RS232 標(biāo)準(zhǔn)是誕生于 RS485 之前的,但是 RS232 有幾處不足的地方:
接口的信號(hào)電平值較高,達(dá)到十幾 V,使用不當(dāng)容易損壞接口芯片,電平標(biāo)準(zhǔn)也與TTL 電平不兼容。
傳輸速率有局限,不可以過高,一般到一兩百千比特每秒(Kb/s)就到極限了。
接口使用信號(hào)線和 GND 與其它設(shè)備形成共地模式的通信,這種共地模式傳輸容易產(chǎn)生干擾,并且抗干擾性能也比較弱。
傳輸距離有限,最多只能通信幾十米。
通信的時(shí)候只能兩點(diǎn)之間進(jìn)行通信,不能夠?qū)崿F(xiàn)多機(jī)聯(lián)網(wǎng)通信。
針對(duì) RS232 接口的不足,就不斷出現(xiàn)了一些新的接口標(biāo)準(zhǔn),RS485 就是其中之一,它具備以下的特點(diǎn):
采用差分信號(hào)。我們?cè)谥v A/D 的時(shí)候,講過差分信號(hào)輸入的概念,同時(shí)也介紹了差分輸入的好處,最大的優(yōu)勢(shì)是可以抑制共模干擾。尤其當(dāng)工業(yè)現(xiàn)場環(huán)境比較復(fù)雜,干擾比較多時(shí),采用差分方式可以有效的提高通信可靠性。RS485 采用兩根通信線,通常用 A 和 B 或者 D+和 D-來表示。邏輯“1”以兩線之間的電壓差為+(0.2~6)V 表示,邏輯“0”以兩線間的電壓差為-(0.2~6)V 來表示,是一種典型的差分通信。
RS485 通信速率快,最大傳輸速度可以達(dá)到 10Mb/s 以上。
RS485 內(nèi)部的物理結(jié)構(gòu),采用的是平衡驅(qū)動(dòng)器和差分接收器的組合,抗干擾能力也大大增加。
傳輸距離最遠(yuǎn)可以達(dá)到 1200 米左右,但是它的傳輸速率和傳輸距離是成反比的,只有在 100Kb/s 以下的傳輸速度,才能達(dá)到最大的通信距離,如果需要傳輸更遠(yuǎn)距離可以使用中繼。
可以在總線上進(jìn)行聯(lián)網(wǎng)實(shí)現(xiàn)多機(jī)通信,總線上允許掛多個(gè)收發(fā)器,從現(xiàn)有的 RS485芯片來看,有可以掛 32、64、128、256 等不同個(gè)設(shè)備的驅(qū)動(dòng)器。
RS485 的接口非常簡單,與 RS232 所使用的 MAX232 是類似的,只需要一個(gè) RS485轉(zhuǎn)換器,就可以直接與單片機(jī)的 UART 串口連接起來,并且使用完全相同的異步串行通信協(xié)議。但是由于 RS485 是差分通信,因此接收數(shù)據(jù)和發(fā)送數(shù)據(jù)是不能同時(shí)進(jìn)行的,也就是說它是一種半雙工通信。那我們?nèi)绾闻袛嗍裁磿r(shí)候發(fā)送,什么時(shí)候接收呢?
RS485 轉(zhuǎn)換芯片很多,這節(jié)課我們以典型的 MAX485 為例講解 RS485 通信,如圖 18-1所示。

圖 18-1 MAX485 硬件接口
MAX485 是美信(Maxim)推出的一款常用 RS485 轉(zhuǎn)換器。其中 5 腳和 8 腳是電源引腳;6腳和 7 腳就是 RS485 通信中的 A 和 B 兩個(gè)引腳;1 腳和 4 腳分別接到單片機(jī)的 RXD 和 TXD引腳上,直接使用單片機(jī) UART 進(jìn)行數(shù)據(jù)接收和發(fā)送;2 腳和 3 腳是方向引腳,其中 2 腳是低電平使能接收器,3 腳是高電平使能輸出驅(qū)動(dòng)器,我們把這兩個(gè)引腳連到一起,平時(shí)不發(fā)送數(shù)據(jù)的時(shí)候,保持這兩個(gè)引腳是低電平,讓 MAX485 處于接收狀態(tài),當(dāng)需要發(fā)送數(shù)據(jù)的時(shí)候,把這個(gè)引腳拉高,發(fā)送數(shù)據(jù),發(fā)送完畢后再拉低這個(gè)引腳就可以了。為了提高 RS485 的抗干擾能力,需要在靠近 MAX485 的 A 和 B 引腳之間并接一個(gè)電阻,這個(gè)電阻阻值從 100歐到 1K 都是可以。
在這里我們還要介紹一下如何使用 KST-51 單片機(jī)開發(fā)板進(jìn)行外圍擴(kuò)展實(shí)驗(yàn)。我們的開發(fā)板只能把基本的功能給同學(xué)們做出來提供實(shí)驗(yàn)練習(xí),但是同學(xué)們學(xué)習(xí)的腳步不應(yīng)該停留在這個(gè)實(shí)驗(yàn)板上。如果想進(jìn)行更多的實(shí)驗(yàn),就可以通過單片機(jī)開發(fā)板的擴(kuò)展接口進(jìn)行擴(kuò)展實(shí)驗(yàn)。大家可以看到藍(lán)綠色的單片機(jī)座周圍有 32 個(gè)插針,這 32 個(gè)插針就是把單片機(jī)的 32 個(gè) IO 引腳全部都引出來了。在原理圖上體現(xiàn)出來的就是 J4、J5、J6、J7 這 4 個(gè)器件,如圖 18-2 所示。

圖 18-2 單片機(jī)擴(kuò)展接口
這 32 個(gè) IO 口中并不是所有的都可以用來對(duì)外擴(kuò)展,其中既作為數(shù)據(jù)輸出,又可以作為數(shù)據(jù)輸入的引腳是不可以用的,比如 P3.2、P3.4、P3.6 引腳,這三個(gè)引腳是不可用的。比如P3.2 這個(gè)引腳,如果我們用來擴(kuò)展,發(fā)送的信號(hào)如果和 DS18B20 的時(shí)序吻合,會(huì)導(dǎo)致 DS18B20拉低引腳,影響通信。除這 3 個(gè) IO 口以外的其它 29 個(gè),都可以使用杜邦線接上插針,擴(kuò)展出來使用。當(dāng)然了,如果把當(dāng)前的 IO 口應(yīng)用于擴(kuò)展功能了,板子上的相應(yīng)功能就實(shí)現(xiàn)不了了,也就是說需要擴(kuò)展功能和板載功能之間二選一。
在進(jìn)行 RS485 實(shí)驗(yàn)中,我們通信用的引腳必須是 P3.0 和 P3.1,此外還有一個(gè)方向控制引腳,我們使用杜邦線將其連接到 P1.7 上去。RS485 的另外一端,大家可以使用一個(gè) USB轉(zhuǎn) RS485 模塊,用雙絞線把開發(fā)板和模塊上的 A 和 B 分別對(duì)應(yīng)連起來,USB 那頭插入電腦,然后就可以進(jìn)行通信了。
學(xué)習(xí)了第 13 章實(shí)用的串口通信方法和程序后,做這種串口通信的方法就很簡單了,基本是一致的。我們使用實(shí)用串口通信例程的思路,做了一個(gè)簡單的程序,通過串口調(diào)試助手下發(fā)任意個(gè)字符,單片機(jī)接收到后在末尾添加“回車+換行”符后再送回,在調(diào)試助手上重新顯示出來,先把程序貼出來。
程序中需要注意的一點(diǎn)是:因?yàn)槠匠6际菍?MAX485 設(shè)置為接收狀態(tài),只有在發(fā)送數(shù)據(jù)的時(shí)候才將 MAX485 改為發(fā)送狀態(tài),所以在 UartWrite()函數(shù)開頭將 MAX485 方向引腳拉高,函數(shù)退出前再拉低。但是這里有一個(gè)細(xì)節(jié),就是單片機(jī)的發(fā)送和接收中斷產(chǎn)生的時(shí)刻都是在停止位的一半上,也就是說每當(dāng)停止位傳送了一半的時(shí)候,RI 或 TI 就已經(jīng)置位并且馬上進(jìn)入中斷(如果中斷使能的話)函數(shù)了,接收的時(shí)候自然不會(huì)存在問題,但發(fā)送的時(shí)候就不一樣了:當(dāng)緊接著向 SBUF 寫入一個(gè)字節(jié)數(shù)據(jù)時(shí),UART 硬件會(huì)在完成上一個(gè)停止位的發(fā)送后,再開始新字節(jié)的發(fā)送,但如果此時(shí)不是繼續(xù)發(fā)送下一個(gè)字節(jié),而是已經(jīng)發(fā)送完畢了,要停止發(fā)送并將 MAX485 方向引腳拉低以使 MAX485 重新處于接收狀態(tài)時(shí)就有問題了,因?yàn)檫@時(shí)候最后的這個(gè)停止位實(shí)際只發(fā)送了一半,還沒有完全完成,所以就有了 UartWrite()函數(shù)內(nèi)DelayX10us(5)這個(gè)操作,這是人為的增加了 50us 的延時(shí),這 50us 的時(shí)間正好讓剩下的一半停止位完成,那么這個(gè)時(shí)間自然就是由通信波特率決定的了,為波特率周期的一半。
/****************************RS485.c 文件程序源代碼*****************************/
純文本復(fù)制
#include
#include
sbit RS485_DIR = P1^7; //RS485 方向選擇引腳
bit flagFrame = 0; //幀接收完成標(biāo)志,即接收到一幀新數(shù)據(jù)
bit flagTxd = 0; //單字節(jié)發(fā)送完成標(biāo)志,用來替代 TXD 中斷標(biāo)志位
unsigned char cntRxd = 0; //接收字節(jié)計(jì)數(shù)器
unsigned char pdata bufRxd[64]; //接收字節(jié)緩沖區(qū)
extern void UartAction(unsigned char *buf, unsigned char len);
/* 串口配置函數(shù),baud-通信波特率 */
void ConfigUART(unsigned int baud){
RS485_DIR = 0; //RS485 設(shè)置為接收方向
SCON = 0x50; //配置串口為模式 1
TMOD &= 0x0F; //清零 T1 的控制位
TMOD |= 0x20; //配置 T1 為模式 2
TH1 = 256 - (11059200/12/32)/baud; //計(jì)算 T1 重載值
TL1 = TH1; //初值等于重載值
ET1 = 0; //禁止 T1 中斷
ES = 1; //使能串口中斷
TR1 = 1; //啟動(dòng) T1
}
/* 軟件延時(shí)函數(shù),延時(shí)時(shí)間(t*10)us */
void DelayX10us(unsigned char t){
do {
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
} while (--t);
}
/* 串口數(shù)據(jù)寫入,即串口發(fā)送函數(shù),buf-待發(fā)送數(shù)據(jù)的指針,len-指定的發(fā)送長度 */
void UartWrite(unsigned char *buf, unsigned char len){
RS485_DIR = 1; //RS485 設(shè)置為發(fā)送
while (len--){ //循環(huán)發(fā)送所有字節(jié)
flagTxd = 0; //清零發(fā)送標(biāo)志
SBUF = *buf++; //發(fā)送一個(gè)字節(jié)數(shù)據(jù)
while (!flagTxd); //等待該字節(jié)發(fā)送完成
}
DelayX10us(5); //等待最后的停止位完成,延時(shí)時(shí)間由波特率決定
RS485_DIR = 0; //RS485 設(shè)置為接收
}
/* 串口數(shù)據(jù)讀取函數(shù),buf-接收指針,len-指定的讀取長度,返回值-實(shí)際讀到的長度 */
unsigned char UartRead(unsigned char *buf, unsigned char len){
unsigned char i;
//指定讀取長度大于實(shí)際接收到的數(shù)據(jù)長度時(shí),
//讀取長度設(shè)置為實(shí)際接收到的數(shù)據(jù)長度
if (len > cntRxd){
len = cntRxd;
}
for (i=0; i *buf++ = bufRxd[i]; } cntRxd = 0; //接收計(jì)數(shù)器清零 return len; //返回實(shí)際讀取長度 } /* 串口接收監(jiān)控,由空閑時(shí)間判定幀結(jié)束,需在定時(shí)中斷中調(diào)用,ms-定時(shí)間隔 */ void UartRxMonitor(unsigned char ms){ static unsigned char cntbkp = 0; static unsigned char idletmr = 0; if (cntRxd > 0){ //接收計(jì)數(shù)器大于零時(shí),監(jiān)控總線空閑時(shí)間 if (cntbkp != cntRxd){ //接收計(jì)數(shù)器改變,即剛接收到數(shù)據(jù)時(shí),清零空閑計(jì)時(shí) cntbkp = cntRxd; idletmr = 0; }else{ //接收計(jì)數(shù)器未改變,即總線空閑時(shí),累積空閑時(shí)間 if (idletmr < 30){ //空閑計(jì)時(shí)小于 30ms 時(shí),持續(xù)累加 idletmr += ms; if (idletmr >= 30){ //空閑時(shí)間達(dá)到 30ms 時(shí),即判定為一幀接收完畢 flagFrame = 1; //設(shè)置幀接收完成標(biāo)志 } } } }else{ cntbkp = 0; } } /* 串口驅(qū)動(dòng)函數(shù),監(jiān)測(cè)數(shù)據(jù)幀的接收,調(diào)度功能函數(shù),需在主循環(huán)中調(diào)用 */ void UartDriver(){ unsigned char len; unsigned char pdata buf[40]; if (flagFrame){ //有命令到達(dá)時(shí),讀取處理該命令 flagFrame = 0; len = UartRead(buf, sizeof(buf)-2); //將接收到的命令讀取到緩沖區(qū)中 UartAction(buf, len); //傳遞數(shù)據(jù)幀,調(diào)用動(dòng)作執(zhí)行函數(shù) } } /* 串口中斷服務(wù)函數(shù) */ void InterruptUART() interrupt 4{ if (RI){ //接收到新字節(jié) RI = 0; //清零接收中斷標(biāo)志位 //接收緩沖區(qū)尚未用完時(shí),保存接收字節(jié),并遞增計(jì)數(shù)器 if (cntRxd < sizeof(bufRxd)){ bufRxd[cntRxd++] = SBUF; } } if (TI){ //字節(jié)發(fā)送完畢 TI = 0; //清零發(fā)送中斷標(biāo)志位 flagTxd = 1; //設(shè)置字節(jié)發(fā)送完成標(biāo)志 } } /*****************************main.c 文件程序源代碼******************************/ #include unsigned char T0RH = 0; //T0 重載值的高字節(jié) unsigned char T0RL = 0; //T0 重載值的低字節(jié) void ConfigTimer0(unsigned int ms); extern void UartDriver(); extern void ConfigUART(unsigned int baud); extern void UartRxMonitor(unsigned char ms); extern void UartWrite(unsigned char *buf, unsigned char len); void main(){ EA = 1; //開總中斷 ConfigTimer0(1); //配置 T0 定時(shí) 1ms ConfigUART(9600); //配置波特率為 9600 while (1){ UartDriver(); //調(diào)用串口驅(qū)動(dòng) } } /* 串口動(dòng)作函數(shù),根據(jù)接收到的命令幀執(zhí)行響應(yīng)的動(dòng)作 buf-接收到的命令幀指針,len-命令幀長度 */ void UartAction(unsigned char *buf, unsigned char len){ //在接收到的數(shù)據(jù)幀后添加換車換行符后發(fā)回 buf[len++] = '\r'; buf[len++] = '\n'; UartWrite(buf, len); } /* 配置并啟動(dòng) T0,ms-T0 定時(shí)時(shí)間 */ void ConfigTimer0(unsigned int ms){ unsigned long tmp; //臨時(shí)變量 tmp = 11059200 / 12; //定時(shí)器計(jì)數(shù)頻率 tmp = (tmp * ms) / 1000; //計(jì)算所需的計(jì)數(shù)值 tmp = 65536 - tmp; //計(jì)算定時(shí)器重載值 tmp = tmp + 33; //補(bǔ)償中斷響應(yīng)延時(shí)造成的誤差 T0RH = (unsigned char)(tmp>>8); //定時(shí)器重載值拆分為高低字節(jié) T0RL = (unsigned char)tmp; TMOD &= 0xF0; //清零 T0 的控制位 TMOD |= 0x01; //配置 T0 為模式 1 TH0 = T0RH; //加載 T0 重載值 TL0 = T0RL; ET0 = 1; //使能 T0 中斷 TR0 = 1; //啟動(dòng) T0 } /* T0 中斷服務(wù)函數(shù),執(zhí)行串口接收監(jiān)控 */ void InterruptTimer0() interrupt 1{ TH0 = T0RH; //重新加載重載值 TL0 = T0RL; UartRxMonitor(1); //串口接收監(jiān)控 } 現(xiàn)在看這種串口程序,是不是感覺很簡單了呢?串口通信程序我們反反復(fù)復(fù)的使用,加上隨著學(xué)習(xí)的模塊越來越多,實(shí)踐的越來越多,原先感覺很復(fù)雜的東西,現(xiàn)在就會(huì)感到簡單了。從設(shè)備管理器里可以查看所有的 COM 口號(hào),我們下載程序用的是 COM4,而 USB 轉(zhuǎn)RS485 虛擬的是 COM5,通信的時(shí)候我們用的是 COM5 口,如圖 18-3 所示。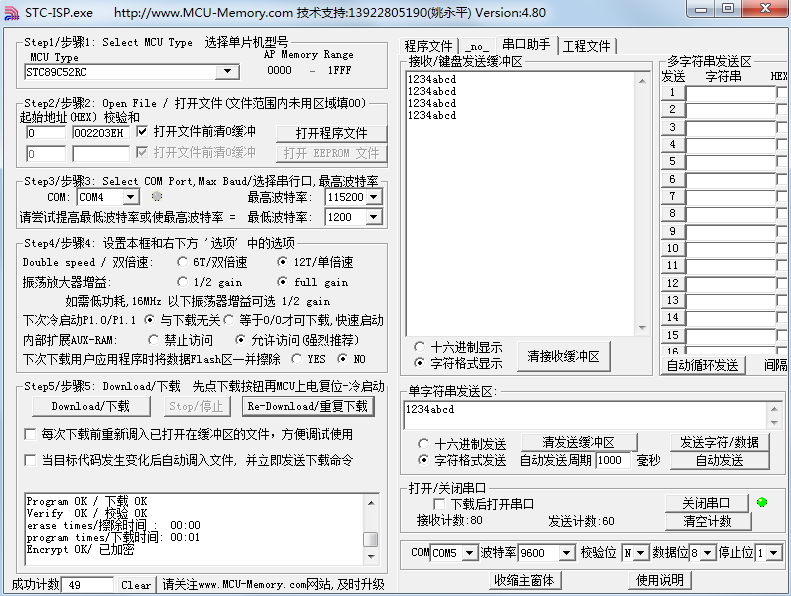
圖 18-3 RS485 通信試驗(yàn)設(shè)置和結(jié)果
上一篇:單片機(jī)D/A輸出
下一篇:單片機(jī)芯片之——圖解74HC595
推薦閱讀最新更新時(shí)間:2024-03-16 15:27

 單片機(jī)創(chuàng)新實(shí)踐應(yīng)用.
單片機(jī)創(chuàng)新實(shí)踐應(yīng)用. 數(shù)字電子技術(shù)基礎(chǔ)
數(shù)字電子技術(shù)基礎(chǔ)設(shè)計(jì)資源 培訓(xùn) 開發(fā)板 精華推薦
- 【下載】LAT1466 USB x Device HID Standalone的移植
- 【下載】LAT1488 STM32 USBxDevice MSC standalone移植示例
- 【下載】LAT1482 STM32G0單線串口通信幀錯(cuò)誤問題解析
- 【下載】LAT1473 STM32C0 HAL庫的SPI 驅(qū)動(dòng)導(dǎo)致的Hardfault問題分析
- 【下載】LAT1490 兩個(gè)STM32G0 I2C 通信異常的案例分析
- 【下載】LAT1470 SPI傳輸長度超過1024時(shí)出現(xiàn)異常的問題分析

- IAR攜手極海半導(dǎo)體,高效開發(fā)全球首款基于Cortex-M52的G32R501實(shí)時(shí)控制MCU
- 迅為IMX6ULL開發(fā)板交叉編譯器的安裝和使用
- 迅為-i.MX6ULL 開發(fā)板-移植OpenCv3.4.1-搭建編譯環(huán)境
- 嵌入式學(xué)習(xí)篇丨迅為4412開發(fā)板Android4.4系統(tǒng)編譯
- Linux系統(tǒng)編程篇丨迅為IMX6ULL-對(duì)應(yīng)視頻講解
- 嵌入式學(xué)習(xí)丨4412開發(fā)板-uboot源碼-匯編-源碼分析(一)嵌入式學(xué)習(xí)丨4412開發(fā)板-uboot源碼-匯
- 迅為IMX6ULL開發(fā)板-主頻和時(shí)鐘配置例程(二)
- 迅為IMX6ULL開發(fā)板-主頻和時(shí)鐘配置例程
- 迅為IMX6ULL開發(fā)板安裝VMware Tool工具







- Tremonia Mobility 通過西門子 Xcelerator 打造高效且可持續(xù)的小型巴士
- QNX為文遠(yuǎn)知行新一代ADAS平臺(tái)提供技術(shù)支持
- 文遠(yuǎn)知行采用BlackBerry QNX系統(tǒng),打造極致安全的ADAS解決方案
- IAR攜手極海半導(dǎo)體,高效開發(fā)全球首款基于Cortex-M52的G32R501實(shí)時(shí)控制MCU
- 中國發(fā)布HDMI和DisplayPort替代方案:GPMI接口來了
- 三星進(jìn)軍 AI 機(jī)器人領(lǐng)域,Ballie 本周公開亮相
- 消息稱美光即日起針對(duì)存儲(chǔ)模組產(chǎn)品向美國客戶征收“關(guān)稅附加費(fèi)”
- 迅為IMX6ULL開發(fā)板交叉編譯器的安裝和使用
- 迅為-i.MX6ULL 開發(fā)板-移植OpenCv3.4.1-搭建編譯環(huán)境
- BOE(京東方)董事長提議回購公司股份 堅(jiān)定看好資本市場長期價(jià)值
- 學(xué)知識(shí),贏好禮|泰克半導(dǎo)體材料與器件測(cè)試技術(shù)電源特性篇!
- 2021年STM32中國峰會(huì)暨粉絲狂歡節(jié) 報(bào)名啦!
- LPC4370重磅來襲 有獎(jiǎng)問答贏好禮!
- TE 學(xué)習(xí)中心 視頻培訓(xùn)隨心點(diǎn)
- TI 高精度實(shí)驗(yàn)室信號(hào)鏈精品課大作戰(zhàn)——你學(xué)習(xí)我送禮!
- 下載是德科技精選解決方案,抽獎(jiǎng)贏好禮!
- Microchip 有獎(jiǎng)直播|滿足汽車電池管理系統(tǒng) (BMS) 不斷發(fā)展的安全標(biāo)準(zhǔn)
- 英飛凌MERUS™ D類音頻解決方案|【閱讀贏好禮,下單送開發(fā)板】
- 瑞薩電子最新觸控微控制器R7F0C208入門套件免費(fèi)申請(qǐng),參與申請(qǐng)還能贏好禮!
- “刀片電池”出鞘,能讓比亞迪“笑看天下”嗎?
- MobiledgeX與Savari合作 將移動(dòng)邊緣計(jì)算引入C-V2X解決方案
- Einride展示自動(dòng)駕駛遠(yuǎn)程操控 一位操作員可同時(shí)監(jiān)控10臺(tái)車輛
- MPS聯(lián)合MIT開發(fā)開源自動(dòng)面罩呼吸機(jī)
- u-blox 1000萬瑞士法郎收購IoT通信服務(wù)商Thingstream
- Arduino Pro與Bosch Sensortec聯(lián)手推出Nicla Sense ME
- 料位開關(guān)設(shè)計(jì)中選用的是聚四氟乙烯軸套而不是銅軸套
- 超聲波物位計(jì)應(yīng)用的局限性
- 英特爾:以生態(tài)之力,構(gòu)建城市數(shù)字新基建
- 振棒料位開關(guān)的獨(dú)特結(jié)構(gòu)




 京公網(wǎng)安備 11010802033920號(hào)
京公網(wǎng)安備 11010802033920號(hào)