFFFF3;
GPIOD->OSPEEDR |= 0x00000008;
GPIOB->PUPDR &= 0xF3FCF3FF; //上拉
GPIOB->PUPDR |= 0x04010400;
GPIOD->PUPDR &= 0xFFFFFFF3;
GPIOD->PUPDR |= 0x00000004;
}
/****************************************
函數名:CAN2_RX1_IRQHandler
參數:無
返回值:無
功能:CAN2fifo1接收中斷處理
把信息存進循環隊列
****************************************/
void CAN2_RX1_IRQHandler()
{
if(CAN2->RF1R & (0x00000003))//接收到新的消息,fifo1非空
{
Producer++;
if(Producer == RECEIVE_BUFFER_SIZE)Producer = 0;
if(Producer != Consumer)
{
CAN2_receive_buffer[Producer][0] = CAN2->sFIFOMailBox[1].RIR;
CAN2_receive_buffer[Producer][1] = CAN2->sFIFOMailBox[1].RDTR;
CAN2_receive_buffer[Producer][2] = CAN2->sFIFOMailBox[1].RDLR;
CAN2_receive_buffer[Producer][3] = CAN2->sFIFOMailBox[1].RDHR;
}
else
{
if(Producer == 0)Producer = RECEIVE_BUFFER_SIZE;
Producer--;
MyDebugger_LEDs(blue, on);
}
CAN2->RF1R |= (1<<5);//釋放郵箱
}
if(CAN2->RF1R & (1<<3))//fifo0滿
{
MyDebugger_LEDs(red, on);
CAN2->RF1R &= ~(1<<3);
}
if(CAN2->RF1R & (1<<4))//fifo0溢出
{
MyDebugger_LEDs(red, on);
CAN2->RF1R &= ~(1<<4);
}
}
/****************************************
函數名:TIM7_init
參數:無
返回值:無
功能:初始化定時器7
作1s定時用
****************************************/
void TIM7_init()
{
RCC->APB1ENR |= (1<<5); //打開TIM7時鐘
TIM7->PSC = 8399; //對時鐘84M進行8400分頻,使得計數頻率為10k
TIM7->ARR = 10000; //定時一秒
TIM7->CNT = 0; //清空計數器
TIM7->CR1 |= (1<<7); //自動重裝載預裝載使能
TIM7->DIER |= 1; //使能中斷
NVIC->IP[55] = 0xe0;
NVIC->ISER[1] |= (1<<(55-32));
TIM7->CR1 |= 1; //開始計時
}
/****************************************
函數名:TIM7_IRQHandler
參數:無
返回值:無
功能:定時器7中斷處理
1s定時到
把can2收到的信息轉換格式
用usrt發送到超級終端顯示
****************************************/
void TIM7_IRQHandler(void)
{
u32 length;
if(TIM7->SR)
{
length = get_rece_data();
MyDebugger_Message( UART_send_buffer, length );
TIM7->SR &= ~(0x0001);
}
}
/****************************************
函數名:get_rece_data
參數:無
返回值:length 整理后要發送數據的長度
功能:把循環隊列的信息取出
進行格式轉換
把信息存到uart發送緩沖區
****************************************/
u32 get_rece_data()
{
u8 filter_No;
u8 Data_length;
char i;
u32 length = 0;
const char ascii[16] = {'0', '1', '2', '3', '4', '5', '6', '7',
'8', '9', 'A', 'B', 'C', 'D', 'E', 'F'};
while(1)
{
if(Producer != Consumer)
{
Consumer++;
if(Consumer == RECEIVE_BUFFER_SIZE)Consumer=0;
UART_send_buffer[length++] = '\n';
UART_send_buffer[length++] = '\r';
//Filter No.xx
UART_send_buffer[length++] = 'F';
UART_send_buffer[length++] = 'i';
UART_send_buffer[length++] = 'l';
UART_send_buffer[length++] = 't';
UART_send_buffer[length++] = 'e';
UART_send_buffer[length++] = 'r';
UART_send_buffer[length++] = ' ';
UART_send_buffer[length++] = 'N';
UART_send_buffer[length++] = 'o';
UART_send_buffer[length++] = '.';
filter_No = (CAN2_receive_buffer[Consumer][1]>>8) & 0x000000ff;
UART_send_buffer[length++] = filter_No%100/10 + '0';
UART_send_buffer[length++] = filter_No%10 + '0';
UART_send_buffer[length++] = '\n';
UART_send_buffer[length++] = '\r';
//DataLength:x
UART_send_buffer[length++] = 'D';
UART_send_buffer[length++] = 'a';
UART_send_buffer[length++] = 't';
UART_send_buffer[length++] = 'a';
UART_send_buffer[length++] = 'L';
UART_send_buffer[length++] = 'e';
UART_send_buffer[length++] = 'n';
UART_send_buffer[length++] = 'g';
UART_send_buffer[length++] = 't';
UART_send_buffer[length++] = 'h';
UART_send_buffer[length++] = ':';
Data_length = CAN2_receive_buffer[Consumer][1] & 0x0000000f;
UART_send_buffer[length++] = Data_length % 10 + '0';
UART_send_buffer[length++] = '\n';
UART_send_buffer[length++] = '\r';
if(CAN2_receive_buffer[Consumer][0] & (1<<1))
{
UART_send_buffer[length++] = 'R';
UART_send_buffer[length++] = 'e';
UART_send_buffer[length++] = 'm';
UART_send_buffer[length++] = 'o';
UART_send_buffer[length++] = 't';
UART_send_buffer[length++] = 'e';
UART_send_buffer[length++] = 'F';
UART_send_buffer[length++] = 'r';
UART_send_buffer[length++] = 'a';
UART_send_buffer[length++] = 'm';
UART_send_buffer[length++] = 'e';
}
else
{
UART_send_buffer[length++] = 'D';
UART_send_buffer[length++] = 'a';
UART_send_buffer[length++] = 't';
UART_send_buffer[length++] = 'a';
UART_send_buffer[length++] = 'F';
UART_send_buffer[length++] = 'r';
UART_send_buffer[length++] = 'a';
UART_send_buffer[length++] = 'm';
UART_send_buffer[length++] = 'e';
}
UART_send_buffer[length++] = '\n';
UART_send_buffer[length++] = '\r';
if(CAN2_receive_buffer[Consumer][0] & (1<<2))
{
UART_send_buffer[length++] = 'e';
UART_send_buffer[length++] = 'x';
UART_send_buffer[length++] = 't';
UART_send_buffer[length++] = ' ';
UART_send_buffer[length++] = 'I';
UART_send_buffer[length++] = 'D';
UART_send_buffer[length++] = ':';
UART_send_buffer[length++] =
ascii[CAN2_receive_buffer[Consumer][0] >> 31];
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][0] >> 27)& 0x0000000f];
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][0] >> 23)& 0x0000000f];
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][0] >> 19)& 0x0000000f];
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][0] >> 15)& 0x0000000f];
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][0] >> 11)& 0x0000000f];
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][0] >> 7)& 0x0000000f];
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][0] >> 3)& 0x0000000f];
}
else
{
UART_send_buffer[length++] = 's';
UART_send_buffer[length++] = 't';
UART_send_buffer[length++] = 'd';
UART_send_buffer[length++] = ' ';
UART_send_buffer[length++] = 'I';
UART_send_buffer[length++] = 'D';
UART_send_buffer[length++] = ':';
UART_send_buffer[length++] =
ascii[CAN2_receive_buffer[Consumer][0] >> 29];
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][0] >> 25)& 0x0000000f];
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][0] >> 21)& 0x0000000f];
}
UART_send_buffer[length++] = '\n';
UART_send_buffer[length++] = '\r';
UART_send_buffer[length++] = 'D';
UART_send_buffer[length++] = 'a';
UART_send_buffer[length++] = 't';
UART_send_buffer[length++] = 'a';
UART_send_buffer[length++] = ':';
if(Data_length > 4)
{
for(i = 2*Data_length - 8; i > 0; i--)
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][3] >> ((i-1)*4))& 0x0000000f];
for(i = 8; i > 0; i--)
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][2] >> ((i-1)*4))& 0x0000000f];
}
else
{
for(i = 2*Data_length; i > 0; i--)
UART_send_buffer[length++] =
ascii[(CAN2_receive_buffer[Consumer][2] >> ((i-1)*4))& 0x0000000f];
}
UART_send_buffer[length++] = '\n';
UART_send_buffer[length++] = '\r';
}
else
break;
}
return length;
}
void Delay(uint32_t nTime)
{
Gb_TimingDelay = nTime;
while(Gb_TimingDelay != 0);
}
void SysTick_Handler(void)
{
if (Gb_TimingDelay != 0x00)
{
Gb_TimingDelay--;
}
}
運行結果:
上一篇:stm32f4使用Systick實現延時
下一篇:stm32F4 時基定時器(2)
推薦閱讀
史海拾趣
為了滿足不斷變化的市場需求,Eurofarad公司始終保持著對產品創新的熱情。公司不斷投入研發資源,開發出了一系列具有競爭力的新產品。這些新產品不僅涵蓋了不同規格和性能的電容器,還包括了一些與電容器相關的配套產品和解決方案。這些創新產品的推出,讓Eurofarad公司在市場中保持了領先地位。
進入21世紀,美高測持續加大在技術研發上的投入,成功研發出具有自主知識產權的VLF(超低頻)測試技術,并應用于變電站設備、中高壓電力電纜等關鍵領域的測試。這項技術不僅提高了測試的準確性和效率,還降低了操作風險,迅速獲得了市場的廣泛認可。公司借此機會,在全球范圍內建立了多個銷售和服務中心,進一步鞏固了其在高壓半導體測試市場的領先地位。
隨著公司規模的擴大和產品線的豐富,Delock公司開始積極拓展國際市場。公司先是在歐美等發達國家設立了辦事處和分銷中心,隨后又逐步進入亞洲、非洲等新興市場。為了更好地滿足全球用戶的需求,Delock公司還針對不同地區的市場特點進行產品定制和營銷策略的調整。這一系列的全球化戰略讓Delock公司的產品在全球范圍內獲得了廣泛的認可和應用。
技術創新是Clover Display Limited得以持續發展的核心動力。公司高度重視研發團隊的建設,不僅在香港設立了一支強大的研發團隊,還不斷引進國內外優秀人才。這些研發人員致力于開發液晶顯示器(LCD)及液晶顯示屏(LCM)的新應用,為公司帶來了眾多具有市場競爭力的產品。在他們的努力下,Clover Display Limited在液晶顯示技術領域取得了多項突破,為公司的快速發展奠定了堅實基礎。
在國內市場取得一定成績后,Corsair開始將目光投向了更廣闊的國際市場。公司積極參加國際電子展會,與海外客戶建立聯系,拓展銷售渠道。同時,Corsair還根據不同國家和地區的市場需求,調整產品策略,提供定制化的解決方案。這些努力使得Corsair的產品逐漸走進了國際市場,公司的影響力也不斷擴大。
隨著市場的不斷發展,Corsair意識到只有不斷創新才能在競爭中立于不敗之地。因此,公司加大了對研發的投入,積極引進先進技術和設備,不斷提升產品的性能和質量。在一次次的嘗試和失敗后,Corsair的研發團隊終于突破了行業技術瓶頸,成功開發出了一款具有高性能、高穩定性的連接器產品。這一創新成果不僅贏得了客戶的青睞,也為公司在行業中樹立了良好的口碑。
|
1、設計無需計算機而能實現資料轉存的設備2、 內容及特點:用51單片機設計一個USB設備間轉存接口,實現資料從一個可移動設備中讀出并寫入另一個可移動設備的功能,解決人們外出旅游等需攜帶筆記本電腦的煩惱。3、設計方法:a) 單片機讀寫USB接口硬 ...… 查看全部問答∨ |
Silicon Labs的全硅振蕩器單芯片Si500,支持從0.9 MHz至200 MHz的任何頻率,其基于CMOS的架構可大幅提高可靠度及性能,由于采用了大量IC制造流程可縮短交貨時間,適用于消費電子、存儲產品、計算機外設、視頻顯示以及工業應用等。請點擊下載本演講 ...… 查看全部問答∨ |
|
/*數碼管前三位顯示一個跑表,從000到999之間以1%秒速度運行 */ #include #define UINT unsigned int #define UCHAR unsigned char sbit s2 = P3 ^ 4; sbit s3 = P3 ^ 5; sbit s4 = P3 ^ 6; sbit s5 = P3 ^ 7; sbit dula = P2 ^ 6; ...… 查看全部問答∨ |
|
|
功能很簡單,有40臺設備,我要在計算機里面采集這些設備幾點運行,幾點關閉,請問有什么好的方案?我是搞計算機編程的不懂電路,請問如何實現?我想的是,拆一個鍵盤,當設備通電時,一直按著某建,比如說,的一臺設備通電運行時我按著a建,第二臺設備運行時我按 ...… 查看全部問答∨ |
IP數據報的最大長度是65535字節,然后它會分片,分成長度為1500字節的片(40多片)傳給MAC層,發送 (1)小弟最近很困惑,假如來了一個接收中斷,那如果接收端的以太網的buffer只有buffer[8][1500]這么大怎么辦? (2)9200手冊上說這個緩沖區 ...… 查看全部問答∨ |
|
看 《tcp/ip詳解卷2》 對 mbuf 中的宏 dtom 不理解 《tcp/ip詳解卷2》中 mbuf 中的宏 dtom 不理解 該宏這樣定義 /* dtom(x) - convert data pointer within mbuf to mbuf pointer (XXX) */ #define dtom(x) & ...… 查看全部問答∨ |

設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析








 A500LN
A500LN- 試用Vishay新型“IHLP磁芯損耗計算器”,搶樓贏好禮
- LPC4370重磅來襲 有獎問答贏好禮!
- 電子工程師,如何更好地擁抱GaN?參與問卷有好禮!
- 報名贏京東卡 | 國產FPGA安路科技2024線上新品發布會
- 兆易GD32450I-EVAL免費測評試用
- 追更有驚喜:解救被FSM折磨過的你,justd0解析LSM6DSOX有限狀態機官方例程
- 電路圖站2.0版上線,公開征集網友建議,填寫調查問卷贏積分!
- 全球首款Cortex-M23內核物聯網芯片SAML10和SAM L11系列 闖關獲取SAML10/SAML11法寶,拆除電子界安全危機,贏好禮!
- 邀請好友體驗WEBENCH,禮品豐厚你有他也有!







 京公網安備 11010802033920號
京公網安備 11010802033920號