CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network)的簡稱,它是由研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國BOSCH公司開發(fā)的,并最終成為國際標(biāo)準(zhǔn)(ISO11519),是國際上應(yīng)用最廣泛的現(xiàn)場總線之一。
CAN總線協(xié)議已經(jīng)成為汽車計算機控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機械車輛設(shè)計的J1939協(xié)議。近年來,它具有的高可靠性和良好的錯誤檢測能力受到重視,被廣泛應(yīng)用于汽車計算機控制系統(tǒng)和環(huán)境溫度惡劣、電磁輻射強及振動大的工業(yè)環(huán)境。
15.1.CAN 基礎(chǔ)知識
CAN 物理層
與I2C、SPI等具有時鐘信號的同步通訊方式不同,CAN通訊并不是以時鐘信號來進行同步的,它是一種異步通訊,只具有CAN_High和CAN_Low兩條信號線,共同構(gòu)成一組差分信號線,以差分信號的形式進行通訊。
閉環(huán)總線網(wǎng)絡(luò)
CAN物理層的形式主要有兩種,如下圖所示CAN閉環(huán)總線通訊網(wǎng)絡(luò)是一種遵循ISO11898標(biāo)準(zhǔn)的高速、短距離“閉環(huán)網(wǎng)絡(luò)”,它的總線最大長度為40m,通信速度最高為1Mbps,總線的兩端各要求有一個“120歐”的電阻。

開環(huán)總線網(wǎng)絡(luò)
如下圖所示CAN開環(huán)總線通訊網(wǎng)絡(luò)是一種遵循ISO11519-2標(biāo)準(zhǔn)的低速、遠(yuǎn)距離“開環(huán)網(wǎng)絡(luò)”,它的最大傳輸距離為1km,最高通訊速率為125kbps,兩根總線是獨立的、不形成閉環(huán),要求每根總線上各串聯(lián)有一個“2.2千歐”的電阻。
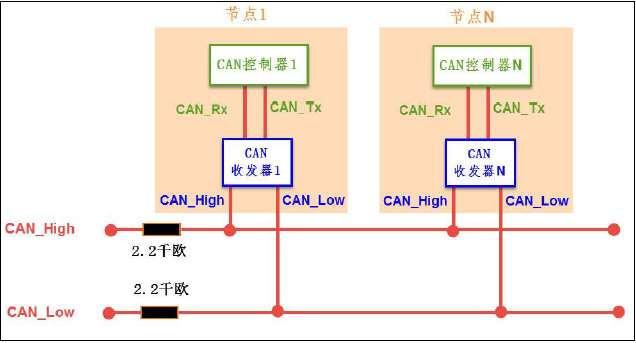
通訊節(jié)點
從CAN通訊網(wǎng)絡(luò)圖可了解到,CAN總線上可以掛載多個通訊節(jié)點,節(jié)點之間的信號經(jīng)過總線傳輸,實現(xiàn)節(jié)點間通訊。由于CAN通訊協(xié)議不對節(jié)點進行地址編碼,而是對數(shù)據(jù)內(nèi)容進行編碼的,所以網(wǎng)絡(luò)中的節(jié)點個數(shù)理論上不受限制,只要總線的負(fù)載足夠即可,可以通過中繼器增強負(fù)載。
CAN通訊節(jié)點由一個CAN控制器及CAN收發(fā)器組成,控制器與收發(fā)器之間通過CAN_Tx及CAN_Rx信號線相連,收發(fā)器與CAN總線之間使用CAN_High及CAN_Low信號線相連。其中CAN_Tx及CAN_Rx使用普通的類似TTL邏輯信號,而CAN_High及CAN_Low是一對差分信號線,使用比較特別的差分信號,下一小節(jié)再詳細(xì)說明。
當(dāng)CAN節(jié)點需要發(fā)送數(shù)據(jù)時,控制器把要發(fā)送的二進制編碼通過CAN_Tx線發(fā)送到收發(fā)器,然后由收發(fā)器把這個普通的邏輯電平信號轉(zhuǎn)化成差分信號,通過差分線CAN_High和CAN_Low線輸出到CAN總線網(wǎng)絡(luò)。而通過收發(fā)器接收總線上的數(shù)據(jù)到控制器時,則是相反的過程,收發(fā)器把總線上收到的CAN_High及CAN_Low信號轉(zhuǎn)化成普通的邏輯電平信號,通過CAN_Rx輸出到控制器中。
例如,GD32的CAN片上外設(shè)就是通訊節(jié)點中的控制器,為了構(gòu)成完整的節(jié)點,還要給它外接一個收發(fā)器,在GD32E103V-EVAL V1.0開發(fā)板上使用型號為SN65HVD230的芯片作為CAN收發(fā)器。
CAN控制器與CAN收發(fā)器的關(guān)系如同TTL串口與MAX3232電平轉(zhuǎn)換芯片的關(guān)系,MAX3232芯片把TTL電平的串口信號轉(zhuǎn)換成RS-232電平的串口信號,CAN收發(fā)器的作用則是把CAN控制器的TTL電平信號轉(zhuǎn)換成差分信號(或者相反)。
差分信號
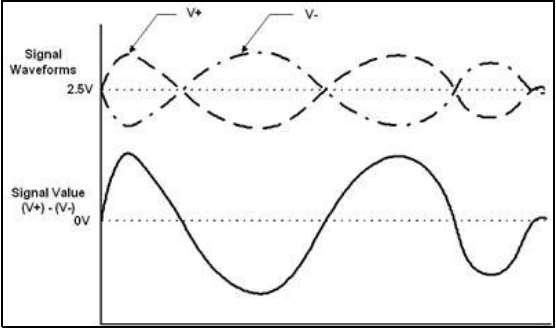
差分信號又稱差模信號,與傳統(tǒng)使用單根信號線電壓表示邏輯的方式有區(qū)別,使用差分信號傳輸時,需要兩根信號線,這兩個信號線的振幅相等,相位相反,通過兩根信號線的電壓差值來表示 邏輯0和邏輯1。如下圖所示差分信號使用了V+與V-信號的差值表達(dá)出了圖下方的信號。
相對于單信號線傳輸?shù)姆绞剑褂貌罘中盘杺鬏斁哂腥缦聝?yōu)點:
抗干擾能力強,當(dāng)外界存在噪聲干擾時,幾乎會同時耦合到兩條信號線上,而接收端只關(guān)心兩個信號的差值,所以外界的共模噪聲可以被完全抵消。
能有效抑制它對外部的電磁干擾,同樣的道理,由于兩根信號的極性相反,他們對外輻射的電磁場可以相互抵消,耦合的越緊密,泄放到外界的電磁能量越少。
時序定位精確,由于差分信號的開關(guān)變化是位于兩個信號的交點,而不像普通單端信號依靠高低兩個閾值電壓判斷,因而受工藝,溫度的影響小,能降低時序上的誤差,同時也更適合于低幅度信號的電路。
由于差分信號線具有這些優(yōu)點,所以在USB協(xié)議、485協(xié)議、以太網(wǎng)協(xié)議及CAN協(xié)議的物理層中,都使用了差分信號傳輸。
CAN 協(xié)議中的差分信號
CAN協(xié)議中對它使用的CAN_High及CAN_Low表示的差分信號做了規(guī)定,見下表CAN協(xié)議標(biāo)準(zhǔn)表示的信號邏輯及下圖CAN差分信號(高速)所示。以高速CAN協(xié)議為例,當(dāng)表示邏輯1時(隱性電平),CAN_High和CAN_Low線上的電壓均為2.5v,即它們的電壓差VH-VL=0V;而表示邏輯0時(顯性電平),CAN_High的電平為3.5V,CAN_Low線的電平為1.5V,即它們的電壓差為VHVL=2V。例如,當(dāng)CAN收發(fā)器從CAN_Tx線接收到來自CAN控制器的低電平信號時(邏輯0),它會使CAN_High輸出3.5V,同時CAN_Low輸出1.5V,從而輸出顯性電平表示邏輯0。
CAN協(xié)議標(biāo)準(zhǔn)表示的信號邏輯
輸入鏈接說明
CAN 差分信號(高速)

在 CAN 總線中,必須使它處于隱性電平(邏輯 1)或顯性電平(邏輯 0)中的其中一個狀態(tài)。假如有兩個 CAN 通訊節(jié)點,在同一時間,一個輸出隱性電平,另一個輸出顯性電平,類似 I2C 總線的“線 與”特性將使它處于顯性電平狀態(tài),顯性電平的名字就是這樣來的,即可以認(rèn)為顯性具有優(yōu)先的意味。
由于 CAN 總線協(xié)議的物理層只有 1 對差分線,在一個時刻只能表示一個信號,所以對通訊節(jié)點來說,CAN 通訊是半雙工的,收發(fā)數(shù)據(jù)需要分時進行。在 CAN 的通訊網(wǎng)絡(luò)中,因為共用總線,在整個網(wǎng)絡(luò)中同一時刻只能有一個通訊節(jié)點發(fā)送信號,其余的節(jié)點在該時刻都只能接收。
CAN 協(xié)議層
以上是 CAN 的物理層標(biāo)準(zhǔn),約定了電氣特性,以下介紹的協(xié)議層則規(guī)定了通訊邏輯。
CAN 的波特率及位同步
由于CAN屬于異步通訊,沒有時鐘信號線,連接在同一個總線網(wǎng)絡(luò)中的各個節(jié)點會像串口異步通訊那樣,節(jié)點間使用約定好的波特率進行通訊,特別地,CAN還會使用“位同步”的方式來抗干擾、吸收誤差,實現(xiàn)對總線電平信號進行正確的采樣,確保通訊正常。
位時序分解
為了實現(xiàn)位同步,CAN 協(xié)議把每一個數(shù)據(jù)位的時序分解成如下圖 CAN 位時序分解圖所示的 SS段、PTS 段、PBS1 段、PBS2 段,這四段的長度加起來即為一個 CAN 數(shù)據(jù)位的長度。分解后最小的時間單位是 Tq,而一個完整的位由 8~25 個 Tq 組成。為方便表示,CAN 位時序分解圖中的高低電平直接代表信號邏輯 0 或邏輯 1(不是差分信號)。
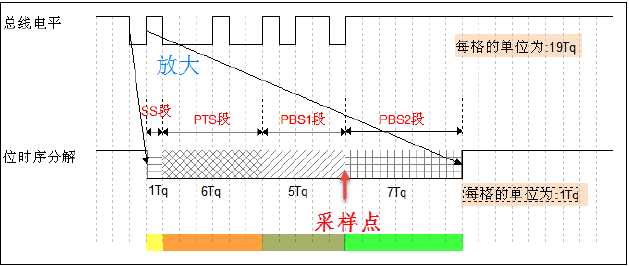
該圖中表示的 CAN 通訊信號每一個數(shù)據(jù)位的長度為 19Tq,其中 SS 段占 1Tq,PTS 段占 6Tq,PBS1 段占 5Tq,PBS2 段占 7Tq。信號的采樣點位于 PBS1 段與 PBS2 段之間,通過控制各段的長度,可以對采樣點的位置進行偏移,以便準(zhǔn)確地采樣。
各段的作用介紹如下:
SS段(SYNC SEG)
SS 譯為同步段,若通訊節(jié)點檢測到總線上信號的跳變沿被包含在 SS 段的范圍之內(nèi),則表示節(jié)點與總線的時序是同步的,當(dāng)節(jié)點與總線同步時,采樣點采集到的總線電平即可被確定為該位的電 平。SS 段的大小固定為 1Tq。
PTS段(PROP SEG)
PTS 譯為傳播時間段,這個時間段是用于補償網(wǎng)絡(luò)的物理延時時間。是總線上輸入比較器延時和輸出驅(qū)動器延時總和的兩倍。PTS 段的大小可以為 1~8Tq。
PBS1段(PHASE SEG1)
PBS1 譯為相位緩沖段,主要用來補償邊沿階段的誤差,它的時間長度在重新同步的時候可以加長。PBS1 段的初始大小可以為 1~8Tq。
PBS2段(PHASE SEG2)
PBS2 這是另一個相位緩沖段,也是用來補償邊沿階段誤差的,它的時間長度在重新同步時可以縮短。PBS2 段的初始大小可以為 2~8Tq。
通訊的波特率
總線上的各個通訊節(jié)點只要約定好1個Tq的時間長度以及每一個數(shù)據(jù)位占據(jù)多少個Tq,就可以確定CAN通訊的波特率。
例如,假設(shè)圖5-53中的1Tq=1us,而每個數(shù)據(jù)位由19個Tq組成,則傳輸一位數(shù)據(jù)需要時間T1bit =19us,從而每秒可以傳輸?shù)臄?shù)據(jù)位個數(shù)為:
1x106/19 = 52631.6 (bps)
這個每秒可傳輸?shù)臄?shù)據(jù)位的個數(shù)即為通訊中的波特率。
同步過程分析
波特率只是約定了每個數(shù)據(jù)位的長度,數(shù)據(jù)同步還涉及到相位的細(xì)節(jié),這個時候就需要用到數(shù)據(jù)位內(nèi)的SS、PTS、PBS1及PBS2段了。
根據(jù)對段的應(yīng)用方式差異,CAN 的數(shù)據(jù)同步分為硬同步和重新同步。其中硬同步只是當(dāng)存在“幀起始信號”時起作用,無法確保后續(xù)一連串的位時序都是同步的,而重新同步方式可解決該問題,這 兩種方式具體介紹如下:
(1)硬同步
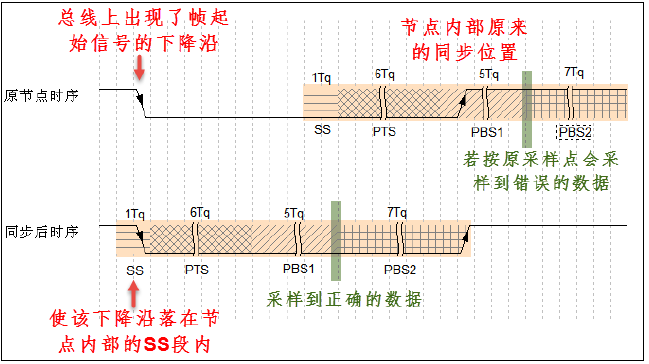
若某個 CAN 節(jié)點通過總線發(fā)送數(shù)據(jù)時,它會發(fā)送一個表示通訊起始的信號(即下一小節(jié)介紹的幀起始信號),該信號是一個由高變低的下降沿。而掛載到 CAN 總線上的通訊節(jié)點在不發(fā)送數(shù)據(jù)時, 會時刻檢測總線上的信號。
下圖硬同步過程圖所示,可以看到當(dāng)總線出現(xiàn)幀起始信號時,某節(jié)點檢測到總線的幀起始信號不在節(jié)點內(nèi)部時序的 SS 段范圍,所以判斷它自己的內(nèi)部時序與總線不同步,因而這個狀態(tài)的采樣點采集得的數(shù)據(jù)是不正確的。所以節(jié)點以硬同步的方式調(diào)整,把自己的位時序中的 SS 段平移至總線出現(xiàn)下降沿的部分,獲得同步,同步后采樣點就可以采集得正確數(shù)據(jù)了。
(2)重新同步
前面的硬同步只是當(dāng)存在幀起始信號時才起作用,如果在一幀很長的數(shù)據(jù)內(nèi),節(jié)點信號與總線信號相位有偏移時,這種同步方式就無能為力了。因而需要引入重新同步方式,它利用普通數(shù)據(jù)位的高至低電平的跳變沿來同步(幀起始信號是特殊的跳變沿)。重新同步與硬同步方式相似的地方是它們都使用 SS 段來進行檢測,同步的目的都是使節(jié)點內(nèi)的 SS 段把跳變沿包含起來。
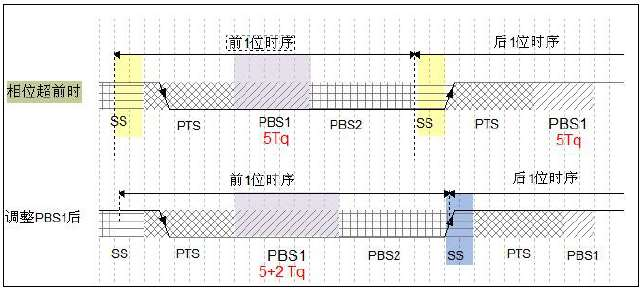
重新同步的方式分為超前和滯后兩種情況,以總線跳變沿與 SS 段的相對位置進行區(qū)分。第一種相位超前的情況如下圖所示,相位超前時的重新同步,節(jié)點從總線的邊沿跳變中,檢測到它內(nèi)部的時序比總線的時序相對超前2Tq,這時控制器在下一個位時序中的PBS1段增加2Tq的時間長度,使得節(jié)點與總線時序重新同步。
相位超前時的重新同步
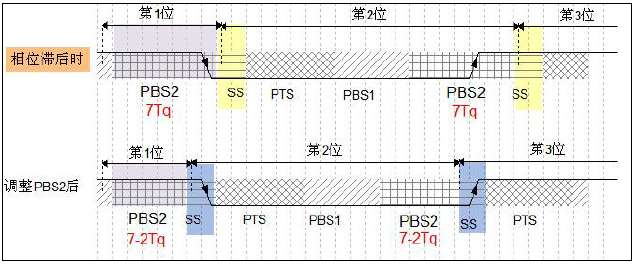
第二種相位滯后的情況如下圖所示,相位滯后時的重新同步,節(jié)點從總線的邊沿跳變中,檢測到它的時序比總線的時序相對滯后2Tq,這時控制器在前一個位時序中的 PBS2 段減少 2Tq 的時間長 度,獲得同步。
相位滯后時的重新同步
在重新同步的時候,PBS1 和 PBS2 中增加或減少的這段時間長度被定義為“重新同步補償寬度SJW (reSynchronization Jump Width)”。一般來說 CAN 控制器會限定 SJW 的最大值,如限定了 最大 SJW=3Tq 時,單次同步調(diào)整的時候不能增加或減少超過 3Tq 的時間長度,若有需要,控制器會通過多次小幅度調(diào)整來實現(xiàn)同步。當(dāng)控制器設(shè)置的 SJW 極限值較大時,可以吸收的誤差加大,但通訊的速度會下降。
CAN 的報文種類及結(jié)構(gòu)
在 SPI 通訊中,片選、時鐘信號、數(shù)據(jù)輸入及數(shù)據(jù)輸出這 4 個信號都有單獨的信號線,I2C 協(xié)議包含有時鐘信號及數(shù)據(jù)信號 2 條信號線,異步串口包含接收與發(fā)送 2 條信號線,這些協(xié)議包含的 信號都比 CAN 協(xié)議要豐富,它們能輕易進行數(shù)據(jù)同步或區(qū)分?jǐn)?shù)據(jù)傳輸方向。而 CAN 使用的是兩條差分信號線,只能表達(dá)一個信號,簡潔的物理層決定了 CAN 必然要配上一套更復(fù)雜的協(xié)議,如 何用一個信號通道實現(xiàn)同樣、甚至更強大的功能呢?CAN 協(xié)議給出的解決方案是對數(shù)據(jù)、操作命令(如讀/寫)以及同步信號進行打包,打包后的這些內(nèi)容稱為報文。
在原始數(shù)據(jù)段的前面加上傳輸起始標(biāo)簽、片選(識別)標(biāo)簽和控制標(biāo)簽,在數(shù)據(jù)的尾段加上 CRC 校驗標(biāo)簽、應(yīng)答標(biāo)簽和傳輸結(jié)束標(biāo)簽,把這些內(nèi)容按特定的格式打包好,就可以用一個通道表達(dá)各種信號了,各種各樣的標(biāo)簽就如同 SPI 中各種通道上的信號,起到了協(xié)同傳輸?shù)淖饔谩.?dāng)整個數(shù)據(jù)包被傳輸?shù)狡渌O(shè)備時,只要這些設(shè)備按格式去解讀,就能還原出原始數(shù)據(jù),這樣的報文就被稱為 CAN 的“數(shù)據(jù)幀”。
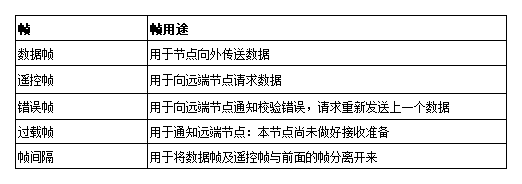
為了更有效地控制通訊,CAN 一共規(guī)定了 5 種類型的幀,它們的類型及用途說明如下表幀的種類及其用途所示。
數(shù)據(jù)幀的結(jié)構(gòu)
數(shù)據(jù)幀是在 CAN 通訊中最主要、最復(fù)雜的報文,我們來了解它的結(jié)構(gòu),如下圖數(shù)據(jù)幀的結(jié)構(gòu)所示。
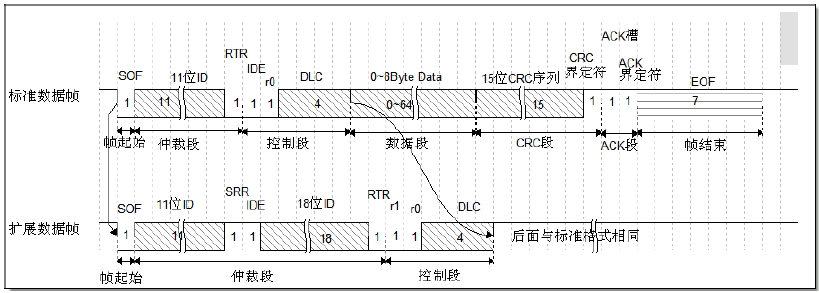
數(shù)據(jù)幀以一個顯性位(邏輯 0)開始,以 7 個連續(xù)的隱性位(邏輯 1)結(jié)束,在它們之間,分別有仲裁段、控制段、數(shù)據(jù)段、CRC 段和 ACK 段。
幀起始
SOF 段(Start Of Frame),譯為幀起始,幀起始信號只有一個數(shù)據(jù)位,是一個顯性電平,它用于通知各個節(jié)點將有數(shù)據(jù)傳輸,其它節(jié)點通過幀起始信號的電平跳變沿來進行硬同步。
仲裁段
當(dāng)同時有兩個報文被發(fā)送時,總線會根據(jù)仲裁段的內(nèi)容決定哪個數(shù)據(jù)包能被傳輸,這也是它名稱的由來。
仲裁段的內(nèi)容主要為本數(shù)據(jù)幀的 ID 信息(標(biāo)識符),數(shù)據(jù)幀具有標(biāo)準(zhǔn)格式和擴展格式兩種,區(qū)別就在于 ID 信息的長度,標(biāo)準(zhǔn)格式的 ID 為 11 位,擴展格式的 ID 為 29 位,它在標(biāo)準(zhǔn) ID 的基礎(chǔ)上多 出 18 位。在 CAN 協(xié)議中,ID 起著重要的作用,它決定著數(shù)據(jù)幀發(fā)送的優(yōu)先級,也決定著其它節(jié)點是否會接收這個數(shù)據(jù)幀。CAN 協(xié)議不對掛載在它之上的節(jié)點分配優(yōu)先級和地址,對總線的占有權(quán)是由信息的重要性決定的,即對于重要的信息,我們會給它打包上一個優(yōu)先級高的 ID,使它能夠及時地發(fā)送出去。也正因為它這樣的優(yōu)先級分配原則,使得 CAN 的擴展性大大加強,在總線上增加或減少節(jié)點并不影響其它設(shè)備。
報文的優(yōu)先級,是通過對 ID 的仲裁來確定的。根據(jù)前面對物理層的分析我們知道如果總線上同時出現(xiàn)顯性電平和隱性電平,總線的狀態(tài)會被置為顯性電平,CAN 正是利用這個特性進行仲裁。
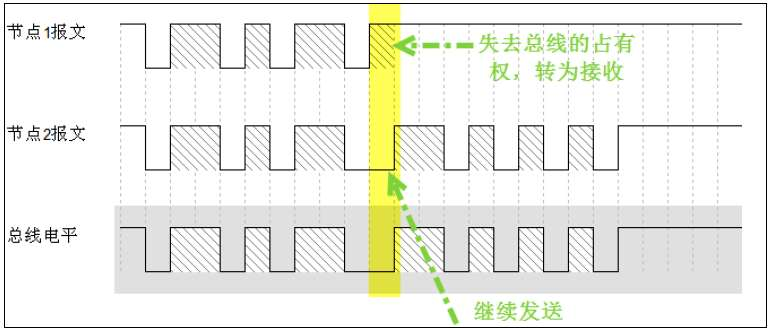
若兩個節(jié)點同時競爭CAN總線的占有權(quán),當(dāng)它們發(fā)送報文時,若首先出現(xiàn)隱性電平,則會失去對總線的占有權(quán),進入接收狀態(tài)。如下圖過程所示,在開始階段,兩個設(shè)備發(fā)送的電平一樣,所以它們一直繼續(xù)發(fā)送數(shù)據(jù)。到了圖中箭頭所指的時序處,節(jié)點單元1發(fā)送的為隱性電平,而此時節(jié)點單元2發(fā)送的為顯性電平,由于總線的“線與”特性使它表達(dá)出顯示電平,因此單元2競爭總線成功,這個報文得以被繼續(xù)發(fā)送出去。
仲裁段 ID 的優(yōu)先級也影響著接收設(shè)備對報文的反應(yīng)。因為在 CAN 總線上數(shù)據(jù)是以廣播的形式發(fā)送的,所有連接在 CAN 總線的節(jié)點都會收到所有其它節(jié)點發(fā)出的有效數(shù)據(jù),因而我們的 CAN 控制器大多具有根據(jù) ID 過濾報文的功能,它可以控制自己只接收某些 ID 的報文。
回看數(shù)據(jù)幀的結(jié)構(gòu)圖中的數(shù)據(jù)幀格式,可看到仲裁段除了報文 ID 外,還有 RTR、IDE 和SRR 位。
(1) RTR 位(Remote Transmission Request Bit),譯作遠(yuǎn)程傳輸請求位,它是用于區(qū)分?jǐn)?shù)據(jù)幀和遙控幀的,當(dāng)它為顯性電平時表示數(shù)據(jù)幀,隱性電平時表示遙控幀。
(2) IDE 位(Identifier Extension Bit),譯作標(biāo)識符擴展位,它是用于區(qū)分標(biāo)準(zhǔn)格式與擴展格式,當(dāng)它為顯性電平時表示標(biāo)準(zhǔn)格式,隱性電平時表示擴展格式。
(3) SRR 位(Substitute Remote Request Bit),只存在于擴展格式,它用于替代標(biāo)準(zhǔn)格式中的 RTR位。由于擴展幀中的 SRR 位為隱性位,RTR 在數(shù)據(jù)幀為顯性位,所以在兩個 ID 相同的標(biāo)準(zhǔn)格式 報文與擴展格式報文中,標(biāo)準(zhǔn)格式的優(yōu)先級較高。
控制段
在控制段中的 r1 和 r0 為保留位,默認(rèn)設(shè)置為顯性位。它最主要的是 DLC 段(Data Length Code),譯為數(shù)據(jù)長度碼,它由 4 個數(shù)據(jù)位組成,用于表示本報文中的數(shù)據(jù)段含有多少個字節(jié),DLC 段表 示的數(shù)字為 0~8。
數(shù)據(jù)段
數(shù)據(jù)段為數(shù)據(jù)幀的核心內(nèi)容,它是節(jié)點要發(fā)送的原始信息,由 0~8 個字節(jié)組成,MSB 先行。
CRC 段
為了保證報文的正確傳輸,CAN 的報文包含了一段 15 位的 CRC 校驗碼,一旦接收節(jié)點算出的CRC 碼跟接收到的 CRC 碼不同,則它會向發(fā)送節(jié)點反饋出錯信息,利用錯誤幀請求它重新發(fā)送。CRC 部分的計算一般由 CAN 控制器硬件完成,出錯時的處理則由軟件控制最大重發(fā)數(shù)。
在 CRC 校驗碼之后,有一個 CRC 界定符,它為隱性位,主要作用是把 CRC 校驗碼與后面的 ACK 段間隔起來。
ACK 段
ACK 段包括一個 ACK 槽位,和 ACK 界定符位。類似 I2C 總線,在 ACK 槽位中,發(fā)送節(jié)點發(fā)送的是隱性位,而接收節(jié)點則在這一位中發(fā)送顯性位以示應(yīng)答。在 ACK 槽和幀結(jié)束之間由 ACK 界定符間隔開。
幀結(jié)束
EOF 段(End Of Frame),譯為幀結(jié)束,幀結(jié)束段由發(fā)送節(jié)點發(fā)送的 7 個隱性位表示結(jié)束。
其它報文的結(jié)構(gòu)
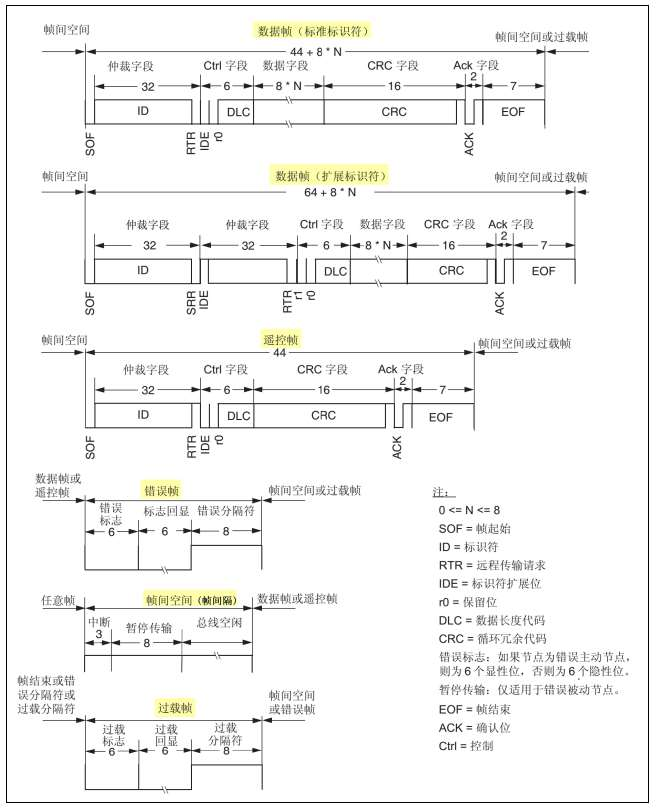
關(guān)于其它的 CAN 報文結(jié)構(gòu),不再展開講解,其主要內(nèi)容見下圖 各種 CAN 報文的結(jié)構(gòu)。
15.2.GD32 CAN 外設(shè)原理簡介
因篇幅有限,本文無法詳細(xì)介紹GD32所有系列CAN外設(shè)接口,下面以GD32E103為例,著重介紹下GD32E103的CAN外設(shè)簡介和結(jié)構(gòu)框圖,后介紹下各個系列的差異。
GD32 CAN 主要特性
? 支持CAN總線協(xié)議2.0A和2.0B;
? 支持CAN-FD幀(ISO11898-1和CAN-FD規(guī)范V1.0);
? 常規(guī)幀:通信波特率最大為1Mbit/s;
? CAN-FD幀:通信最大波特率為6Mbit/s;
? 支持傳輸延遲補償;
? 支持時間觸發(fā)通信(Time-triggered communication);
? 中斷使能和清除;
發(fā)送功能
? 3個發(fā)送郵箱;
? 支持發(fā)送優(yōu)先級;
? 支持發(fā)送時間戳。
接收功能
? 2個深度為3的接收FIFO;
? 具有28個標(biāo)識符過濾器;
? FIFO鎖定功能。
時間觸發(fā)通信
? 在時間觸發(fā)通信模式下禁用自動重傳;
? 16位定時器;
? 接收時間戳;
? 發(fā)送時間戳。
CAN 結(jié)構(gòu)框圖介紹
CAN 模塊結(jié)構(gòu)框圖
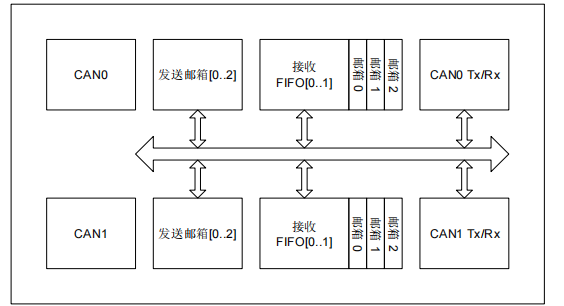
GD32E103一共有兩個CAN控制器,分別為CAN0和CAN1。每個CAN控制器有3個發(fā)送郵箱,2個深度為3的接收FIFO。
CAN控制器包含多個寄存器,下面主要講解其中的控制寄存CAN_CTL和位時序寄存器CAN_BT。
控制寄存器 CAN_CTL
控制寄存器CAN_CTL負(fù)責(zé)管理CAN的工作模式,它使用以下寄存器位實現(xiàn)控制。
(1) DFZ調(diào)試凍結(jié)功能
DFZ(Debug freeze)調(diào)試凍結(jié),使用它可設(shè)置CAN處于工作狀態(tài)或禁止收發(fā)的狀態(tài),禁止收發(fā)時仍可訪問接收FIFO中的數(shù)據(jù)。這兩種狀態(tài)是當(dāng)STM32芯片處于程序調(diào)試模式時才使用的,平時使用 并不影響。
(2) TTC時間觸發(fā)通信
TTC(Time triggered communication)時間觸發(fā)通信,它用于配置CAN的時間觸發(fā)通信模式,在此模式下,CAN使用它內(nèi)部定時器產(chǎn)生時間戳,并把它保存在CAN_TMxP、CAN_RFIFOMPx寄存器中。內(nèi)部定時器在每個CAN位時間累加,在接收和發(fā)送的幀起始位被采樣,并生成時間戳。利用它可以實現(xiàn)ISO 11898-4 CAN標(biāo)準(zhǔn)的分時同步通信功能。
(3) ABOR自動離線恢復(fù)
ABOR(Automatic bus-off recovery) 自動離線恢復(fù),它用于設(shè)置是否使用自動離線管理功能。當(dāng)節(jié)點檢測到它發(fā)送錯誤或接收錯誤超過一定值時,會自動進入離線狀態(tài),在離線狀態(tài)中,CAN不能接收或發(fā)送報文。處于離線狀態(tài)的時候,可以軟件控制恢復(fù)或者直接使用這個自動離線管理功能,它會在適當(dāng)?shù)臅r候自動恢復(fù)。
(4) AWU自動喚醒
AWU(Automatic wakeup),自動喚醒功能,CAN外設(shè)可以使用軟件進入低功耗的睡眠模式,如果使能了這個自動喚醒功能,當(dāng)CAN檢測到總線活動的時候,會自動喚醒。
(5) AR自動重傳
AR(Automatic retransmission)報文自動重傳功能,設(shè)置這個功能后,當(dāng)報文發(fā)送失敗時會自動重傳至成功為止。若不使用這個功能,無論發(fā)送結(jié)果如何,消息只發(fā)送一次。
(6) RFO接收FIFO覆蓋
RFO (Receive FIFO overwrite)接收FIFO覆蓋,該功能用于鎖定接收FIFO。鎖定后,當(dāng)接收FIFO溢出時,會丟棄下一個接收的報文。若不鎖定,則下一個接收到的報文會覆蓋原報文。
(7) TFO發(fā)送FIFO順序
FTO(Tx FIFO order)報文發(fā)送順序的判定方法,當(dāng)CAN外設(shè)的發(fā)送郵箱中有多個待發(fā)送報文時,本功能可以控制它是根據(jù)報文的ID優(yōu)先級還是報文存進郵箱的順序來發(fā)送。
位時序寄存器(CAN_BT)及波特率
CAN外設(shè)中的位時序寄存器CAN_BT用于配置測試模式、波特率以及各種位內(nèi)的段參數(shù)。
(1) 測試模式
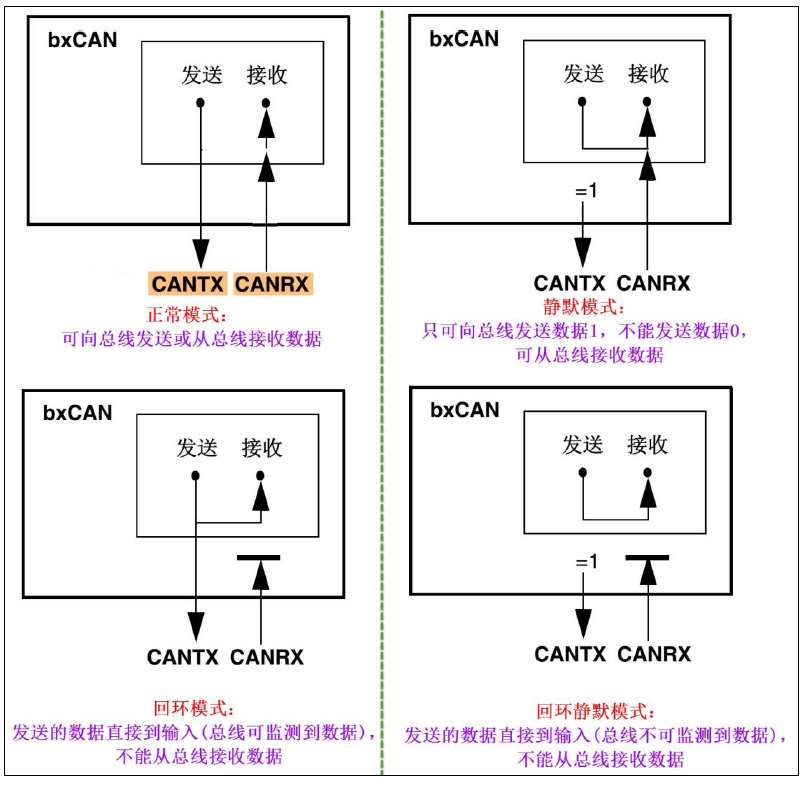
為方便調(diào)試,GD32的CAN提供了測試模式,配置位時序寄存器CAN_BT的SCMOD及LCMOD位可以控制使用正常模式、靜默模式、回環(huán)模式及靜默回環(huán)模式,見下圖四種通訊模式
各個通訊模式介紹如下:
正常模式
正常模式下就是一個正常的CAN節(jié)點,可以向總線發(fā)送數(shù)據(jù)和接收數(shù)據(jù)。
靜默模式
靜默模式下,它自己的輸出端的邏輯0數(shù)據(jù)會直接傳輸?shù)剿约旱妮斎攵耍壿?可以被發(fā)送到總線,所以它不能向總線發(fā)送顯性位(邏輯0),只能發(fā)送隱性位(邏輯1)。輸入端可以從總線接收內(nèi)容。 由于它只可發(fā)送的隱性位不會強制影響總線的狀態(tài),所以把它稱為靜默模式。這種模式一般用于監(jiān)測,它可以用于分析總線上的流量,但又不會因為發(fā)送顯性位而影響總線。
回環(huán)模式
回環(huán)模式下,它自己的輸出端的所有內(nèi)容都直接傳輸?shù)阶约旱妮斎攵耍敵龆说膬?nèi)容同時也會被傳輸?shù)娇偩€上,即也可使用總線監(jiān)測它的發(fā)送內(nèi)容。輸入端只接收自己發(fā)送端的內(nèi)容,不接收來自總線上的內(nèi)容。使用回環(huán)模式可以進行自檢。
回環(huán)靜默模式
回環(huán)靜默模式是以上兩種模式的結(jié)合,自己的輸出端的所有內(nèi)容都直接傳輸?shù)阶约旱妮斎攵耍⑶也粫蚩偩€發(fā)送顯性位影響總線,不能通過總線監(jiān)測它的發(fā)送內(nèi)容。輸入端只接收自己發(fā)送端的內(nèi)容,不接收來自總線上的內(nèi)容。這種方式可以在“熱自檢”時使用,即自我檢查的時候,不會干擾總線。
以上說的各個模式,是不需要修改硬件接線的,如當(dāng)輸出直連輸入時,它是在GD32芯片內(nèi)部連接的,傳輸路徑不經(jīng)過STM32的CAN_Tx/Rx引腳,更不經(jīng)過外部連接的CAN收發(fā)器,只有輸出數(shù)據(jù) 到總線或從總線接收的情況下才會經(jīng)過CAN_Tx/Rx引腳和收發(fā)器。
(2)位時序及波特率
GD32外設(shè)定義的位時序與我們前面解釋的CAN標(biāo)準(zhǔn)時序有一點區(qū)別,見下圖GD32中的位時序。
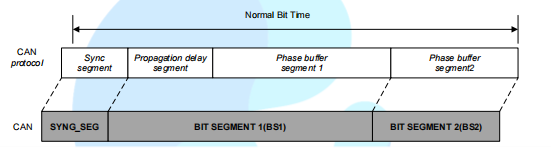
GD32的CAN外設(shè)位時序中只包含3段,分別是同步段SYNC_SEG、位段BS1及位段BS2,采樣點位于BS1及BS2段的交界處。其中SYNC_SEG段固定長度為1Tq,而BS1及BS2段可以在位時序寄存器CAN_BT設(shè)置它們的時間長度,它們可以在重新同步期間增長或縮短,該長度DSJW也可在位時序寄存器中配置。
理解GD32的CAN外設(shè)的位時序時,可以把它的BS1段理解為是由前面介紹的CAN標(biāo)準(zhǔn)協(xié)議中PTS段與PBS1段合在一起的,而BS2段就相當(dāng)于PBS2段。
了解位時序后,我們就可以配置波特率了。通過配置位時序寄存器CAN_BT的BS1[6:0]及BS2[4:0]寄存器位設(shè)定BS1及BS2段的長度后,我們就可以確定每個CAN數(shù)據(jù)位的時間:
BS1段時間: TS1=Tq x (BS1[6:0] + 1)
BS2段時間: TS2= Tq x (BS2[4:0] + 1)
一個數(shù)據(jù)位的時間: T1bit =1Tq+TS1+TS2 =1+ (BS1[6:0] + 1)+ (BS2[4:0] + 1)= N Tq
其中單個時間片的長度Tq與CAN外設(shè)的所掛載的時鐘總線及分頻器配置有關(guān)。
CAN0和CAN1外設(shè)都是掛載在APB1總線上的,而位時序寄存器CAN_BT中的BAUDPSC[9:0]位可以設(shè)置CAN外設(shè)時鐘的分頻值 ,所以:
Tq = (BAUDPSC[9:0]) x TPCLK
其中的PCLK指APB1時鐘,默認(rèn)值為60MHz。
最終可以計算出CAN通訊的波特率:
BaudRate = 1/N Tq
例如下表一種配置波特率為1Mbps的方式說明了如何配置波特率為1Mbps。


上一篇:【GD32 MCU 入門教程】GD32 MCU 常見外設(shè)介紹(1)RCU 時鐘介紹
下一篇:【GD32 MCU 入門教程】GD32 MCU 常見外設(shè)介紹(3)NVIC 介紹
推薦閱讀最新更新時間:2025-04-24 10:12

 (國民技術(shù))N32G45x 系列32_bit ARM? Cortex?_M4 微控制器用戶手冊
(國民技術(shù))N32G45x 系列32_bit ARM? Cortex?_M4 微控制器用戶手冊 操作系統(tǒng)真相還原
操作系統(tǒng)真相還原設(shè)計資源 培訓(xùn) 開發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩(wěn)定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析

- 英飛凌微控制器:以全新實惠套件和強大開發(fā)環(huán)境為開發(fā)者提供支持
- iTOP-i.MX6開發(fā)板設(shè)備數(shù)驅(qū)動Menuconfig的用法
- 迅為IMX6ULL開發(fā)板Qt for Android搭建開發(fā)環(huán)境
- 迅為i.MX8M mini開發(fā)板Windots QT系統(tǒng)開發(fā)環(huán)境搭建
- 迅為IMX8MM開發(fā)板Yocto系統(tǒng)使用Gstarwmra(一)
- 迅為IMX8M mini開發(fā)板Linix系統(tǒng)修改默認(rèn)屏幕
- iTOP-4412開發(fā)板支持4G以上文件系統(tǒng)擴展
- 迅為IMX8MM開發(fā)板Yocto系統(tǒng)設(shè)置開機自啟動
- 迅為IMX6Q開發(fā)板 Buildroot文件系統(tǒng)mqtt測試

- L7815A 高輸入電壓電路的典型應(yīng)用(配置 1)
- LTC2624 的典型應(yīng)用 - 采用 16 引腳 SSOP 的四通道 12 位軌至軌 DAC
- LTC2431 的典型應(yīng)用 - 具有差分輸入和差分基準(zhǔn)的 20 位無延遲 Delta Sigma ADC
- 使用符合 EN55022 A 類(雙輸出)EMC 濾波的 RP40-4812SFR DC/DC 轉(zhuǎn)換器的典型應(yīng)用
- MSAN-144 MT8841主叫號碼識別電路在微控制器和串并轉(zhuǎn)換器中的應(yīng)用
- 任意波形發(fā)生器
- 用于電子鎮(zhèn)流器的 100W、400V 交流轉(zhuǎn)直流單路輸出電源
- 小汐 -> 離線語音智能小球燈
- 基于 MCF5233CVM150 MPU ColdFire MCF5xxx 處理器的 M5235EVB、M523xEVB 評估板
- 使用 Infineon Technologies AG 的 OM8500SC 的參考設(shè)計






- 特斯拉:美國交付的Model Y/3電池包已實現(xiàn)100%美國生產(chǎn)
- 地平線與博世深化合作,攜手為多家車企提供輔助駕駛產(chǎn)品
- 強化中國市場戰(zhàn)略布局,德州儀器正靈活應(yīng)對全球關(guān)稅挑戰(zhàn)
- Molex莫仕通過本地合作和創(chuàng)新加強支持中國汽車行業(yè)
- 貿(mào)澤開售Texas Instruments適用于高分辨率AR HUD的 全新DLP4620S-Q1 0.46"汽車數(shù)字微鏡器件
- ROHM推出高功率密度的新型SiC模塊,將實現(xiàn)車載充電器小型化!
- 用上車規(guī)級UFS 4.0,讓出行變得高效且可靠
- 車載測試技術(shù)解析:聚焦高帶寬、多通道同步采集與協(xié)議分析
- 傳統(tǒng)晶體管的極限!臺積電3nm N3P已量產(chǎn)
- 分析師稱H20出口管制毫無意義:對中國AI發(fā)展影響不大
- 10秒鐘調(diào)查!TI 產(chǎn)品封裝你來左右!!!
- Arrow&allegro有獎直播:下一代磁感應(yīng)解決方案:XtremeSense™ TMR 技術(shù)如何促進高效應(yīng)用
- 瑞薩電子最新觸控微控制器R7F0C208入門套件免費申請,參與申請還能贏好禮!
- TI隔離技術(shù)知多少?答題贏好禮!
- 有獎直播|TI 帶您領(lǐng)略互聯(lián)、高效的智能家居方案
- 泰克示波器旅行指南 更高帶寬、更低噪聲、更多通道
- 將想法變成現(xiàn)實,Maxim MAX32630FTHR創(chuàng)意設(shè)計大賽,重磅開啟!
- 有獎報名 | 安富利邀您參與2022國際工業(yè)博覽會!(11月30日-12月4日,上海)
- 【摸黑搶樓】贏大禮,關(guān)于示波器的狂想曲!正式開搶!!!
- 新型精密拋光耗材競爭力凸現(xiàn),金太陽去年凈利增16.97%
- 國產(chǎn)安全芯片供應(yīng)商華翼微終止了新三板掛牌
- 三星員工炒幣賺了2.3億后辭職
- 芯原戴偉進:公司IP經(jīng)過多年技術(shù)演進,市場上已有數(shù)億產(chǎn)品
- 產(chǎn)銷兩旺,揚杰科技第一季度凈利潤同比增179.70%
- 現(xiàn)在電動汽車為何不用電機直接驅(qū)動車輪?
- Nordic Semiconductor的nRF9160 SiP器件,輕松接入物聯(lián)網(wǎng)
- 用于所有驅(qū)動方案和自動駕駛的機電式制動力放大器
- 比妖魔化固態(tài)電池更可怕的是什么?
- 空氣產(chǎn)品公司持續(xù)加強在京津冀戰(zhàn)略性市場的供應(yīng)地位







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號