大綱:

串口角色:1.數據傳輸。2.充當控制臺。
數據傳輸:兩個嵌入式設備,除了使用usb和網絡來實現數據的傳輸外,就是可以使用串口來實現數據傳輸。
控制臺:在pc機里,我們使用鍵盤來輸入命令和信息等,通過顯示器來顯示查詢的結果或者信息等。在嵌入式里,是通過終端控制臺來輸入命令來控制開發板和顯示返回結果的。前面燒寫的uboot和kernel等就是實例。
串口通訊參數:
首先了解一下波特率:
在這里我們使用115200.

各個位段的含義:
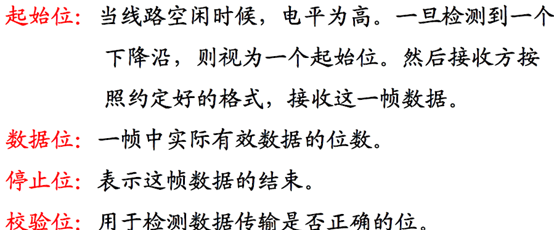
上面這些位參數的設置,對應發送方和接受方的參數必須一致,例如前面uboot的知識里,我們需要通過終端來操作開發板里的uboot。我們在終端軟件里設置的波特率是115200,在uboot里設置的波特率也必須是115200,才能實現正常通訊,要不然顯示的都是亂碼。
最后就是看看串口的物理幀充當的角色:

上一篇:12.2440串口驅動程序設計
下一篇:9.NandFlash的驅動_讀操作2440
推薦閱讀最新更新時間:2025-04-24 18:00
汽車行駛記錄儀的數據傳輸接口電路設計
USB數據傳輸接口電路設計
USB接口有數據傳輸速度快、連接簡單、兼容性好等特點。汽車行駛記錄儀國家標準考慮到RS232接口使用的普及性和USB接口的先進性,規定了同時使用這兩種接口實現數據通信。在USB數據傳輸的設計方案中采用PDIUSBD12芯片作為USB控制器。PDIUSBD12完全符合USB1.1版規范;同時它還符合大多數器件的分類規格;還適用于許多外設,如打印機、掃描儀、外部的存儲設備和數碼相機等,它使得當前使用SCSI的系統可以立即降低成本。
單片機直接讀寫閃存盤,可以實現便攜設備或者嵌入式系統的外掛式海量存儲。這一技術的核心是USB-HOST技術,FAT文件系統規范的實現,海量存儲協議的實現以及U
[嵌入式]
S3C2440串口通信基本功能的代碼
功能:將通過串口接收到的內容再發送出去,在PC機上看到的現象就是在串口通信軟件中輸入什么就會實時地顯示什么。 主文件:serial.c 1 //最常用的寄存器是ULCON、UCON、UBRDIV、UTRSTAT、UTXH、URXH這六個寄存器 2 #define ULCON0 (*(volatile unsigned *)0X50000000) //UART線控制寄存器 3 #define UCON0 (*(volatile unsigned *)0X50000004) //UART控制寄存器 4 #define UFCON0 (*(volatile unsigned *
[單片機]
STM32串口接收不定長數據:采用標志位(比如0X0D,0X0A)結束法
缺點:有些情況下會導致數據丟失(可能返回數據中0x0d、0a本身為有效數據) 適用:約定協議的數據幀(發送數據的設備必須以相應的約定字節作為一次數據結束) void USART1_IRQHandler(void) //串口中斷服務程序(函數) { u8 Res; //定義Res,用于Res =USART_ReceiveData(USART1);中存儲串口1發送的數據(這里的數據按位發送) #if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS為真,則需要支持OS OSIntEnter(); #endif if(USART_GetITStatus(USART1, US
[單片機]
STM32G431之串口詳解

1.串口簡介 通用同步異步 收發器 (USART)提供了一種靈活的方法與使用 工業 標準NRZ異步串行數據格式的外部設備之間進行全雙工數據交換。 USART利用分數波特率發生器提供寬范圍的波特率選擇。它支持同步單向 通信 和半雙工單線通信,也支持LIN(局部互連網), 智能 卡協議和IrDA( 紅外 數據組織)SIR ENDEC規范,以及調制解調器(CTS/RTS)操作。它還允許多 處理器 通信。使用多緩沖器配置的 DMA 方式,可以實現高速數據通信。 任何USART雙向通信至少需要兩個腳:接收數據輸入(RX)和發送數據輸出(TX)。 RX:接收數據串行輸。通過過采樣技術來區別數據和噪音,從而恢復數據。 TX:發送數據輸出。當
[單片機]
STM32的USB虛擬串口介紹
通常我們使用STM32進行串口通信會選擇其硬件串口,但在某些情況下串口會不夠用,這個時候就可以選擇USB的虛擬串口,這樣可以增加一個串口。 USB是非常復雜的一個設備,要想完全搞懂它需要花費不少時間和精力。但去使用它卻相對簡單。這里我們使用STM32CubeMX構建一個初始工程,然后實現將我們從電腦發下來的東西原封不動地發回電腦,使用的芯片是STM32F103zet6。 USB需要配置兩個地方,一個是Connectivity下勾選USB,在Mode下勾選Device,下面的參數保持默認即可。其他芯片類型的選項可能不同,選擇有Device字樣的就OK。 第二在Middleware下選擇USB_DEVICE,在右邊的下拉菜
[單片機]
STM32串口3使用代碼
STM32的串口是相當豐富的,功能也很強勁。最多可提供5路串口(MiniSTM32使用的是STM32F103RBT6,具有3個串口),有分數波特率發生器、支持單線光通信和半雙工單線通訊、支持LIN、智能卡協議和IrDASIR ENDEC規范(僅串口3支持)、具有DMA等。 串口最基本的設置,就是波特率的設置。STM32的串口使用起來還是蠻簡單的,只要你開啟了串口時鐘,并設置相應IO口的模式,然后配置一下波特率,數據位長度,奇偶校驗位等信息,就可以使用了。 串口能給我們編程調試帶來很大幫助,STM32的串口使用起來也很簡單,參考官方代碼,然后對照STM32手冊,就能找到相關寄存器設置,以及設置的先后順序。
[單片機]
如何用示波器測量串口波特率
如何確定時基 假如要測量的波特率為9600, 則每一比特位的時間為:1/9600 ≈ 104 μs,一般示波器橫向上每個大格子里5個小格子,要想看清一比特位一般需要一個小格子就夠了,則時基為:104 μs * 5 = 520 μs, 也就是說時基要500 μs。 注意:測量時選擇的耦合方式為直流,邊沿類型為下降沿,所測串口的電平為TTL 電平,該電平的串口在不傳輸數據時電平為高,靠拉低判斷起始位。 下圖是測9600波特率,所發數據為0x55: 0x55_9600_.PNG 所用示波器為 漢泰的 IDSO1070。從光標測量可以看出AB之間的時間為107.422 μs,和計算的104 μs 差不多。 下圖為波特率9600,所發數
[測試測量]
基于Linux-2.6.32.2在mini2440驅動分析一:串口驅動
串口驅動文件位于: linux-2.6.32.2/drivers/serial/s3c2440.c,省去非重點部分分析。 #include linux/module.h #include linux/ioport.h #include linux/io.h #include linux/platform_device.h #include linux/init.h #include linux/serial_core.h #include linux/serial.h #include asm/irq.h #include mach/hardware.h #include plat/regs-serial
[單片機]
 英飛凌XC167單片機串口通訊控制LED程序
英飛凌XC167單片機串口通訊控制LED程序 《農村有線廣播》1971版(添加封面、版權頁)
《農村有線廣播》1971版(添加封面、版權頁) 操作系統真相還原
操作系統真相還原
小廣播
熱門活動
換一批
更多
設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析

最新單片機文章

更多開源項目推薦
- AM3G-1215SZ 15V 3 瓦 DC-DC 轉換器的典型應用
- NCP300LSN45T1 4.5V LED 條形圖電壓監視器的典型應用
- 【南京郵電校賽】 ir2104降壓電路
- LTC3808EDE,具有擴頻頻率調制的同步轉換器
- 將 12V 轉換為 1.2V(負載電流大于 6A)的三種不同降壓轉換器電路參考設計
- 使用 LTC3637MPDHC 4V 至 76V 輸入至 1.8V 超級電容充電器的典型應用
- AD8273-EVALZ,用于評估 AD8273 差動放大器的評估板
- AD8369-EVAL,用于 AD8369ARU 數字控制 VGA LF 至 600 MHz 的評估板
- LTC1147-3.3、3.3V 低壓差高效穩壓器的典型應用電路
- 黃淮學院立創杯電子設計大賽-1001990A-陳學智






更多熱門文章
更多每日新聞
- 特斯拉:美國交付的Model Y/3電池包已實現100%美國生產
- 地平線與博世深化合作,攜手為多家車企提供輔助駕駛產品
- 強化中國市場戰略布局,德州儀器正靈活應對全球關稅挑戰
- Molex莫仕通過本地合作和創新加強支持中國汽車行業
- 貿澤開售Texas Instruments適用于高分辨率AR HUD的 全新DLP4620S-Q1 0.46"汽車數字微鏡器件
- ROHM推出高功率密度的新型SiC模塊,將實現車載充電器小型化!
- 用上車規級UFS 4.0,讓出行變得高效且可靠
- 車載測試技術解析:聚焦高帶寬、多通道同步采集與協議分析
- 傳統晶體管的極限!臺積電3nm N3P已量產
- 分析師稱H20出口管制毫無意義:對中國AI發展影響不大
更多往期活動
04月24日歷史上的今天
廠商技術中心







 京公網安備 11010802033920號
京公網安備 11010802033920號