

1.當前矢量信號分析儀計量校準方法概述
目前常用的信號分析儀(VSA)計量方法采用標準矢量信號源來進行,優(yōu)點是簡單方便易于操作,缺點是無法保證“標準源”的準確性、穩(wěn)定性和重復(fù)性。
國際上的計量機構(gòu),如德國PTB、英國NPL、美國NIST采用高速采樣示波器和多載波信號源,通過同步觸發(fā)裝置進行時間和相位同步并進行系統(tǒng)校準,示波器的采樣值,經(jīng)過軟件程序計算后,作為幅度相位參數(shù)基準,從而實現(xiàn)信號分析儀參數(shù)的計量校準。
多載波信號源+示波器+同步器優(yōu)點是將矢量參數(shù)溯源到功率電平、時間和頻率上,缺點是示波器頻率范圍受限,不確定度較大,同步延時在微波測量時帶來較大的相位誤差,系統(tǒng)復(fù)雜,引入更多的不確定度。
2.本文提出的計量校準技術(shù)
本文提出連續(xù)波頻率偏移法測量信號分析儀的剩余誤差,基于本方法,加入模擬調(diào)制測量信號分析儀的測量準確度。
a.連續(xù)波頻率偏移法:計量信號分析儀的載波頻率誤差、功率誤差、矢量信號分析剩余誤差(表征信號分析儀解調(diào)各項指標的本底噪聲);
b.連續(xù)波頻率偏移附加模擬調(diào)制法:矢量信號分析儀的誤差矢量幅度EVM、幅度誤差和相位誤差的量值準確度校準和檢定
c.多載波法:矢量信號分析儀的I/Q偏移(載波泄漏)的量值準確度校準和檢定
3.量值定義
3.1. I/Q信號
矢量是一個圖解工具,就是在直角坐標系中用一個旋轉(zhuǎn)箭頭描述信號,箭頭的長度代表信號峰值幅度,箭頭與橫軸的正半軸夾角為相位,箭頭逆時針旋轉(zhuǎn)為正方向,每秒鐘旋轉(zhuǎn)的圈數(shù)為頻率。
將信號進行矢量分解,即分解為峰值幅度相同、頻率相同但相位相差90度的兩個分量。通常采用一個余弦信號和一個正弦信號描述這兩個信號。其中余弦分量為同相分量I,正弦分量為正交分量Q。
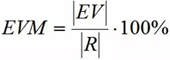
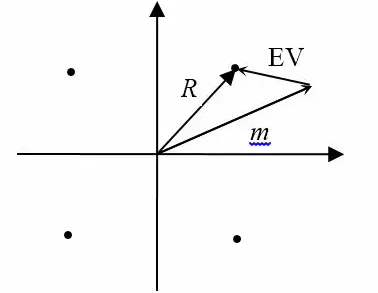
3.2. 誤差矢量幅度(EVM)
誤差矢量(EV)是實際測量信號(m)與理想無誤差參考信號(R)的矢量差。誤差矢量幅度通常表述為其與參考信號幅度的百分比。
3.3. 幅度誤差
實際測量信號(m)與理想無誤差參考信號(R)的幅度差。幅度誤差通常表述為其與參考信號幅度的百分比。
3.4. 相位誤差

實際測量信號(m)與理想無誤差參考信號(R)的相位差。
3.5. 原點偏移
實際測量信號原點與理想無誤差參考信號原點之間矢量差的幅度。通常表述為其與參考信號幅度的比值(dB)。
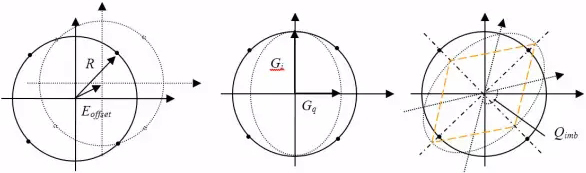
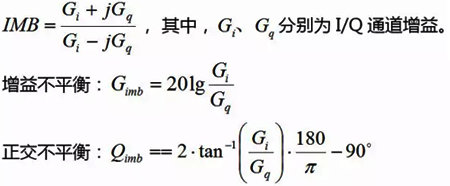
3.6. I/Q不平衡
I/Q不平衡包括幅度(增益) 不平衡和相位(正交)不平衡。
3.7. 載波頻率誤差
實際測量信號頻率與理想無誤差參考信號頻率差。
3.8. 平均功率
實際測量信號的平均功率。
4.連續(xù)波頻率偏移法(CWO)
4.1. 適用范圍
本方法用來測量和評價矢量信號分析儀的解調(diào)分析參數(shù)的剩余固有誤差(VSA噪聲)。
適用于以下數(shù)字調(diào)制方式:MSK, PSK, QAM;
適用于頻譜及矢量信號分析儀的以下參數(shù)的計量校準:
頻率誤差,功率電平誤差,剩余EVM,剩余幅度誤差,剩余相位誤差,I/Q原點偏移(載波泄漏),剩余I/Q不平衡,剩余增益不平衡,剩余相位不平衡
4.2. 計量校準設(shè)備
計量校準設(shè)備是合適頻率范圍的射頻微波信號發(fā)生器,溯源標準參數(shù)是頻率和功率。
4.3. 連續(xù)波頻率偏移法(CWO)原理
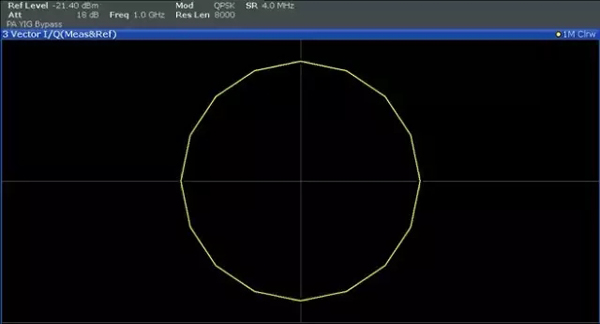
目標是產(chǎn)生校準信號,對應(yīng)矢量信號分析儀(VSA)的響應(yīng)數(shù)字解調(diào)標準星座點,或其中一部分星座點。根據(jù)I/Q矢量解調(diào)原理,通過設(shè)置校準信號與VSA中心頻率差對應(yīng)的I/Q相位差,得到準確的I/Q矢量圖和星座點。
分析數(shù)字調(diào)制方式MSK, PSK 和QAM,發(fā)現(xiàn)其矢量星座圖中包含N個原點對稱的星座點,各星座點幅度相同,我們把這些星座點稱為目標星座點。
經(jīng)過頻率和功率電平溯源的信號發(fā)生器產(chǎn)生的校準信號,即輸入VSA的射頻信號為連續(xù)正弦波,其頻率與VSA的中心頻率具有頻率差Δf。

當ΔΦ等于目標星座點相鄰點相位差,Δt=1/fs(fs是VSA的采樣符號速率)時,在I/Q解調(diào)矢量圖上,此時的理論I/Q曲線對應(yīng)一個圓:2·π·Δf·Δt,由此產(chǎn)生的校準信號對應(yīng)這些目標星座點的標準理想值。
| 調(diào)制方式 | 原點對稱星座點相位差 | 偏移頻率 |
| BPSK | π | 1/2·fs |
| QPSK | π/2 | 1/4·fs |
| 8PSK | π/4 | 1/8·fs |
| 3/8Pi-8PSK | 3π/8 | 3/16·fs |
| DQPSK | π/2 | 1/4·fs |
| D8PSK | 3π/8 | 3/16·fs |
| Pi/4 DQPSK | π/4 | 1/8·fs |
| OQPSK | π | 1/2·fs |
| Pi/4 QPSK | π/4 | 1/8·fs |
| QAM | π/2 | 1/4·fs |
4.4. 測試校準方法
信號發(fā)生器的頻率和功率電平為校準溯源參數(shù),頻率參數(shù):采用信號發(fā)生器連接外參考標準時鐘源,或者采用頻率計或測量接收機監(jiān)測校準;功率電平參數(shù):采用功率計或測量接收機監(jiān)測校準。
被測VSA設(shè)置為校準目標調(diào)制方式,中心頻率在其頻率范圍內(nèi)選擇,符號速率在其指標范圍內(nèi)選擇,對應(yīng)濾波器可不設(shè)(矩形),或為升余弦(RC或Cosine),滾降系數(shù)0.22。
連接信號發(fā)生器與VSA的射頻端口,設(shè)置合適的功率電平,它們的頻率偏差按照上表對應(yīng)的調(diào)制方式設(shè)置。
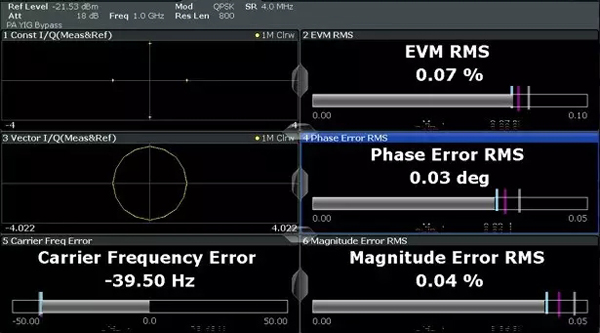
讀取VSA的頻率誤差、功率電平誤差及各項解調(diào)參數(shù)剩余(固有)誤差,如剩余EVM,剩余幅度誤差,剩余相位誤差,I/Q原點偏移(載波泄漏),剩余I/Q不平衡,剩余增益不平衡,剩余相位不平衡。
5.連續(xù)波頻率偏移附加模擬調(diào)制(CWO-MOD)
5.1. 適用范圍
矢量信號分析儀的數(shù)字矢量解調(diào)參數(shù)的量值準確度校準和檢定:
· EVM、幅度誤差和相位誤差。
5.2. 計量校準裝置
計量校準裝置是具有模擬調(diào)制功能(AM,FM,PM)的射頻微波信號發(fā)生器,溯源標準參數(shù)是頻率和功率、模擬調(diào)制度。
5.3. 測試原理
在連續(xù)波頻率偏移法的基礎(chǔ)上,附加可溯源的模擬調(diào)制,模擬調(diào)制的量值與數(shù)字矢量調(diào)制的量值具有準確并唯一的對應(yīng)關(guān)系。
通過連續(xù)波頻率偏移法,在VSA的目標星座點處產(chǎn)生標準參考信號,通過調(diào)幅預(yù)設(shè)幅度失真,通過調(diào)頻或調(diào)相預(yù)設(shè)相位失真。以上預(yù)設(shè)失真值作為標準參考值,從而測量和檢定矢量信號分析儀的數(shù)字矢量解調(diào)EVM、幅度誤差和相位誤差的量值準確度。
5.4. 測試校準方法
信號發(fā)生器的校準溯源參數(shù)包括,頻率和功率電平,模擬調(diào)制頻率和調(diào)制度。
· 頻率參數(shù):采用信號發(fā)生器連接外參考標準時鐘源,或者采用頻率計或測量接收機監(jiān)測校準;
· 功率電平參數(shù):采用功率計或測量接收機監(jiān)測校準;
· 模擬調(diào)制參數(shù):調(diào)制度分析儀或測量接收機監(jiān)測校準。
被測VSA設(shè)置為校準目標調(diào)制方式,中心頻率在其頻率范圍內(nèi)選擇,符號速率在其指標范圍內(nèi)選擇,其數(shù)值遠大于信號發(fā)生器模擬調(diào)制頻率,測量點數(shù)遠大于符號率與調(diào)制頻率的比值。對應(yīng)濾波器可不設(shè)(矩形),或為升余弦(RC或Cosine),滾降系數(shù)0.22。
連接信號發(fā)生器與VSA的射頻端口,設(shè)置合適的功率電平,它們的頻率偏差Δf按照上表對應(yīng)的調(diào)制方式設(shè)置。
設(shè)置調(diào)幅(AM)調(diào)制方式,調(diào)制頻率遠小于符號率,預(yù)設(shè)調(diào)制度作為校準參考標準值,以調(diào)制度分析儀或測量接收機的AM調(diào)制度讀數(shù)為基準(am%),同時讀取剩余調(diào)相PM調(diào)制度(pm°)。
讀取VSA的幅度誤差Emag%,其峰值(Peak)對應(yīng)am%的峰值(PK),均方根值(RMS)對應(yīng)am%的均方根值(RMS)。
幅度誤差測量準確度:Emag% - am%。
讀取VSA的誤差矢量幅度EVM%,理論參考由AM調(diào)制度am%和剩余pm構(gòu)成
· AM校準信號的AM調(diào)制度,對應(yīng)幅度誤差設(shè)定值
EVM_am ~ am%
· AM校準信號的剩余調(diào)相為pm°,對應(yīng)誤差
EVM_pm=2·sin(pm·π/360)*100%
· 參考均方根值,均方根值EVM測量準確度:
EVM = SQRT(EVM_am^2+EVM_pm^2) ≈EVM_am = am%
設(shè)置調(diào)相(PM)調(diào)制方式,調(diào)制頻率遠小于符號率,預(yù)設(shè)調(diào)制度作為校準參考標準值,以調(diào)制度分析儀或測量接收機的PM調(diào)制度讀數(shù)(pm°)為基準,同時讀取剩余調(diào)幅am%。
· PM校準信號的PM調(diào)制度,對應(yīng)相位誤差設(shè)定值
EVM_pm ~2·sin(pm·π/360)*100%
· AM校準信號的剩余調(diào)相為am,對應(yīng)誤差
EVM_am ~ am%
· 參考均方根值,均方根值EVM測量準確度:
EVM = SQRT(EVM_am^2+EVM_pm^2) ≈EVM_pm
6.連續(xù)波頻率偏移多載波法
6.1. 適用范圍
矢量信號分析儀的原點偏移(本振泄漏)量值準確度校準和檢定:
6.2. 計量校準裝置
計量校準裝置是多載波信號發(fā)生器或并供參考的獨立的兩臺信號發(fā)生器,溯源標準參數(shù)是頻率和功率。
6.3. 測試原理和方法
在連續(xù)波頻率偏移法的基礎(chǔ)上,在VSA的目標星座點處產(chǎn)生標準參考信號,在VSA中心頻點輸入另一個連續(xù)波信號,代表本振泄漏電平,泄漏電平與參考信號電平之比,即原點偏移。
信號發(fā)生器產(chǎn)生兩個不同頻率和電平的信號,輸入VSA。
6.4. 測試校準方法
信號發(fā)生器的頻率和功率電平為校準溯源參數(shù),頻率參數(shù):采用信號發(fā)生器連接外參考標準時鐘源,或者采用頻率計或測量接收機監(jiān)測校準;功率電平參數(shù):采用功率計或測量接收機監(jiān)測校準。
被測VSA設(shè)置為校準目標調(diào)制方式,中心頻率在其頻率范圍內(nèi)選擇,符號速率在其指標范圍內(nèi)選擇,對應(yīng)濾波器可不設(shè)(矩形),或為升余弦(RC或Cosine),滾降系數(shù)0.22。
連接信號發(fā)生器與VSA的射頻端口,信號發(fā)生器產(chǎn)生兩個不同頻率和電平的信號,輸入VSA。通過連續(xù)波頻率偏移法,設(shè)置第一載波頻率,在VSA的目標星座點處產(chǎn)生標準參考信號;在VSA中心頻點處,輸入第二載波信號,其電平小于第一載波。兩個電平差值對應(yīng)原點偏移。
7.總結(jié)
以目前常用的信號分析儀(VSA)的測試情況來看,由于計量信號是單載波連續(xù)波,儀器在VSA解調(diào)測試時通常會發(fā)出警告,提示本信號并非數(shù)字調(diào)制信號,但是不影響EVM以及頻率、幅度和相位誤差的測試結(jié)果。
根據(jù)本文的連續(xù)波頻率偏移法,測量信號分析儀的MSK、PSK和QAM解調(diào)的剩余誤差是可行的。另外,利用可溯源的模擬調(diào)制,測量信號分析儀的測量準確度。
上一篇:如何用實時頻譜分析儀應(yīng)對干擾挑戰(zhàn)
下一篇:基于R&S頻譜與信號分析儀的寬帶 Doherty功放線性化性能評估
推薦閱讀
史海拾趣
為了進一步擴大市場份額和提升競爭力,Axon' Cable公司開始實施全球化戰(zhàn)略。公司在全球范圍內(nèi)設(shè)立了多個生產(chǎn)基地和研發(fā)中心,積極開拓國際市場。同時,Axon' Cable還加強了與國際知名企業(yè)的合作,共同推動技術(shù)創(chuàng)新和產(chǎn)業(yè)升級。這些舉措使得Axon' Cable的產(chǎn)品在全球范圍內(nèi)得到了廣泛應(yīng)用,公司的國際影響力也逐步提升。
Falco Electronics非常重視企業(yè)文化建設(shè)。公司倡導(dǎo)“以人為本”的管理理念,注重員工的成長和發(fā)展。公司為員工提供了良好的工作環(huán)境和福利待遇,還定期開展各種培訓(xùn)活動,幫助員工提升技能水平。這種良好的企業(yè)文化吸引了大量優(yōu)秀人才的加入,也為公司的持續(xù)發(fā)展提供了有力保障。
在全球化趨勢的推動下,安國國際積極拓展海外市場,與全球多家知名企業(yè)和研究機構(gòu)建立了緊密的合作關(guān)系。通過與國際伙伴的技術(shù)合作和市場共享,安國得以更快地了解市場需求和技術(shù)動態(tài),加速產(chǎn)品研發(fā)和市場推廣。同時,公司還加強了對全球供應(yīng)鏈的管理和優(yōu)化,確保產(chǎn)品質(zhì)量和交貨期的穩(wěn)定性。這些舉措為安國國際在全球市場的競爭提供了有力支持。
這五個故事展示了安國國際在電子行業(yè)中的發(fā)展歷程和取得的成就。從創(chuàng)業(yè)初期的USB鍵盤集線器控制芯片研發(fā)到產(chǎn)品線拓展、組織架構(gòu)調(diào)整、專注于U盤控制IC開發(fā)以及全球化布局與合作伙伴關(guān)系的建立,安國國際始終堅持以技術(shù)創(chuàng)新為驅(qū)動,以市場需求為導(dǎo)向,不斷提升自身的核心競爭力和市場份額。
自成立以來,博流公司一直致力于物聯(lián)網(wǎng)、車聯(lián)網(wǎng)和智能穿戴領(lǐng)域集成電路芯片的研發(fā)。經(jīng)過不斷的技術(shù)創(chuàng)新和突破,公司成功推出了多款具有競爭力的芯片產(chǎn)品,廣泛應(yīng)用于智能家居、智慧城市、智能制造等領(lǐng)域。同時,博流還注重與物聯(lián)網(wǎng)生態(tài)合作伙伴的緊密合作,共同提供端到端、邊緣計算到云的整體解決方案,為客戶創(chuàng)造價值。
隨著無線通信技術(shù)的快速發(fā)展,Astron Wireless Technologies Inc公司面臨著來自同行的競爭壓力。為了保持競爭優(yōu)勢,公司不斷加大研發(fā)投入,推出了一系列具有更高性能、更低成本的無線通信產(chǎn)品。同時,公司還加強了與客戶的溝通與合作,及時了解市場需求變化,并根據(jù)客戶需求進行產(chǎn)品調(diào)整和優(yōu)化。這些措施使得公司在激烈的市場競爭中保持了領(lǐng)先地位。
隨著市場的不斷發(fā)展,Corsair意識到只有不斷創(chuàng)新才能在競爭中立于不敗之地。因此,公司加大了對研發(fā)的投入,積極引進先進技術(shù)和設(shè)備,不斷提升產(chǎn)品的性能和質(zhì)量。在一次次的嘗試和失敗后,Corsair的研發(fā)團隊終于突破了行業(yè)技術(shù)瓶頸,成功開發(fā)出了一款具有高性能、高穩(wěn)定性的連接器產(chǎn)品。這一創(chuàng)新成果不僅贏得了客戶的青睞,也為公司在行業(yè)中樹立了良好的口碑。
|
傳感器接近開關(guān)10-36VDC/200mA/4mmLJ18A3-4-Z/BX 樂清市新歐傳感器有限公司1傳感器接近開關(guān)10-36VDC/200mA/8mmLJ18A3-8-Z/BX 樂清市新歐傳感器有限公司1傳感器接近開關(guān)黃色/塑料/大 1傳感器光電二極管發(fā)射管EL-1KL3 2傳感器光電三極管接 ...… 查看全部問答∨ |
|
|
因為要控溫,所以要不停的通過IIC接口向從機寫數(shù)據(jù),就出問題了,有時寫不進去,查了一下是因為IICCON[4]中斷位沒有清0,不知為什么,哪位高手遇到過這個問題,怎么解決的? void WrIIC(__u8 slvAddr, __u8 cmd, __u16 data) { &n ...… 查看全部問答∨ |
|
|
# Flags: CFLAGS = -Wall -g -I$(INC_PATH) CFLAGS += -c -mcpu=arm9tdmi -mlittle-endian CFLAGS += -O -D ARM_GCC 其中INC_PATH = ./Include 這3句代碼有什么特別的意義嗎?可以去掉或者忽略嗎?誰能詳細解釋下,謝謝… 查看全部問答∨ |
a) 暑期嵌入式特色強化培訓(xùn)課程 i. 嵌入式Linux驅(qū)動與內(nèi)核強化培訓(xùn)班 1. 課程目標 ◆ 掌握Linux操作系統(tǒng)及內(nèi)核; ◆ 掌握ARM體系結(jié)構(gòu); ◆ 掌握嵌入式技術(shù) ...… 查看全部問答∨ |
|
PDA開發(fā)的的問題:高手要是不來看看這世上又要多一個瘋子拉! 小女只是單片機初學(xué)者,應(yīng)用過MCS-51設(shè)計過簡單的課程設(shè)計,電路還不是特別明白,現(xiàn)在在一家公司上班,老大兒卻讓我用ARM7開發(fā)一個無線的PDA設(shè)備,給我一個系統(tǒng)的大致流程圖,還不能叫做流程圖,就叫功能與操作描述吧,然后問我這些能不能做出這個P ...… 查看全部問答∨ |
|
|
這就是國產(chǎn)的開關(guān)電源,一百多元一個,其參數(shù)如下: AC INPUT : 220V+-20%DC OUTPUT: V1 5V6.0AV2 12V1Av3 -12V1A [ 本帖最后由 dongguanze 于 2011-7-31 10:12 編輯 ]… 查看全部問答∨ |
看到很多朋友希望能有一個學(xué)習(xí)launchpad的教程,大家想怎樣學(xué)呢?以實驗為主體,或者先介紹各模塊結(jié)構(gòu),再輔以試驗?或者大家有什么想法?… 查看全部問答∨ |






- 不可錯過的低功耗神器Otii:重新定義功耗優(yōu)化設(shè)計
- 普源精電RIGOL推出MHO2000系列高分辨率示波器
- 是德科技推出1.6T平臺和自動化網(wǎng)絡(luò)互連性能驗證軟件
- 是德科技新增快速、緊湊型測試儀器,擴展射頻和微波產(chǎn)品組合
- 是德科技發(fā)布全新采樣示波器,革新1.6T光學(xué)收發(fā)器測試
- 是德科技推出AI網(wǎng)絡(luò)可視性以增強網(wǎng)絡(luò)安全
- 【應(yīng)用案例】 RIGOL高速伺服激光加工系統(tǒng)MIPI D-PHY一致性測試
- 是德科技和 Capgemini 合作加速驗證再生和透明非地面網(wǎng)絡(luò) RAN
- 是德科技和 Mavenir 合作加速推進移動性及多用戶 MIMO 測試






 STM32L4P5CGU6P
STM32L4P5CGU6P- 從實驗室到工業(yè)場景:優(yōu)艾智合密集發(fā)布7款人形機器人
- 地表最酷人形機器人,拿下新一輪2億元融資
- 自動駕駛警示:沒有企業(yè)能完全避免自動駕駛在復(fù)雜環(huán)境中的失誤
- 高階就高級嗎?我們到底該如何使用智能駕駛輔助?
- 即將迎來第三代?嵐圖固態(tài)電池研發(fā)進展曝光
- 一文了解2025年3月的固態(tài)電池大事件!
- 傳統(tǒng)鋰電、半固態(tài)、固態(tài)電池終極對決:誰將主宰新能源未來?
- 國產(chǎn)智駕迎戰(zhàn)特斯拉FSD,背后AI含量差幾何?
- 左手AI,右手機器人,半導(dǎo)體巨頭英飛凌的新故事
- 激光雷達的復(fù)仇
- 有獎答題|TE《新能源應(yīng)用解決方案白皮書》
- 2016年是德印象測試微視頻網(wǎng)絡(luò)競選(大中國區(qū))
- PI有獎問答之聚焦PI InnoSwitch-CH
- TI有獎直播:伺服驅(qū)動器中電流和電壓測量解決方案
- 6月4日上午10:00直播:英飛凌柵極驅(qū)動芯片的應(yīng)用以及安富利對應(yīng)的解決方案
- NI白皮書下載《如何克服復(fù)雜待測設(shè)備的生產(chǎn)測試挑戰(zhàn)》
- 已結(jié)束 |TI 新一代 MSP430™ 產(chǎn)品在低成本超聲波水表中的方案介紹及快速應(yīng)用指南
- 參與WEBENCH設(shè)計大賽,輕松體驗設(shè)計真諦!







 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號