


為實(shí)現(xiàn)X-Y-Z三維工作臺(tái)的精確定位,設(shè)計(jì)了一種基于STM32F103VCT6單片機(jī)和步進(jìn)電機(jī)的三維微位移控制系統(tǒng)。該系統(tǒng)可與上位機(jī)實(shí)現(xiàn)串口通信,接收上位機(jī)命令并把處理結(jié)果反饋給上位機(jī);根據(jù)光柵傳感器提供的位置反饋信息,系統(tǒng)可以通過對(duì)步進(jìn)電機(jī)的方向、速度調(diào)節(jié)來實(shí)現(xiàn)精確定位;采用勻加速和勻減速方式對(duì)步進(jìn)電機(jī)的速度進(jìn)行調(diào)節(jié),避免了因步進(jìn)電機(jī)的突然加速和急停所帶來的丟步和沖擊現(xiàn)象。控制系統(tǒng)的測(cè)量實(shí)驗(yàn)結(jié)果表明,步進(jìn)電機(jī)運(yùn)行平穩(wěn),噪音低,定位精度高,控制系統(tǒng)性能穩(wěn)定可靠。
微位移控制系統(tǒng)是一種集機(jī)械、光學(xué)、電子和計(jì)算機(jī)等多種技術(shù)于一體的智能化儀器。在先進(jìn)制造技術(shù)與科學(xué)研究中有著極其廣泛的應(yīng)用,也是現(xiàn)代工業(yè)檢測(cè)、質(zhì)量控制和制造技術(shù)中不可或缺的測(cè)量設(shè)備。微位移控制系統(tǒng)一般由微定位機(jī)構(gòu)、微位移檢測(cè)裝置和控制器組成。控制器是微位移系統(tǒng)的指揮中心,它按照一定的控制算法控制微定位平臺(tái),使其按照一定的規(guī)律運(yùn)動(dòng),來實(shí)現(xiàn)精確定位。
傳統(tǒng)的三維微位移控制系統(tǒng)一般采用步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲杠來實(shí)現(xiàn)定位。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即每施加一個(gè)脈沖信號(hào),電機(jī)就轉(zhuǎn)動(dòng)一個(gè)步距角,因此脈沖數(shù)與電機(jī)轉(zhuǎn)動(dòng)的總步進(jìn)角度是呈線性關(guān)系的。另外,步進(jìn)電機(jī)只有周期性的誤差而無累積誤差,使得在速度、位置等控制領(lǐng)域用步進(jìn)電機(jī)控制變得非常簡(jiǎn)單。步進(jìn)電機(jī)開環(huán)控制系統(tǒng)主要優(yōu)點(diǎn)是結(jié)構(gòu)簡(jiǎn)單,在控制精度要求不高的場(chǎng)合應(yīng)用較為廣泛,但是在實(shí)際應(yīng)用中,若步進(jìn)電機(jī)升、降速控制不合理,會(huì)造成步進(jìn)電機(jī)丟步或過沖;在開環(huán)控制系統(tǒng)中,由于步進(jìn)電機(jī)丟步現(xiàn)象的存在,無法獲知它是否精確地到達(dá)了預(yù)定位置,也就無法實(shí)現(xiàn)高精度的定位。
為實(shí)現(xiàn)三維工作臺(tái)的精確定位,系統(tǒng)采用步進(jìn)電機(jī)閉環(huán)控制系統(tǒng)。系統(tǒng)中,利用光柵傳感器的輸出作為微位移控制系統(tǒng)的位置反饋信號(hào),實(shí)現(xiàn)閉環(huán)控制。光柵傳感器的分辨率為1μm,自帶讀數(shù)頭,可直接輸出TTL電平或正弦波信號(hào),為信號(hào)處理和與控制系統(tǒng)連接提供了便利。控制系統(tǒng)通過光柵傳感器反饋信號(hào)來判斷是否達(dá)到了預(yù)定位置,進(jìn)而做出相應(yīng)的調(diào)整動(dòng)作。從而達(dá)到精確定位的目的。
1 硬件電路設(shè)計(jì)
1.1 微位移控制系統(tǒng)總體設(shè)計(jì)
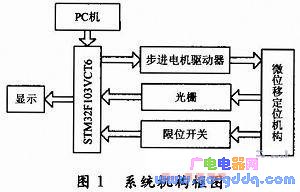
根據(jù)微位移控制系統(tǒng)的設(shè)計(jì)要求,首先應(yīng)保證控制系統(tǒng)的定位精度,其次應(yīng)盡量做到結(jié)構(gòu)簡(jiǎn)單,成本低,操作簡(jiǎn)便。基于上述考慮,本文設(shè)計(jì)了如圖1所示的微位移控制系統(tǒng)。其中,采用STM32F103VCT6單片機(jī)作為控制核心和數(shù)據(jù)處理器,基于THB7128驅(qū)動(dòng)芯片設(shè)計(jì)驅(qū)動(dòng)電路;定位系統(tǒng)采用電動(dòng)平移臺(tái),由步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲杠進(jìn)行定位,重復(fù)定位精度可以達(dá)到3μm;上位機(jī)采用VB進(jìn)行程序設(shè)計(jì),實(shí)現(xiàn)各種控制命令的發(fā)送、數(shù)據(jù)處理、數(shù)據(jù)顯示等功能;通信方式采用RS 232串行通信,協(xié)議簡(jiǎn)單,操作方便。
1.2 控制系統(tǒng)外圍電路設(shè)計(jì)
STM32系列單片機(jī)是基于嵌入式ARM Cortex-M3內(nèi)核的32位微處理器,工作頻率為72 MHz,內(nèi)置高速存儲(chǔ)器(包括256 KB的閃存和48 KB的SRAM),含有豐富的增強(qiáng)型I/O端口和連接兩條APB總線的外設(shè),還包含3個(gè)12位的ADC、4個(gè)通用16位定時(shí)器和2個(gè)PWM定時(shí)器,還包含標(biāo)準(zhǔn)和先進(jìn)的通信接口:2個(gè)I2C,3個(gè)SPI,2個(gè)I2S,1個(gè)SDIO,3個(gè)USART,1個(gè)USB和1個(gè)CAN。控制系統(tǒng)外圍電路圖如圖2所示。
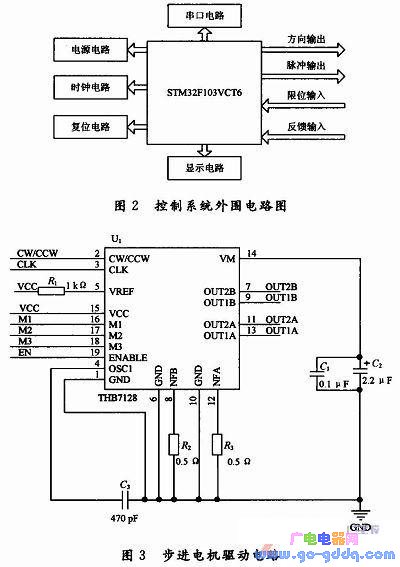
控制系統(tǒng)驅(qū)動(dòng)的步進(jìn)電機(jī)為兩相四線制步進(jìn)電機(jī),硬件配置上,E口的12~14腳負(fù)責(zé)控制步進(jìn)電機(jī)的運(yùn)動(dòng)方向,A口的1,8腳和B口的0腳作為步進(jìn)電機(jī)脈沖輸出。輸出信號(hào)通過74LV245進(jìn)行輸出,提高相應(yīng)的驅(qū)動(dòng)能力;D口的8~13腳為限位開關(guān)輸入,B口的6,7腳為光柵反饋信號(hào)輸入,輸入信號(hào)通過光電耦合的方式輸入,具有良好的電絕緣能力,同時(shí)也提高系統(tǒng)工作的穩(wěn)定性。
1.3 步進(jìn)電機(jī)驅(qū)動(dòng)電路設(shè)計(jì)
步進(jìn)電機(jī)驅(qū)動(dòng)電路基于THB7128進(jìn)行設(shè)計(jì),如圖3所示。具有以下特點(diǎn):采用雙全橋MOSFET驅(qū)動(dòng),低導(dǎo)通電阻RoN=0.53 Ω;最高耐壓為40 VDC,最大電流為3.3 A(峰值);多種細(xì)分可選(1,1/2,1/4,1/8,1/16,1/32,1/64,1/128);自動(dòng)半流鎖定功能;內(nèi)置混合
式衰減模式;內(nèi)置輸入下拉電阻;內(nèi)置溫度保護(hù)及過流保護(hù)。
1.4 反饋電路
STM32單片機(jī)的定時(shí)器有對(duì)于反饋信號(hào)特定的工作模式,即編碼器接口模式。編碼器接口模式基本上相當(dāng)于使用了一個(gè)帶有方向選擇的外部時(shí)鐘。這意味著計(jì)數(shù)器只在0到TIMx_ARR寄存器的自動(dòng)裝載值之間連續(xù)計(jì)數(shù)(根據(jù)方向,或是0到ARR計(jì)數(shù),或是ARR到0計(jì)數(shù))。所以在開始計(jì)數(shù)之前必須配置TIMx_ARR;同樣,捕獲器、比較器、預(yù)分頻器、觸發(fā)輸出特性等仍正常工作。在這個(gè)模式下,計(jì)數(shù)器依照增量編碼器的速度和方向被自動(dòng)地修改,因此計(jì)數(shù)器的內(nèi)容始終指示著編碼器的位置。計(jì)數(shù)方向與相連的傳感器旋轉(zhuǎn)的方向?qū)?yīng)。
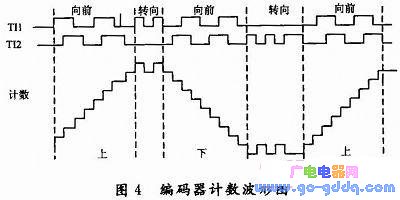
圖4是一個(gè)計(jì)數(shù)器操作的實(shí)例,顯示了計(jì)數(shù)信號(hào)的產(chǎn)生和方向控制,還顯示了當(dāng)選擇雙邊沿時(shí),輸入抖動(dòng)是如何被抑制的;抖動(dòng)可能會(huì)在傳感器的位置靠近一個(gè)轉(zhuǎn)換點(diǎn)時(shí)產(chǎn)生。在這個(gè)例子中,假定配置如下:
CC1S=01 (TIMx_CCMR1寄存器,IC1FP1映射到TI1)
CC2S=01 (TIMx_CCMR2寄存器,IC2FP2映射到TI2)
CC1P=0 (TIMx_CCER寄存器,IC1FP1不反相,IC1FP1=TI1)
CC2P=0 (TIMx_CCER寄存器,IC2FP2不反相,IC2FP2=TI2)
SMS=011 (TIMx_SMCR寄存器,所有的輸入均在上升沿和下降沿有效),
CEN=1 (TIMx_CR1寄存器,計(jì)數(shù)器使能)
2 系統(tǒng)軟件設(shè)計(jì)
2.1 上位機(jī)軟件設(shè)計(jì)
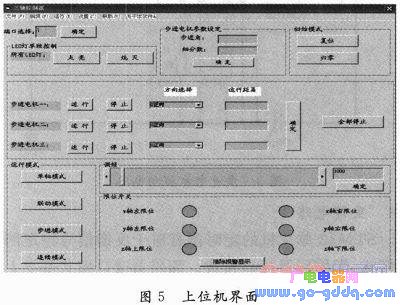
上位機(jī)界面基于VB進(jìn)行設(shè)計(jì),包括初始狀態(tài)設(shè)定,步進(jìn)電機(jī)命令輸入,運(yùn)行模式選擇,調(diào)頻的實(shí)現(xiàn),限位開關(guān),反饋顯示,如圖5所示。
2.2 下位機(jī)軟件設(shè)計(jì)
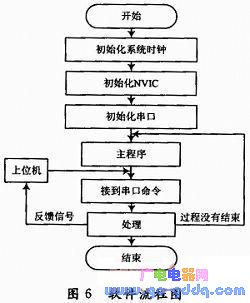
下位機(jī)程序基于RealView MDK開發(fā)環(huán)境進(jìn)行開發(fā)。RealView MDK集成了業(yè)內(nèi)最領(lǐng)先的技術(shù),包括μVision3集成開發(fā)環(huán)境與RealView編譯器。支持ARM7、ARM9和最新的Cortex-M3核處理器,自動(dòng)配置啟動(dòng)代碼,集成FLASH燒寫模塊,強(qiáng)大的Simulation設(shè)備模擬,性能分析等功能。程序采用模塊化設(shè)計(jì),在主函數(shù)中實(shí)現(xiàn)系統(tǒng)的時(shí)鐘配置、中斷配置、通用輸入/輸出配置、硬件初始化和用戶函數(shù)的調(diào)用。用戶函數(shù)包括步進(jìn)電機(jī)運(yùn)動(dòng)程序、反饋信號(hào)處理程序、限位信號(hào)處理程序、頻率調(diào)節(jié)程序等。驅(qū)動(dòng)步進(jìn)電機(jī)所需的脈沖由定時(shí)器中斷產(chǎn)生。定時(shí)器工作模式的向上計(jì)數(shù)模式,當(dāng)計(jì)數(shù)器溢出時(shí)產(chǎn)生更新事件。所有的寄存器都被更新,計(jì)數(shù)器重新開始計(jì)數(shù)。在程序中設(shè)置脈沖啟動(dòng)頻率為50 Hz,加減速頻率為50 Hz/脈沖,可以改善步進(jìn)電機(jī)運(yùn)動(dòng)的平穩(wěn)性,流程圖如圖6所示。
2.3 串口通信協(xié)議的編寫
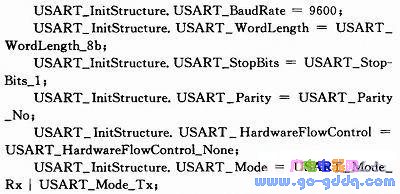
上位機(jī)與下位機(jī)通信采用串口通信,波特率為9 600 b/s、8位數(shù)據(jù)、一個(gè)停止位、無校驗(yàn)、無流量控制、接收發(fā)使能。
上位機(jī)與下位機(jī)之間的控制命令采用9個(gè)字節(jié)每幀,包括電機(jī)選擇、命令、數(shù)據(jù)、校驗(yàn)等。
3 實(shí)驗(yàn)
在微位移系統(tǒng)測(cè)量實(shí)驗(yàn)過程中,采用步進(jìn)電機(jī)步進(jìn)角為1.8°;步進(jìn)電機(jī)驅(qū)動(dòng)器為8細(xì)分;定位機(jī)構(gòu)滾珠絲杠導(dǎo)程為4 mm;光柵傳感器分辨率為1μm。理論上每發(fā)一個(gè)脈沖絲杠移動(dòng)2.5μm。發(fā)送為20 000個(gè)脈沖,脈沖頻率2 000 Hz。理論上光柵傳感器產(chǎn)生50 000個(gè)脈沖。控制系統(tǒng)對(duì)反饋信號(hào)進(jìn)行計(jì)數(shù),并發(fā)送偏差命令進(jìn)行實(shí)時(shí)修正直到最后達(dá)到預(yù)定位置。同時(shí)也進(jìn)行了速度調(diào)節(jié)實(shí)驗(yàn),步進(jìn)電機(jī)運(yùn)行平穩(wěn),驗(yàn)證了系統(tǒng)的可靠性。
4 結(jié)論
基于STM32F103VCT6單片機(jī)的微位移控制系統(tǒng)實(shí)現(xiàn)了對(duì)上位機(jī)命令的響應(yīng)、處理及數(shù)據(jù)交互。通過接收上位機(jī)發(fā)送的各種命令,STM32F 103VCT6單片機(jī)控制系統(tǒng)產(chǎn)生相應(yīng)的控制信號(hào),并通過步進(jìn)電機(jī)帶動(dòng)滾珠絲杠完成規(guī)定的動(dòng)作。同時(shí)通過處理位置反饋信號(hào)來判斷運(yùn)動(dòng)是否到位,使三維微位移系統(tǒng)的運(yùn)動(dòng)精度大大提高。而且步進(jìn)電機(jī)采用升、降速控制,避免了步進(jìn)電機(jī)的直接啟動(dòng)與急停,大大地改善了步進(jìn)電機(jī)運(yùn)動(dòng)的平穩(wěn)性,而且輸出脈沖頻率可以在20 kHz以內(nèi)調(diào)節(jié),具有很寬的速度范圍,具有很強(qiáng)的適應(yīng)性。整體上滿足了微位移控制系統(tǒng)的要求。
上一篇:基于ARM核的AT91SAM7X256的TWI接口控制方法
下一篇:基于STM32F107VCT6微控制器的控制系統(tǒng)設(shè)計(jì)
推薦閱讀
史海拾趣
Amveco Toroidal Power Products公司成立于XXXX年,初始階段主要專注于環(huán)形變壓器的研發(fā)與生產(chǎn)。創(chuàng)始人憑借對(duì)環(huán)形變壓器技術(shù)的深入了解和市場(chǎng)需求的敏銳洞察,帶領(lǐng)團(tuán)隊(duì)克服了初創(chuàng)期的種種困難,成功開發(fā)出了具有高效能、低噪音特點(diǎn)的環(huán)形變壓器產(chǎn)品,并贏得了客戶的初步認(rèn)可。隨著市場(chǎng)口碑的逐漸積累,公司的業(yè)務(wù)規(guī)模開始穩(wěn)步擴(kuò)大。
在電子行業(yè)中,EWC Controls公司選擇了工業(yè)自動(dòng)化控制這一細(xì)分領(lǐng)域作為切入點(diǎn)。通過深入了解行業(yè)需求和痛點(diǎn),公司專注于研發(fā)和生產(chǎn)符合市場(chǎng)需求的高品質(zhì)產(chǎn)品。例如,在食品加工行業(yè),EWC Controls公司針對(duì)溫度、濕度等關(guān)鍵參數(shù)的控制需求,開發(fā)出了一套高效穩(wěn)定的控制系統(tǒng),幫助食品加工企業(yè)提高了生產(chǎn)效率和產(chǎn)品質(zhì)量。這種深耕行業(yè)、專注細(xì)分領(lǐng)域的策略使得EWC Controls公司在市場(chǎng)中逐漸嶄露頭角。
隨著電子測(cè)量技術(shù)的不斷發(fā)展,BK Precision開始將業(yè)務(wù)重心轉(zhuǎn)向測(cè)試和測(cè)量?jī)x器的研發(fā)與生產(chǎn)。工程師團(tuán)隊(duì)通過不懈努力,打破技術(shù)壁壘,成功開發(fā)出一系列高質(zhì)量的測(cè)量?jī)x器。這些產(chǎn)品在市場(chǎng)上取得了巨大的成功,BK Precision逐漸在電子量測(cè)產(chǎn)業(yè)中嶄露頭角。此外,公司還積極尋求與其他電子公司的合作,通過合并與收購(gòu)等方式,不斷拓展業(yè)務(wù)范圍和市場(chǎng)份額。
隨著Eclipse項(xiàng)目的不斷發(fā)展,越來越多的知名公司加入到這一開源社區(qū)中,如Oracle、Red Hat等。這些公司不僅為Eclipse貢獻(xiàn)了代碼,還提供了資金支持。Eclipse的功能日益完善,逐漸成為了Java開發(fā)領(lǐng)域的佼佼者。同時(shí),Eclipse也支持其他編程語言,如C/C++、Python等,進(jìn)一步擴(kuò)大了其用戶群體。
在電子行業(yè)發(fā)展的浪潮中,愛普特半導(dǎo)體(APTSEMI)始終堅(jiān)持自主創(chuàng)新的發(fā)展道路。公司自創(chuàng)立之初,就致力于研發(fā)具有自主知識(shí)產(chǎn)權(quán)的微處理器芯片。面對(duì)國(guó)外技術(shù)封鎖和市場(chǎng)壟斷的困境,愛普特團(tuán)隊(duì)不畏艱難,投入大量研發(fā)資源,成功突破了多項(xiàng)技術(shù)難關(guān),研發(fā)出了全國(guó)產(chǎn)、高可靠性的32位MCU產(chǎn)品。這些產(chǎn)品性能卓越,可與國(guó)際先進(jìn)水平相媲美,為我國(guó)電子行業(yè)的自主可控發(fā)展貢獻(xiàn)了重要力量。
華銘智能是一家在ETC領(lǐng)域具有深厚技術(shù)積累的企業(yè)。為了推動(dòng)ETC行業(yè)的發(fā)展,華銘智能積極尋求跨界合作的機(jī)會(huì)。公司與多家汽車制造商、智能交通系統(tǒng)提供商等建立了緊密的合作關(guān)系,共同研發(fā)和推廣ETC技術(shù)。通過跨界合作,華銘智能不僅拓展了自身的業(yè)務(wù)范圍,還推動(dòng)了ETC技術(shù)在更多領(lǐng)域的應(yīng)用。
|
本帖最后由 jameswangsynnex 于 2015-3-3 19:59 編輯 暖手器具有攜帶方便、取暖衛(wèi)生、保溫時(shí)間長(zhǎng),使用不帶電、安全可靠等優(yōu)點(diǎn)。不僅適用于取暖,而且還可以用來局部理療。作為一種小家電,其結(jié)構(gòu)簡(jiǎn)單,維修比較容易,本文提供自已動(dòng)手維修暖手器 ...… 查看全部問答∨ |
AVR學(xué)習(xí)筆記1:8種LED點(diǎn)亮模式(ICC) 一、程序結(jié)構(gòu) (原文件名:程序結(jié)構(gòu).jpg) 二、仿真效果 (原文件名:仿真效果.jpg) 三、程序源碼 1、main.c /*************************************************************************** Pl ...… 查看全部問答∨ |
|
USB無線網(wǎng)卡驅(qū)動(dòng)顯示黃色嘆號(hào)的問題 起初安裝時(shí)正常,反復(fù)拔插設(shè)備,驅(qū)動(dòng)顯示黃色嘆號(hào)。請(qǐng)問這可能是什么導(dǎo)致的啊?… 查看全部問答∨ |
|
|
測(cè)量了傳感器的電阻,在不同的的水位,電阻值都會(huì)緩慢的上升,最終都是60k或接近,請(qǐng)問這是什么原理,或者是測(cè)量方法不對(duì). 現(xiàn)在設(shè)計(jì)一個(gè)電路,可以測(cè)溫度,也可以測(cè)水位。測(cè)溫度,就是用測(cè)量電阻,然后轉(zhuǎn)換為頻率,單片機(jī)檢測(cè)接收。測(cè)量水位,看到 ...… 查看全部問答∨ |
|
|
camera驅(qū)動(dòng)中關(guān)于config.bib配置的問題 請(qǐng)教各位大俠一個(gè)問題:我用的是2440的板子 在camera驅(qū)動(dòng)中,有一個(gè)定義DMA緩存區(qū)地址的語句:#define COPIFRAMEBUFFER_A 0x30088000 。這個(gè)0x30088000根據(jù)我的理解對(duì)應(yīng)的應(yīng)該是config.bib中的 &nb ...… 查看全部問答∨ |
|
|
求周啟平的《VxWorks下設(shè)備驅(qū)動(dòng)程序及BSP開發(fā)指南》 由于剛接觸,覺得這本書不錯(cuò),今天跑遍了各個(gè)書店都沒找著,不知哪位有電子版的啊,或者給出下載網(wǎng)址也行,謝謝了!… 查看全部問答∨ |






設(shè)計(jì)資源 培訓(xùn) 開發(fā)板 精華推薦
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯(cuò)誤問題解析
- 【下載】LAT1473 STM32C0 HAL庫(kù)的SPI 驅(qū)動(dòng)導(dǎo)致的Hardfault問題分析
- 【下載】LAT1490 兩個(gè)STM32G0 I2C 通信異常的案例分析
- 【下載】LAT1470 SPI傳輸長(zhǎng)度超過1024時(shí)出現(xiàn)異常的問題分析

- 英飛凌穩(wěn)居微控制器領(lǐng)域榜首,鞏固其在全球車用半導(dǎo)體市場(chǎng)的領(lǐng)導(dǎo)地位
- 迅為imx6ull開發(fā)板使用c語言調(diào)用shell命令控制led燈
- 迅為IMX8MM開發(fā)板Android編譯環(huán)境搭建
- 迅為IMX6ULL開發(fā)板NFS服務(wù)器的使用
- 迅為ITOP4412開發(fā)板Qt界面添加圖片
- 迅為IMX6開發(fā)板OTA遠(yuǎn)程升級(jí)-SWUpdata概述和使用
- 迅為IMX6ULL開發(fā)板NFS服務(wù)器的搭建
- 迅為IMX6開發(fā)板Buildroot文件系統(tǒng)4G撥號(hào)上網(wǎng)工具測(cè)試
- 實(shí)驗(yàn)分享丨迅為IMX6ULL開發(fā)板點(diǎn)亮第一個(gè)led燈







 2980720
2980720- OpenCV行人檢測(cè)--基于米爾全志T527開發(fā)板
- 神經(jīng)技術(shù)的潛能:貿(mào)澤EIT系列探索技術(shù)與思維交會(huì)點(diǎn)的腦機(jī)接口
- TE Connectivity在推動(dòng)長(zhǎng)期可持續(xù)發(fā)展目標(biāo)方面取得顯著進(jìn)展
- 世索科攜一系列用于半導(dǎo)體制造的先進(jìn)材料亮相Semicon China 2025
- TITAN Haptics助力中國(guó)健康產(chǎn)業(yè)的革新
- 汽車線束布置的四大注意事項(xiàng)
- 什么原因?qū)е缕囉秃母吆秃桶l(fā)動(dòng)機(jī)轉(zhuǎn)速高
- 莫仕的電容式背光設(shè)計(jì)在汽車應(yīng)用的五大設(shè)計(jì)挑戰(zhàn)與方案
- 關(guān)于車載Ethernet降噪措施的必要性
- 學(xué)子專區(qū)論壇- ADALM2000實(shí)驗(yàn):脈寬調(diào)制
- Microchip 喊你快來打造你的理想型單片機(jī),智能門鈴、百元京東卡等【80份】好禮等你贏!
- 高性能手機(jī)設(shè)計(jì)如何實(shí)現(xiàn)?手機(jī)高校評(píng)估研討會(huì)為您揭曉答案!
- 了解TE CONNECTIVITY室外照明連接解決方案精彩專題,參與有好禮!
- 助力電賽,搶樓有禮啦~~
- 2020 STM32全國(guó)研討會(huì)火熱報(bào)名中,新技術(shù)新方案等你收獲,還有好禮拿!
- 免費(fèi)申請(qǐng)|中科億海微神針系列FPGA開發(fā)板EQ6HL45 1V0
- 羅姆有獎(jiǎng)直播 | 高輸出功率激光二極管—助力激光雷達(dá)性能提升
- 助推電動(dòng)時(shí)代,與英飛凌一起探索電動(dòng)汽車三大產(chǎn)品技術(shù)
- 華為做憶阻器?曾兩度申請(qǐng)專利
- 2022年互聯(lián)汽車將達(dá)1.25億輛,5G汽車最快2020年上市
- 榮耀Play 4T系列發(fā)布,4800萬主攝售價(jià)1199元起
- TRINAMIC公司CEO:專注與專業(yè)是公司成功秘笈
- 正面對(duì)決微信?運(yùn)營(yíng)商力推測(cè)“5G消息”背后的盤算
- 風(fēng)口之上,車聯(lián)網(wǎng)系統(tǒng)到底會(huì)不會(huì)是“另一個(gè)”智能手機(jī)系統(tǒng)?
- Science封面里程碑研究:納米級(jí)成像,人類終于看清大腦每個(gè)神經(jīng)元
- 官宣:2018動(dòng)力電池成績(jī)單和問題單
- 英特爾即將推出全新核顯控制面板
- 你期待的是什么?盤點(diǎn)2019年重磅PC硬件和技術(shù)
- ESP32經(jīng)驗(yàn)帖合集,學(xué)習(xí)ESP32的網(wǎng)友可以看看
- NIOSII中問題
- 可以開發(fā)一些簡(jiǎn)便的小工具,工具專欄,或者可以下載的EEWORLD助手什么的
- ADS8332不可以自動(dòng)觸發(fā)?
- 最新嵌入式開發(fā)
- 【轉(zhuǎn)】是德示波器被破解的討論
- 電腦控制mpc014四軸外置運(yùn)動(dòng)控制卡例程
- 【視頻】Altera SoC Live Demo -- VxWorks by WindRiver
- 端午節(jié)相約一起免費(fèi)學(xué)習(xí)單片機(jī)ARM技術(shù)!
- RFP下載問題







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)