CAN基礎(chǔ)知識(shí)介紹文中介紹了CAN協(xié)議的基礎(chǔ)知識(shí),以及STM32F4芯片的CAN控制器相關(guān)知識(shí),下面將通過(guò)實(shí)例,利用STM32CubeMX圖形化配置工具,來(lái)實(shí)現(xiàn)CAN通訊的環(huán)回測(cè)試
1. STM32CubeMX配置
CAN是掛載在APB1總線上,設(shè)置PCLK1時(shí)鐘頻率到最大45MHz

激活CAN1,配置位時(shí)序參數(shù),其他基本參數(shù)以及工作模式(此處設(shè)置為L(zhǎng)oopback環(huán)回模式)

CAN波特率的計(jì)算公式:只需要知道BS1和BS2的設(shè)置,以及APB1的時(shí)鐘頻率,就可以方便的計(jì)算出波特率。比如設(shè)置TS1=8、TS2=6和BRP=6,在APB1頻率為45Mhz的條件下,即可得到CAN通信的波特率=45000/6/(8+6+1)=500Kbps
2e5c7548-8c00-11ed-bfe3-dac502259ad0.png
激活USART1作為調(diào)試串口,配置相關(guān)LED對(duì)應(yīng)的GPIO引腳作為指示燈
2.MDK-ARM編程
2.1 幾個(gè)重要的結(jié)構(gòu)體
主控寄存器 CAN_MCR:負(fù)責(zé)管理 CAN 的工作模式
typedefstruct
{
uint32_tPrescaler;/*配置CAN外設(shè)的時(shí)鐘分頻,可設(shè)置為1-1024*/
uint32_tMode;/*配置CAN的工作模式,回環(huán)或正常模式*/
uint32_tSyncJumpWidth;/*配置SJW極限值*/
uint32_tTimeSeg1;/*配置BS1段長(zhǎng)度*/
uint32_tTimeSeg2;/*配置BS2段長(zhǎng)度*/
FunctionalStateTimeTriggeredMode; /*是否使能TTCM時(shí)間觸發(fā)功能*/
FunctionalStateAutoBusOff; /*是否使能ABOM自動(dòng)離線管理功能*/
FunctionalStateAutoWakeUp; /*是否使能AWUM自動(dòng)喚醒功能*/
FunctionalStateAutoRetransmission;/*是否使能NART自動(dòng)重傳功能*/
FunctionalStateReceiveFifoLocked;/*是否使能RFLM鎖定FIFO功能*/
FunctionalStateTransmitFifoPriority;/*配置TXFP報(bào)文優(yōu)先級(jí)的判定方法*/
}CAN_InitTypeDef;
發(fā)送及接收頭結(jié)構(gòu)體:主要用于構(gòu)造發(fā)送報(bào)文,以及接收?qǐng)?bào)文。收發(fā)發(fā)文時(shí),需要自定義頭結(jié)構(gòu)體變量
typedefstruct
{
uint32_tStdId;/*存儲(chǔ)報(bào)文的標(biāo)準(zhǔn)標(biāo)識(shí)符11位,0-0x7FF.*/
uint32_tExtId;/*存儲(chǔ)報(bào)文的擴(kuò)展標(biāo)識(shí)符29位,0-0x1FFFFFFF.*/
uint32_tIDE;/*存儲(chǔ)IDE擴(kuò)展標(biāo)志*/
uint32_tRTR;/*存儲(chǔ)RTR遠(yuǎn)程幀標(biāo)志*/
uint32_tDLC;/*存儲(chǔ)報(bào)文數(shù)據(jù)段的長(zhǎng)度,0-8*/
FunctionalStateTransmitGlobalTime;
}CAN_TxHeaderTypeDef;
typedefstruct
{
uint32_tStdId;/*存儲(chǔ)報(bào)文的標(biāo)準(zhǔn)標(biāo)識(shí)符11位,0-0x7FF.*/
uint32_tExtId;/*存儲(chǔ)報(bào)文的擴(kuò)展標(biāo)識(shí)符29位,0-0x1FFFFFFF.*/
uint32_tIDE;/*存儲(chǔ)IDE擴(kuò)展標(biāo)志*/
uint32_tRTR;/*存儲(chǔ)RTR遠(yuǎn)程幀標(biāo)志*/
uint32_tDLC;/*存儲(chǔ)報(bào)文數(shù)據(jù)段的長(zhǎng)度,0-8*/
uint32_tTimestamp;
uint32_tFilterMatchIndex;
}CAN_RxHeaderTypeDef;
過(guò)濾器結(jié)構(gòu)體:STM32CubeMX不會(huì)初始化過(guò)濾器的相關(guān)內(nèi)容,需要自己添加
typedefstruct
{
uint32_tFilterIdHigh;/*CAN_FxR1寄存器的高16位*/
uint32_tFilterIdLow;/*CAN_FxR1寄存器的低16位*/
uint32_tFilterMaskIdHigh;/*CAN_FxR2寄存器的高16位*/
uint32_tFilterMaskIdLow;/*CAN_FxR2寄存器的低16位*/
uint32_tFilterFIFOAssignment;/*設(shè)置經(jīng)過(guò)篩選后數(shù)據(jù)存儲(chǔ)到哪個(gè)接收FIFO*/
uint32_tFilterBank;/*篩選器編號(hào),范圍0-27,CAN1是0-13,CAN2是14-27*/
uint32_tFilterMode;/*篩選器模式*/
uint32_tFilterScale;/*設(shè)置篩選器的尺度*/
uint32_tFilterActivation;/*是否使能本篩選器*/
uint32_tSlaveStartFilterBank;/*CAN2起始過(guò)濾器組*/
}CAN_FilterTypeDef;
2.2 程序編寫
生成工程后,打開(kāi)can.c文件,可見(jiàn)STM32CubeMX已經(jīng)對(duì)位時(shí)序參數(shù)、其他基本參數(shù)以及工作模式進(jìn)行了初始化。但是并沒(méi)有初始化過(guò)濾器的相關(guān)內(nèi)容,因此需要我們自己添加,并在CAN初始化時(shí)調(diào)用
//下面的設(shè)置只使能了FIFO0,并不過(guò)濾任何消息
voidCAN_Filter_Config(){
CAN_FilterTypeDefsFilterConfig;
sFilterConfig.FilterBank=0;//篩選器編號(hào),CAN1是0-13,CAN2是14-27
sFilterConfig.FilterMode=CAN_FILTERMODE_IDMASK;//采用掩碼模式
sFilterConfig.FilterScale=CAN_FILTERSCALE_32BIT;//設(shè)置篩選器的尺度,采用32位
sFilterConfig.FilterIdHigh=0X0000;//過(guò)濾器ID高16位,即CAN_FxR1寄存器的高16位
sFilterConfig.FilterIdLow=0X0000;//過(guò)濾器ID低16位,即CAN_FxR1寄存器的低16位
sFilterConfig.FilterMaskIdHigh=0X0000;//過(guò)濾器掩碼高16位,即CAN_FxR2寄存器的高16位
sFilterConfig.FilterMaskIdLow=0X0000;//過(guò)濾器掩碼低16位,即CAN_FxR2寄存器的低16位
sFilterConfig.FilterFIFOAssignment=CAN_RX_FIFO0;//設(shè)置經(jīng)過(guò)篩選后數(shù)據(jù)存儲(chǔ)到哪個(gè)接收FIFO
sFilterConfig.FilterActivation=ENABLE;//是否使能本篩選器
sFilterConfig.SlaveStartFilterBank=14;//指定為CAN1分配多少個(gè)濾波器組
if(HAL_CAN_ConfigFilter(&hcan1,&sFilterConfig)!=HAL_OK)
{
Error_Handler();
}
}
編寫發(fā)送和接收數(shù)據(jù)函數(shù):此處將格式固定為標(biāo)準(zhǔn)數(shù)據(jù)幀,ID為12
uint8_tCAN1_Send_Msg(uint8_t*msg,uint8_tlen){
uint16_ti=0;
uint32_ttxMailBox;
uint8_tsend_buf[8];
txHeader.StdId=12;
txHeader.ExtId=12;
txHeader.IDE=CAN_ID_STD;
txHeader.RTR=CAN_RTR_DATA;
txHeader.DLC=len;
for(i=0;i< len; i++)
send_buf[i] = msg[i];
if(HAL_CAN_AddTxMessage(&hcan1, &txHeader, send_buf, &txMailBox) != HAL_OK)
return 1;
return 0;
}
uint8_t CAN1_Recv_Msg(uint8_t *buf){
uint16_t i = 0;
HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &rxHeader, buf);
if(rxHeader.IDE == CAN_ID_STD)
printf('StdId ID: %d
', rxHeader.StdId);
else
printf('ExtId ID: %d
', rxHeader.ExtId);
printf('CAN IDE: %d
', rxHeader.IDE);
printf('CAN RTR: %d
', rxHeader.RTR);
printf('CAN DLC: %d
', rxHeader.DLC);
printf('Recv Data: ');
for(i = 0; i < rxHeader.DLC; i++)
printf('%c',buf[i]);
printf('
');
return rxHeader.DLC;
}
默認(rèn)Cubemx生成的代碼并沒(méi)有can start,沒(méi)有調(diào)用HAL_CAN_Start(&hcan1) 來(lái)使能CAN,因此需要在CAN初始化代碼中添加
voidMX_CAN1_Init(void){
......
/*USERCODEBEGINCAN1_Init2*/
CAN_Filter_Config();
HAL_CAN_Start(&hcan1);
/*USERCODEENDCAN1_Init2*/
}
主函數(shù)main.c中,代碼如下
intmain(void){
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_CAN1_Init();
MX_USART1_UART_Init();
/*USERCODEBEGIN2*/
uint8_tret,i;
printf('CANTesting....!
');
uint8_ttxdata[8]={76,79,79,80,66,65,67,75};
uint8_trxdata[8];
/*USERCODEEND2*/
/*Infiniteloop*/
/*USERCODEBEGINWHILE*/
while(1)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_1);
HAL_Delay(1000);
printf('StartSenddata...
');
ret=CAN1_Send_Msg(txdata,8);
if(ret==0)
printf('CANSendsuccess!
');
else
printf('CANSendfailed!
');
CAN1_Recv_Msg(rxdata);
printf('+++++++++++++++++++++++++++++++
');
/*USERCODEENDWHILE*/
/*USERCODEBEGIN3*/
}
/*USERCODEEND3*/
}
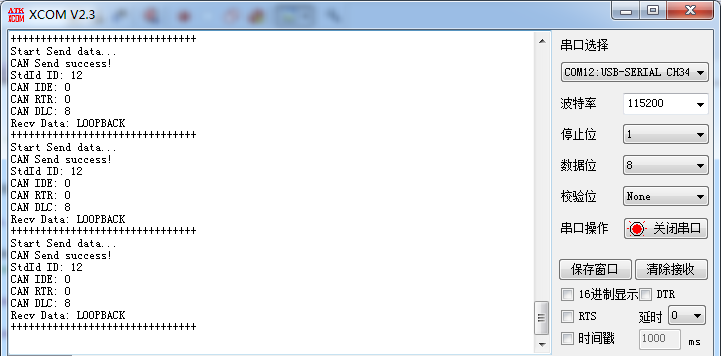
3. 下載測(cè)試
編譯無(wú)誤后下載到開(kāi)發(fā)板,可以看到系統(tǒng)運(yùn)行時(shí)D1指示燈不斷閃爍,串口不斷的打印CAN環(huán)回測(cè)試的數(shù)據(jù)
上一篇:基于STM32單片機(jī)的火災(zāi)防盜系統(tǒng)設(shè)計(jì)
下一篇:STM32H5開(kāi)發(fā)(4)----開(kāi)發(fā)板介紹
推薦閱讀最新更新時(shí)間:2025-04-23 19:05

 WeActStudio的STM32G431CoreBoard開(kāi)發(fā)資料
WeActStudio的STM32G431CoreBoard開(kāi)發(fā)資料 手把手教你CAN總線
手把手教你CAN總線 操作系統(tǒng)真相還原
操作系統(tǒng)真相還原設(shè)計(jì)資源 培訓(xùn) 開(kāi)發(fā)板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實(shí)現(xiàn)回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進(jìn)行通信丟包和多包案例分享
- 【下載】LAT1511 運(yùn)行Ux_Host_HUB_HID_MSC通過(guò)Hub連接U盤讀寫不穩(wěn)定問(wèn)題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯(cuò)誤問(wèn)題解析

- 英飛凌微控制器:以全新實(shí)惠套件和強(qiáng)大開(kāi)發(fā)環(huán)境為開(kāi)發(fā)者提供支持
- iTOP-i.MX6開(kāi)發(fā)板設(shè)備數(shù)驅(qū)動(dòng)Menuconfig的用法
- 迅為IMX6ULL開(kāi)發(fā)板Qt for Android搭建開(kāi)發(fā)環(huán)境
- 迅為i.MX8M mini開(kāi)發(fā)板Windots QT系統(tǒng)開(kāi)發(fā)環(huán)境搭建
- 迅為IMX8MM開(kāi)發(fā)板Yocto系統(tǒng)使用Gstarwmra(一)
- 迅為IMX8M mini開(kāi)發(fā)板Linix系統(tǒng)修改默認(rèn)屏幕
- iTOP-4412開(kāi)發(fā)板支持4G以上文件系統(tǒng)擴(kuò)展
- 迅為IMX8MM開(kāi)發(fā)板Yocto系統(tǒng)設(shè)置開(kāi)機(jī)自啟動(dòng)
- 迅為IMX6Q開(kāi)發(fā)板 Buildroot文件系統(tǒng)mqtt測(cè)試

- 【上海應(yīng)用技術(shù)大學(xué)】簡(jiǎn)易電子負(fù)載+吳炎蒲
- 【訓(xùn)練營(yíng)_進(jìn)階班】物聯(lián)網(wǎng)繼電器
- BGA324封裝的SPC564系列器件的子板/適配器板
- VNH5050A評(píng)估板
- LT1085CM-3.6、3.6V/7.5A 低壓差穩(wěn)壓器的典型應(yīng)用電路
- LTC2152IUJ-14、14 位、250Msps 模數(shù)轉(zhuǎn)換器的典型應(yīng)用
- LTC3890EUH 高效雙路 8.5V/3.3V 降壓轉(zhuǎn)換器典型應(yīng)用電路
- USB擴(kuò)展器-V1
- 具有可調(diào)電流限制的 NCV47701 5 V 至 20 V 可調(diào)低壓差穩(wěn)壓器的典型應(yīng)用
- VN7003AH評(píng)估板






- 強(qiáng)強(qiáng)聯(lián)合再進(jìn)階!理想AD Pro輔助駕駛正式升級(jí)搭載地平線征程6M
- 英特爾與黑芝麻智能簽署合作備忘錄,聯(lián)合發(fā)布艙駕融合平臺(tái)
- 英特爾與面壁智能宣布建立戰(zhàn)略合作伙伴關(guān)系,共同研發(fā)端側(cè)原生智能座艙
- 芯馳科技發(fā)布X10,打造全民AI時(shí)代座艙處理器新標(biāo)桿
- 精準(zhǔn)適配,輕裝全能!芯馳發(fā)布E3系列高端智控MCU三大應(yīng)用場(chǎng)景
- 場(chǎng)景定義、精準(zhǔn)創(chuàng)「芯」,芯馳全新發(fā)布AI座艙處理器和高端智控系列
- Arm 技術(shù)加持,地平線以 HSD 及征程 6P 推動(dòng)汽車智能化變革
- 華為自動(dòng)駕駛技術(shù)解讀
- 加速電動(dòng)化轉(zhuǎn)型,邦迪汽車系統(tǒng)攜多款創(chuàng)新產(chǎn)品首秀2025上海車展
- 數(shù)據(jù)中心面臨電力約束挑戰(zhàn),推動(dòng)GenAI終端發(fā)展
- TI 高精度實(shí)驗(yàn)室信號(hào)鏈精品課大作戰(zhàn)——你學(xué)習(xí)我送禮!
- 有獎(jiǎng)直播|TI Sitara™ 產(chǎn)品在智能電網(wǎng)中的應(yīng)用
- 參與e絡(luò)盟與 TE 傳感器的問(wèn)卷活動(dòng),贏50元亞馬遜購(gòu)物券!
- Nexperia ESD 應(yīng)用手冊(cè)|讀 ESD 干貨答題贏好禮
- 西門子精彩視頻限時(shí)免費(fèi)|利用電子產(chǎn)品生命周期管理 (PLM) 更快地交付更多產(chǎn)品
- 有獎(jiǎng)直播|解鎖汽車電子黑科技 開(kāi)創(chuàng)未來(lái)駕乘新境界
- 【Molex莫仕工業(yè)通訊與安全解決方案】
- 【ST板卡來(lái)了(下)】 品讀STM32實(shí)戰(zhàn)經(jīng)驗(yàn),汲取FAE經(jīng)驗(yàn)闖關(guān)去抽獎(jiǎng)
- 工信部:預(yù)計(jì)明年下半年推出第一款5G手機(jī)
- 外形與小米6X一致 紅米新機(jī):5.99英寸屏/4G內(nèi)存
- 中國(guó)電科38所發(fā)布“魂芯二號(hào)A”芯片 每秒千億次浮點(diǎn)運(yùn)算
- 籌資6.62億美元!國(guó)家大基金和大唐電信增持SMIC,占36.64%
- 蘋果A12處理器曝光:臺(tái)積電7nm工藝 速度提升20%
- 谷歌AR眼鏡已經(jīng)涼涼了,蘋果仍不死心?
- 選購(gòu)彩電不可忽視的參數(shù)之一:電視芯片
- Fitbit最終還是要被谷歌母公司Alphabet收購(gòu)
- 美電子煙巨頭 Juul Labs年底將裁員500人
- “機(jī)器人城管”助力城市精細(xì)化管理







 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)