1電腦鼠工作原理
電腦鼠周圍安裝六組紅外傳感器,分別感知左方、左前方、前方、右前方、右方,發射端發射一定頻率的紅外線,接收端通過六個方向的反射波來判斷是否有障礙物,實時地儲存單元格的資料,通過六組紅外傳感器反饋的迷宮信息,控制電腦鼠完成避障、轉彎、加速等動作,運用智能算法對迷宮的部分單元格或全部單元格進行遍歷,并將迷宮的信息以有效的數據結構存儲,微控制器根據這些記錄信息運用迷宮高效算法找到一條最優化路徑,從而實現從起點到終點的最大化沖刺。
2 硬件電路設計
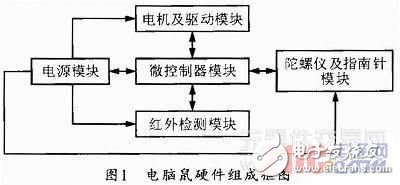
為完成迷宮探測和沖刺任務,電腦鼠需具備以下各功能模塊:ARM微處理器作為控制核心協調各功能模塊正常工作;電機及驅動模塊實時控制電機啟動、制動;紅外檢測模塊負責紅外線探測感知;電源為整個系統供電穩定電壓,陀螺儀及指南針模塊確定電腦鼠方位,根據走過的距離,從而解析出所在坐標。硬件組成如圖1所示。
2.1 電源模塊
電源調節器件通常使用線性穩壓器件(如LM7805),具有輸出電壓可調、穩壓精度高的優點,但是其線性調整工作方式在工作有較大的“熱損耗”,導致電源利用率不高、滿足不了便攜低功耗需求。開關電源調節器,不同于線性穩壓器件,以完全導通或關斷的方式工作,通過控制開關管的導通與截止時間,有效的減少工作中的“熱損耗”,提高了電源利用率。本設計中電源模塊為系統提供三種不同的電壓,12V電源用于驅動電機,使用開關式電源LM2596將12V直流電壓降到5V給紅外模塊、人機交互模塊供電,再通過AMS1117將5V降到3.3V,供ARM處理器及其他模塊使用。
2.2 微處理器模塊
微處理器是整個控制系統的核心,它完成從紅外檢測模塊獲取路徑信息,采集瞬時速度,進行數據處理,控制算法運算,輸出實時控制量等功能。為了保證系統的實用性和易擴展性,本控制系統采用意法半導體推出的“增強型”系列STFM32F103RCT6,STM32F103xx增強型系列使用高性能的ARM Correx-M3 32位的RISC內核,工作頻率為72MHz,內置高速存儲器(高達128K字節的閃存和20K字節的SRAM),豐富的增強I/O端口和聯接到兩條APB總線的外設。所有型號的器件都包含2個12位的ADC、3個通用16位定時器和一個PWM定時器,還包含標準和先進的通信接口:多達2個I2C和SPI、3個USART、一個USB和一個CAN,在存儲容量和運算速度方面滿足要求。
2.3 電機及驅動模塊
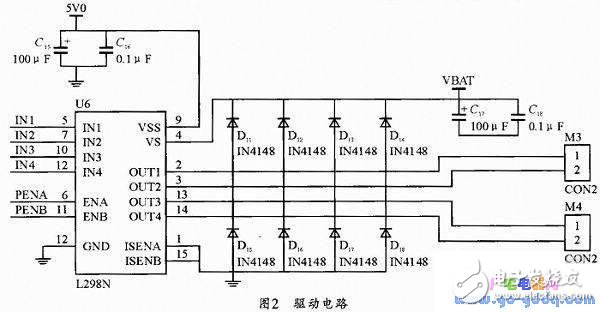
為提高系統功率、降低功耗,驅動電路采用基于脈寬調制方式的集成電路芯片L298N。比較常見的是15腳Muliwart封裝的L298N,內部包含四通道邏輯驅動電路,即內含兩個H橋的高電壓大電流雙全橋式驅動器,可以驅動和控制兩個直流電機,芯片采用供給電機電源和邏輯電平電源的雙電源供電,可接受標準TTL邏輯電平信號,驅動46V,2A以下的電機,并可驅動電感性負載。其中ENA、ENB是控制使能端,IN1、IN 2、IN3、IN4是控制電平輸入端,電路如圖2所示。本設計中采用空心杯直流電機,它具有突出的節能特性、靈敏方便的控制特性和穩定的運行特性,最大效率一般在70%以上,部分產品可達到90%以上;起動、制動迅速,響應極快;其重量、體積相對減少1/3-1/2,通過PWM調節脈沖占空比進行調速。
2.4 紅外檢測模塊
紅外檢測模塊主要負責迷宮環境監測和處理。紅外線經調制后由發射管發出,接收管接收迷宮墻壁反射光,根據接收反射信號強弱來判斷與隔墻的距離。本系統相對傳統紅外檢測方法做如下特點:
(1)紅外傳感器由原來的5組增加到6組。除了正前、正左、正右以及正前方兩個45度斜角外,正前方增加1組紅外傳感器,通過正前方兩組傳感器信息的融合實現路口45度斜走,相對于以往的90度直角調整,節約了時間,提高了效率。
(2)采用基于雙T選頻網絡的放大器設計,紅外傳感器根據反射信號的強弱實現電腦鼠與障礙物之間的測距。以往使用的是一體化紅外接收傳感器(如IRM8601S),其接收頭內部集成自動增益控制電路、帶通濾波電路、解碼電路及輸出驅動電路,但由于檢測信號輸出的是數字信號,只能判斷有或無障礙物,不能根據檢測信號輸出的強度計算距離。本設計中采用基于雙T選頻網絡和TLC084組成的選頻放大設計,實現頻率不同增益不同,對有用信號進行放大處理,濾除或抑制無用信號。
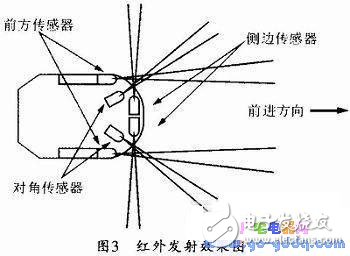
(3)發射三種頻率調制波,減少信號之間的干擾。6組傳感器分為三組,正左和正右兩組傳感器負責檢測電腦鼠是否走在中線上,以便及時做出姿勢校正;左前方和右前方兩組傳感器主要檢查前方是否有路口;前方兩組傳感器配合電機,協同工作實現45度轉彎。紅外光發射頻率越高,傳播距離相對越遠,在本設計中由于迷宮墻壁之間距離16.8cm(單元格18cm.墻壁厚度1.2cm),而電腦鼠的寬度一般為10cm左右,車體距兩邊墻體的距離只有3cm左右,所以正左方和正右方發射頻率選擇為33kHz,左前方和右前方發射35kHz,正前方距離最遠,發射頻率為38kHz。具體如圖3所示。
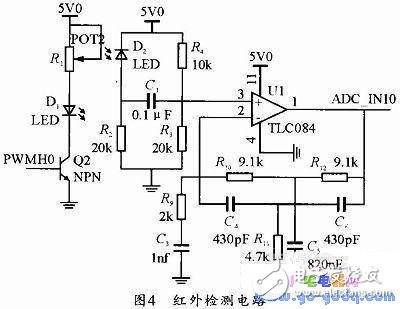
本設計進行了硬件電路改進,由STM32定時器輸出三路PWM信號,每兩組紅外發射管共用一路PWM信號,遇到障礙物后返回,紅外接收管進行信號采集,通過選頻放大器對有用信號進行放大處理,送入STM32的12位逐次逼近型AD轉換器。由于整流濾波有延時,所以此處采用交流采樣,ADC在最高速采樣的時候需要1.5十12.5個ADC周期,在14M的ADC時鐘下達到1MSPs的速度。紅外測距電路如圖4所示,當接收管接收到紅外線,D2導通,并且反射越強,D2阻值越小,沒有收到紅外線時,D2阻值無窮大,相當于截止;R3和R4兩個10K電阻提供2.5V的直流偏置。
3 軟件系統設計
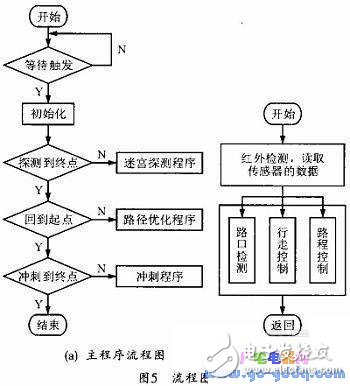
軟件模塊是系統的重要組成部分,電腦鼠通過紅外檢測獲取周圍信息,完成前進、轉彎、沖刺、停止等基本動作,此外還要通過以獲取信息實現最優路徑的搜尋并完成最后的沖刺。本設計才用模塊化設計,通過主程序調用各個功能子程序,主程序流程圖和中斷流程圖如圖5(a)(b)所示。
4 實驗驗證及分析
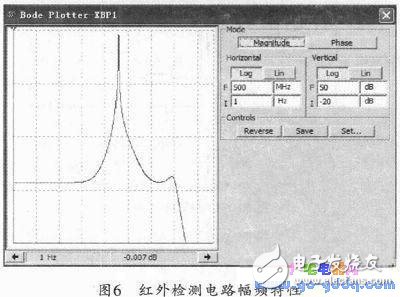
(1)紅外傳感器測距系統中使用基于選頻網絡的放大設計,由于電阻電容選用國標,無法使中心頻率恰好落在38kHz,雙T選頻網絡中心頻率f0=1/2πRC,選擇R/C=10k/430pF,f0=37kHz,用mulTIsim仿真出的幅頻特性如圖6所示,搭建硬件實驗電路,中心頻率并未落在37kHz而是30kHz,減小RC值多次試驗,當R/C=9.1k/430pF,中心頻率落在38kHz。
(2)迷宮墻壁由空心的白色塑料做成,有很大一部分紅外光發生透射,加之日光影響,因此如法給發射管套用黑色外管,減少外界干擾;由ARM微處理器產生PWM信號送人紅外發射管,接收管接收經過調制的紅外信號;用三極管實現電平轉換,調節電位器增加發射功率,使信號調整放大到A/D轉換的最佳量程范圍內,獲得期望的處理精度。通過實驗多次測量,得到一組紅外測量距離與輸出電壓的數據,以障礙物距離S為橫坐標,選頻放大后的電壓值U為縱坐標,用matlab繪制曲線,電壓值與距離關系式為U=0.1195+4.5962*S-1,如圖7所示。
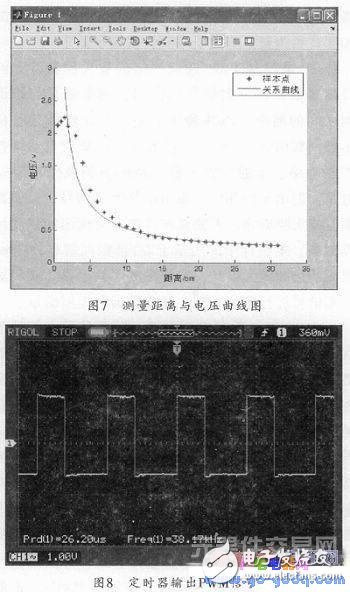
(4)利用STM32定時器功能,通過軟件編程調制出需要的PWM信號,以此控制電機、發射紅外,圖8是TImer4的CH1通道輸出頻率為38kHz,占空比為30%的PWM信號。
5 結束語
本文設計了基于STM32F103RCT6的電腦鼠控制系統,在matlab、muhisim仿真基礎上,確定了選頻網絡的RC參數,并通過實驗得到距離與電壓值的關系圖,體現了對稱RC雙T網絡良好的選頻特性;電機及驅動模塊選用效率高、響應快的空心杯直流電機。經試驗驗證,該設計方案可以滿足系統要求。
上一篇:將μC/OS-II移植到AndesCore? N1033A-S處理器
下一篇:7個基于STM32單片機的精彩設計實例
推薦閱讀
史海拾趣
近年來,智能制造成為電子行業的新趨勢。FCT Electronics緊跟時代步伐,開始探索智能制造領域。公司引進了先進的自動化生產線和檢測設備,提高了生產效率和產品質量。同時,FCT Electronics還積極開發智能測試系統,為客戶提供更加便捷、高效的服務。這一轉型不僅提升了公司的市場競爭力,也為未來的發展打開了新的空間。
上述五個故事,僅基于公開信息和電子行業的一般發展趨勢構建,并非FCT Electronics公司的真實歷史事件。如需了解FCT Electronics公司的真實發展情況,請查閱相關官方資料。
EM Devices Corporation的創始人在電子工程領域有著深厚的背景,他們看到了當時市場上對高性能電子元件的迫切需求。于是,他們決定創辦EM Devices Corporation,專注于研發和生產高質量的電子元件。起初,公司面臨了資金、技術和市場等多方面的挑戰。然而,憑借創始人對技術的執著追求和對市場的敏銳洞察,公司成功研發出了一款具有競爭力的產品,并逐漸在市場上獲得了認可。
在產品研發取得突破的同時,EM Devices Corporation也積極拓展市場,尋求與國際企業的合作。公司參加了多個國際電子展,展示了自己的產品和技術實力。通過與國外企業的交流與合作,公司不僅獲得了更多的市場機會,還學習到了先進的生產和管理經驗。這些經驗為公司后續的發展奠定了堅實的基礎。
隨著電子行業的快速發展,網絡安全問題日益突出。CQR SECURITY公司敏銳地捕捉到了這一市場機遇,迅速調整戰略方向,專注于提供針對電子設備的安全保護服務。公司研發了一系列高效的安全產品,有效應對了各類網絡攻擊和數據泄露事件。在不斷應對行業挑戰的過程中,CQR逐漸積累了豐富的安全實踐經驗,并贏得了客戶的信賴和認可。
在激烈的市場競爭中,CQR SECURITY公司不斷探索創新服務模式。公司推出了基于云計算的安全服務平臺,為客戶提供更加便捷、高效的安全服務。同時,CQR還加強了對客戶需求的深入了解,量身定制安全解決方案,滿足客戶的個性化需求。這種創新服務模式不僅提升了客戶滿意度,還為CQR帶來了更多的商業機會。
DIALIGHT公司一直專注于工業LED照明領域的發展。他們深入了解工業空間照明的需求和挑戰,設計了一系列專為工業應用而定制的LED照明產品。這些產品不僅易于安裝和維護,而且能在惡劣的環境下持續使用。此外,DIALIGHT還提供集成系統解決方案,幫助客戶降低能源成本、維護成本和碳足跡,同時提高設施的安全性和生產力。通過不斷創新和優質服務,DIALIGHT在工業LED照明領域贏得了廣泛的認可和信賴。
|
最近在做無限傳輸的方案,用的是ATMEGA16單片機和nRF905芯片,不知道能不能用ATTINY26代替ATMEGA16,我是菜鳥哈,多謝大蝦的幫助!… 查看全部問答∨ |
|
|
市調機構iSuppli公布了2009年度全球半導體行業20大廠商的初步統計報告。雖然整個產業愁云慘淡,前十名中只有一家保持了增長,所有20名中也僅僅三家沒有倒退,但好消息是:一切原本可以更糟糕得多的。 ...… 查看全部問答∨ |
2.4G無線電力測溫解決方案 一,方案概述 2.4G無線電力測溫解決方案是面向變電站、電廠客戶開發的工業測溫解決方案,主要解決電力柜溫度檢測。配合一個或者多個無線傳感器節點,可為用戶提供先進的無線傳感應用。該設備可以記錄運行溫度濕度,運行 ...… 查看全部問答∨ |
|
一直沒用過DEBUG版的NK,今天編譯后出現錯誤: kitl.lib(ethdbg.obj) : error LNK2001: unresolved external symbol dpCurSettings 是在編譯kernel\\kernkitlprof 的時候出現的! 我把這release版的kernkitlprof copy到debug下! m ...… 查看全部問答∨ |
如何大建短信平臺,可以接受用戶發送來的消息??求各位大俠給點建議,具體做些什么樣的準備工作,以及需要購買什么樣的設備,如何開發等。。。。… 查看全部問答∨ |
|
很多人對C2000很感興趣,并很想有塊開發板。 本帖僅為征求意見,如果響應的人多,就組織壇子里有經驗的能手和大家一起制作開發板,整個過程將以零利潤(轉手價為零)、純義務(技術設計、組織實施、材料寄送(郵費除外)等)的方式進行。 對于更 ...… 查看全部問答∨ |



設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析








 AZ696-1A-5D
AZ696-1A-5D






 京公網安備 11010802033920號
京公網安備 11010802033920號