0.前言
對于大多數單片機來說,I2C成了一個老大難問題。從51時代開始,軟件模擬I2C成了主流,甚至到ARMCortex M3大行其道的今天,軟件模擬I2C依然是使用最廣的方法。雖然軟件模擬可以解決所有的問題,但是總感覺沒有充分發揮MCU內部的硬件資源。查閱了所有關于MSP430F5系列的圖書,沒有關于硬件I2C的應用代碼,自己通過調試摸索,把經驗總結之后和大家分享,希望大家喜歡。同時,I2C的使用可以分為等待法和中斷法,從理解的角度來說等待法思路清晰易于上手,從功耗的角度出發,中斷法可以靈活的進入低功耗模式,但是不易理解。本文先從等待法入手。
MSP430F5系列的硬件I2C使用大致會有以下問題:
【I2C地址設定】一般情況下I2C的7位地址被寫成了8位長度,最低位無效。例如AT24C02的I2C地址為0xA0,其實真正的7位地址為0x50。而MSP430正是需要填入這7位地址0x50。
【I2C停止位發送】在I2C讀操作過程中,讀取最后一個字節之后MCU應向從機發送無應答,MSP430F5系列的MCU發送無應答的操作將自動完成,這就以為在讀取最后一個字節內容時,應先操作停止位相關寄存器。
【 I2C起始位發送】如果仔細分析MSP430F5參考手冊,將會發現讀操作和寫操作發送I2C起始位時略有不同。寫操作時需要先向TXBUF中寫入數據,之后才可以等待TXSTT標志位變為0,而讀操作和寫操作稍有不同。
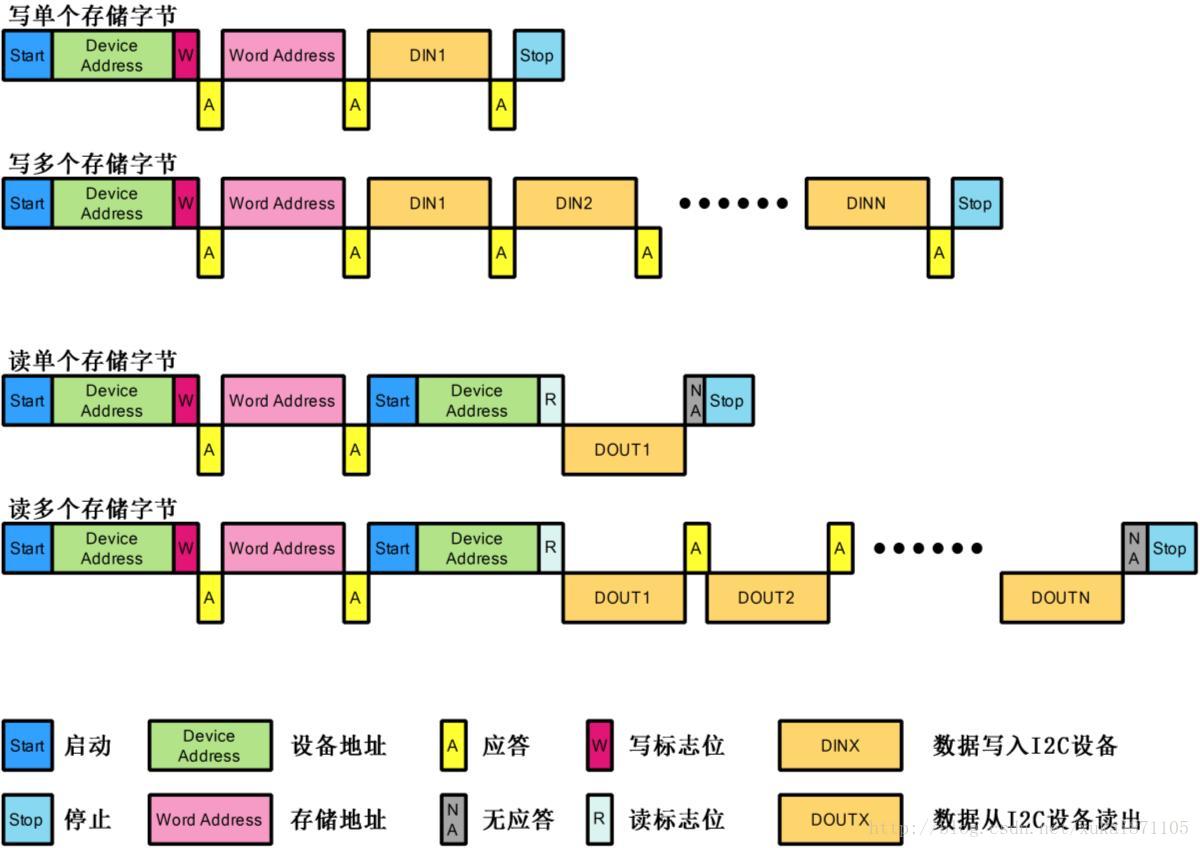
【AT24C02操作時序圖】
1.初始化設置
1.1代碼實現
void ucb0_config(void)
{
P3SEL &= ~BIT2; // P3.2@UCB0SCL
P3DIR |= BIT2;
P3OUT |= BIT2;
// 輸出9個時鐘以恢復I2C總線狀態
for( uint8_t i= 0; i <9 ; i++)
{
P3OUT |= BIT2;
__delay_cycles(8000);
P3OUT &= ~BIT2;
__delay_cycles(8000);
}
P3SEL |= (BIT1 + BIT2); // P3.1@UCB0SDAP3.2@UCB0SCL
// P3.1@ISP.1 P3.2@ISP.5
UCB0CTL1 |= UCSWRST;
UCB0CTL0 = UCMST+ UCMODE_3 + UCSYNC; // I2C主機模式
UCB0CTL1 |= UCSSEL_2; // 選擇SMCLK
UCB0BR0 = 40;
UCB0BR1 = 0;
UCB0CTL0 &= ~UCSLA10; // 7位地址模式
UCB0I2CSA = EEPROM_ADDRESS; // EEPROM地址
UCB0CTL1 &= ~UCSWRST;
}
1.2代碼分析
I2C從設備的地址一般有以下通俗說法——7位地址,寫地址(寫控制字)和讀地址(讀控制字)。1個I2C通信的控制字節(I2C啟動之后傳送的第一個字節)由7位I2C地址和1位讀寫標志位組成,7位I2C地址即7位地址,若讀寫標志位為讀標志(讀寫標志位置位)加上7位I2C地址便組成了讀地址(讀控制字),若讀寫標志位為寫標志(讀寫標志位清零)加上7位地址便組成了寫地址(寫控制字)。例如AT24C02的I2C7位地址為0x50,讀地址(讀控制字)為0xA1,寫地址(寫控制字)為0xA1。
在MSP430F5系列中,I2CSA地址寄存器應寫入7位地址,參照上面的例子應寫入0X50。至于I2C讀寫位的控制由CTL1寄存器完成,用戶無需干預。
在I2C設置開始之前,可以先通過SCL端口發送9個時鐘信號,該時鐘信號可以是I2C從機芯片從一種錯誤的通信狀態恢復,雖然這9個時鐘信號不起眼但是對于調試過程來說非常有用。例如在調試過程中,錯誤的發送了停止位,若再次啟動調試則I2C從設備仍處于一種錯誤的狀態,這9個時鐘信號可以把I2C從設備從錯誤的狀態“拉”回來。
2.寫單個字節
向I2C從設備寫入單個字節應該是最為簡單的一個操作,因為所有的控制權都在主機手中。寫單個字節實際包括了2個重要部分,一個便是寫寄存器地址,另一個便是寫寄存器內容。對于AT24C02而言,存儲內容的字節長度為一個字節,而對于容量更大的EEPROM而言,存儲地址可為兩個字節。
2.1 代碼實現
uint8_teeprom_writebyte( uint8_t word_addr, uint8_tword_value )
{
while( UCB0CTL1& UCTXSTP );
UCB0CTL1 |= UCTR; // 寫模式
UCB0CTL1 |= UCTXSTT; // 發送啟動位
UCB0TXBUF = word_addr; // 發送字節地址
// 等待UCTXIFG=1與UCTXSTT=0 同時變化等待一個標志位即可
while(!(UCB0IFG& UCTXIFG))
{
if( UCB0IFG& UCNACKIFG ) // 若無應答 UCNACKIFG=1
{
return 1;
}
}
UCB0TXBUF = word_value; // 發送字節內容
while(!(UCB0IFG& UCTXIFG)); // 等待UCTXIFG=1
UCB0CTL1 |= UCTXSTP;
while(UCB0CTL1& UCTXSTP); // 等待發送完成
return 0;
}
2.2 代碼分析
關于代碼出口的說明,關于I2C的讀寫函數,若返回值為0說明所有的操作正常,若返回值為非0說明操作有誤,例如1代表從機無應答。這種組合方式可能與各位的編程習慣有出入,一般認為返回1表示操作成功,而返回0表示操作失敗。這種方式的問題便是無法有效的表達錯誤原因,因為“0”只有一個,而非“0”卻有很多。
寫單個字節可以劃分為——從機寫地址發送、寄存器地址發送、寄存器內容發送。寄存器地址的發送由MSP430自動完成,這和軟件模擬的操作有所區別。請勿發送I2C從機地址,若操作AT24C02發送需要寫入的存儲字節的首地址即可。
在單字節和多字節寫操作過程中,尤其要注意UCTXSTT標志位的變化位置。UCTXSTT標志位會在從機接收完寫控制字節或讀控制字節之后變化,但是在寫控制字節發送之后,必須先填充TXBUF,再嘗試等待STT標志位復位,此時STT標志位和TXIFG標志位會同時變化。若從機沒有應答,那么NACK標志位也會發生變化。再次強調需要先填充TXBUF,在等待STT標志位復位。以下代碼將導致程序一直停留在while(UCB0IFG & UCTXSTT)處,具體的原因可查看MSP430參考手冊。
while( UCB0CTL1& UCTXSTP );
UCB0CTL1 |= UCTR; // 寫模式
UCB0CTL1 |= UCTXSTT; // 發送啟動位
// 等待UCTXSTT=0同時變化,但是很遺憾該變化不會發送
while(UCB0IFG& UCTXSTT);
UCB0TXBUF = word_addr; // 發送字節地址
3.寫多個字節
3.1代碼實現
uint8_teeprom_writepage( uint8_t word_addr, uint8_t *pword_buf, uint8_t len)
{
while( UCB0CTL1& UCTXSTP );
UCB0CTL1 |= UCTR; // 寫模式
UCB0CTL1 |= UCTXSTT; // 發送啟動位
UCB0TXBUF = word_addr; // 發送字節地址
// 等待UCTXIFG=1與UCTXSTT=0 同時變化等待一個標志位即可
while(!(UCB0IFG& UCTXIFG))
{
if( UCB0IFG& UCNACKIFG ) // 若無應答 UCNACKIFG=1
{
return 1;
}
}
for( uint8_t i= 0; i < len; i++)
{
UCB0TXBUF = *pword_buf++; // 發送寄存器內容
while(!(UCB0IFG& UCTXIFG)); // 等待UCTXIFG=1
}
UCB0CTL1 |= UCTXSTP;
while(UCB0CTL1& UCTXSTP); // 等待發送完成
return 0;
}
3.2 代碼分析
多字節寫函數和單字節寫函數相似,不做過多的解釋。
4.讀單個字節
單字節讀函數是4中讀寫函數中最為復雜的,復雜的原因在于讀最后一個字節之前就需要操作UCTXSTP標志位。
4.1 代碼實現
uint8_teeprom_readbyte( uint8_t word_addr, uint8_t *pword_value)
{
UCB0CTL1 |= UCTR; // 寫模式
UCB0CTL1 |= UCTXSTT; // 發送啟動位和寫控制字節
UCB0TXBUF = word_addr; //發送字節地址,必須要先填充TXBUF
// 等待UCTXIFG=1與UCTXSTT=0 同時變化等待一個標志位即可
while(!(UCB0IFG& UCTXIFG))
{
if( UCB0IFG& UCNACKIFG ) // 若無應答 UCNACKIFG=1
{
return 1;
}
}
UCB0CTL1 &= ~UCTR; //讀模式
UCB0CTL1 |= UCTXSTT; // 發送啟動位和讀控制字節
while(UCB0CTL1& UCTXSTT); // 等待UCTXSTT=0
// 若無應答 UCNACKIFG = 1
UCB0CTL1 |= UCTXSTP; // 先發送停止位
while(!(UCB0IFG& UCRXIFG)); // 讀取字節內容
*pword_value = UCB0RXBUF; // 讀取BUF寄存器在發送停止位之后
while( UCB0CTL1& UCTXSTP );
return 0;
}
4.2代碼分析
這段代碼給人一個錯覺,MSP430先發送了停止位,然后再讀取了一個字節內容。其實實際情況并不是這樣的。I2C讀操作時,主機讀取最后一個字節內容之后,應向從機發送無應答NACK(無應答區別于應答),之后主機發送停止位。MSP430為了完成這一組合動作,要求用戶提前操作UCTXSTP標志位,在讀取RXBUF之后做出發送NACK和I2C停止位的“組合動作”。
while(!(UCB0IFG& UCRXIFG));
*pword_value = UCB0RXBUF; // 讀取BUF寄存器在發送停止位之后
UCB0CTL1 |= UCTXSTP; // 發送停止位
以上代碼可能導致后續的I2C操作無法進行。
5.讀多個字節
5.1代碼實現
uint8_t eeprom_readpage(uint8_t word_addr, uint8_t *pword_buf, uint8_t len )
{
while( UCB0CTL1& UCTXSTP );
UCB0CTL1 |= UCTR; // 寫模式
UCB0CTL1 |= UCTXSTT; // 發送啟動位和寫控制字節
UCB0TXBUF = word_addr; // 發送字節地址
// 等待UCTXIFG=1與UCTXSTT=0 同時變化等待一個標志位即可
while(!(UCB0IFG& UCTXIFG))
{
if( UCB0IFG& UCNACKIFG ) // 若無應答 UCNACKIFG=1
{
return 1;
}
}
UCB0CTL1 &= ~UCTR; // 讀模式
UCB0CTL1 |= UCTXSTT; // 發送啟動位和讀控制字節
while(UCB0CTL1& UCTXSTT); // 等待UCTXSTT=0
// 若無應答 UCNACKIFG = 1
for( uint8_t i= 0; i< len -1 ; i++)
{
while(!(UCB0IFG& UCRXIFG)); // 讀取字節內容,不包括最后一個字節內容
*pword_buf++= UCB0RXBUF;
}
UCB0CTL1 |= UCTXSTP; // 在接收最后一個字節之前發送停止位
while(!(UCB0IFG& UCRXIFG)); // 讀取最后一個字節內容
*pword_buf = UCB0RXBUF;
while( UCB0CTL1& UCTXSTP );
return 0;
}
5.2代碼分析
讀單個字節和寫單個字節相似。唯一需要注意的是,寫操作需要先填充TXBUF,而讀操作不存在這個問題。試想一下,I2C寫操作時必定會向I2C從機寫入一個字節內容,所以先填充TXBUF也是合情合理的事情,填充TXBUF之后MSP430會進行一連串的動作——發送I2C起始位、I2C讀控制器和寫入從機的第一個字節。
6 單元測試
單元測試分為兩個部分。單字節寫函數和單字節讀函數分為一組,先使用單字節邪惡函數向某地址寫入某內容,在使用單字節讀函數讀出某內容,如果寫入的參數和讀出的內容相同,則測試通過。多字節寫函數和多字節度函數分為一組,測試過程相似,不同的是寫入的內容從一個變為了連續8個。請注意AT24C02的頁大小為8,若從頁首地址開始,最大的寫字節個數為8。


上一篇:MSP430晶振配置詳解
下一篇:MSP430+DMA
推薦閱讀最新更新時間:2025-04-23 23:19

 嵌入式系統技術與設計
嵌入式系統技術與設計 操作系統真相還原
操作系統真相還原 TA75W558FU(TE12L,F
TA75W558FU(TE12L,F設計資源 培訓 開發板 精華推薦
- 【下載】LAT1526 利用SPI的下溢實現回顯功能
- 【下載】LAT1509 STM32G0B1的FDCAN進行通信丟包和多包案例分享
- 【下載】LAT1511 運行Ux_Host_HUB_HID_MSC通過Hub連接U盤讀寫不穩定問題分析
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯誤問題解析


- EV-VND7040AJ,VND7040AJ 電源開關評估板
- LT3990EMSE 5V 降壓轉換器的典型應用
- EFR32MG21 USB Stick
- LT3758、18V 至 72V 輸入、24V 輸出 SEPIC 轉換器的典型應用電路
- 用于電池反向保護的 LTC2953CDD-1 電壓監控器的典型應用電路
- 使用 ROHM Semiconductor 的 BD5247 的參考設計
- 具有自動 LED 照明效果的 ADP8866 電荷泵驅動 9 通道 LED 驅動器的典型應用
- 使用 Richtek Technology Corporation 的 RT8015D 的參考設計
- 具有關斷和錯誤輸出的 TC2186 50mA、100mA 和 150mA CMOS LDO 的典型應用
- EVAL-AD7192EBZ,用于 AD7192 4.8 kHz 超低噪聲 24 位 Sigma-Delta ADC 的評估套件













 京公網安備 11010802033920號
京公網安備 11010802033920號