引言
本系統(tǒng)選取了32位TMS320F28027作為運動物體的控制中心。TMS320F28027具有豐富的資源,擁有32位架構(gòu)、高級外設(shè)、高度的模擬集成、高達(dá)128 KB的快閃存儲器,同時還包括功能強大的ADC、高分辨率PWM以及濕著增強的捕獲單元等眾多特性優(yōu)異的組件、高精度片上振蕩器、模擬比較器、上電復(fù)位與掉電保護(hù)等在內(nèi)的各種集成模塊。本文以電動車蹺蹺板的設(shè)計為例,介紹了TMS320F28027的PWM電機調(diào)速、A/D采樣、中斷和I/O口等的操作和控制,以及LCD、L298n、紅外循跡等外部擴(kuò)展硬件的連接技巧和方法。
1 小車功能介紹
1.1 按鍵和顯示功能
按鍵操作:使用3個按鍵分別進(jìn)行選擇、確認(rèn)、退出功能操作,在系統(tǒng)上電后,顯示界面進(jìn)入主菜單,通過“選擇”按鍵塒“板上尋平衡”、“上板尋平衡”兩個功能進(jìn)行選擇,選定結(jié)束按下“確認(rèn)”鍵,系統(tǒng)進(jìn)入對應(yīng)函數(shù),此時可以按下“退出”鍵退出對應(yīng)的功能函數(shù)。
顯示功能:LCD實時顯示小車的傾角和小車正在執(zhí)行的功能,成功完成一項操作后LCD給出“OK”的指示,同時在每項操作進(jìn)行時顯示其操作所用時間,完成所有任務(wù)后顯示出每項操作所耗時間。
1.2 “板上尋平衡”功能
在不加配重的情況下,電動車完成以下運動:
①電動車從起始端點A出發(fā),快速行駛到中心點C附近;
②電動車在中心點C附近盡快使蹺蹺板處于平衡狀態(tài),保持平衡5 s,并給出明顯的平衡指示;
③電動車從步驟②中的平衡點出發(fā),快速行駛到蹺蹺板末端B處(車頭距蹺蹺板末端B不大于50 mm);
④電動車在B點停止5 s后,快速倒退回起始端A,完成整個行程;
⑤在整個行駛過程中,電動車始終在蹺蹺板上,并分階段實時顯示電動車行駛所用的時間。
其中,到達(dá)C點附近和倒退回A點有紅外循跡裝置配合循跡標(biāo)志完成,尋找平衡主要由傾角傳感器檢測小車狀態(tài)控制小車前后移動完成。
1.3 “上板尋平衡”功能
將配重固定在可調(diào)整范圍內(nèi)任一指定位置,電動車完成以下運動:
①將電動車放置在地面距離蹺蹺板起始端A點300 mm以外、90°扇形區(qū)域內(nèi)某一指定位置(車頭朝向蹺蹺板),電動車能夠自動駛上蹺蹺板,如圖1所示。

②電動車在蹺蹺板上取得平衡,給出明顯的平衡指示,保持平衡5 s以上。
③將另一塊質(zhì)量為電動車質(zhì)量10%~20%的塊狀配重放置在如圖2所示中A至C間指定的位置,電動車能夠重新取得平衡,給出明顯的平衡指示,保持平衡5 s以上。

1.4 跑道和小車介紹
(1)小車跑道
跑道分為兩個部分:矩形部分的蹺蹺板和扇形部分的地面區(qū)域。圖2中兩側(cè)箭頭代表循跡標(biāo)識,蹺蹺板中間箭頭為后退的循跡標(biāo)識。在蹺蹺板中部C點放置蹺蹺板支架,保證蹺蹺板可自由擺動。
(2)小車循跡模塊安裝位置
主要介紹小車循跡模塊的安裝位置,以保讓小車能夠正確循跡。前進(jìn)循跡由小車前部左右各兩路的紅外循跡裝置完成,位置配合蹺蹺板上前進(jìn)循跡線安裝。后退循跡由小車后部的4路紅外循跡裝置完成,位置配合蹺蹺板上后退循跡線安裝。安裝位置如圖3所示。

2 功能模塊電路連接
2.1 系統(tǒng)總體模型
TI公司32位DSP TMS320F28027為系統(tǒng)的控制芯片,系統(tǒng)通過7 V穩(wěn)壓直流電源給電機供電,同時7 V穩(wěn)壓電源經(jīng)LM8965穩(wěn)壓模塊輸出5V電壓后給其他模塊供電。在上電過后使用獨立按鍵配合LCD12864實現(xiàn)功能選擇,選擇功能結(jié)束,小車在紅外循跡模塊的引導(dǎo)下到達(dá)指定地點開始尋找平衡,此時系統(tǒng)對傾角傳感器輸出電壓進(jìn)行A/D采樣并將數(shù)據(jù)傳輸給芯片處理,然后芯片輸出信號對L298N驅(qū)動的直流電機進(jìn)行調(diào)節(jié),配合光電碼盤控制小車在蹺蹺板上移動以實現(xiàn)平衡點尋找。系統(tǒng)框圖如圖4所示。

2.2 L298N驅(qū)動連接電路
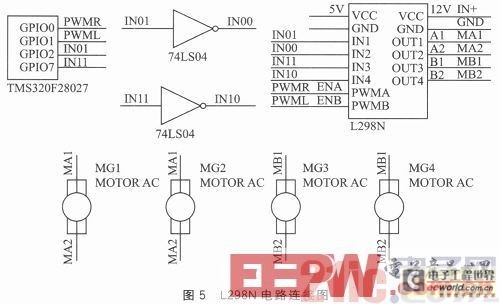
L298N是一塊雙H橋直流電機驅(qū)動芯片,主要是對直流電機進(jìn)行PWM轉(zhuǎn)速調(diào)節(jié),對步進(jìn)電機進(jìn)行PWM細(xì)分操作。驅(qū)動部分的端子電壓Vs在+5~+35 V,承載最大電流為2 A;邏輯部分的工作電壓為5~7 V,電流為0~36 mA,低電平有效值為-0.3~1.5 V,高電平有效值為2.3 V~Vss。該驅(qū)動板可驅(qū)動2路直流電機,使能端ENA、ENB為高電平時有效,設(shè)置IN1和IN2的輸入電平確定電機的轉(zhuǎn)動方向,改變輸入使能端PWM脈沖的占空比實現(xiàn)調(diào)速。(注意:當(dāng)使能信號為0時,電機處于自由停止?fàn)顟B(tài);當(dāng)使能信號為1,且IN1和IN2為00或11時,電機處于制動狀態(tài),阻止電機轉(zhuǎn)動。)
由于小車采用的是左右兩側(cè)速度差轉(zhuǎn)向,所以為了節(jié)省I/O口,電機連接時使用一個I/O配合使能端控制一側(cè)的兩個電機的轉(zhuǎn)向和轉(zhuǎn)速使能端控制轉(zhuǎn)速,I/O口控制轉(zhuǎn)向。具體操作:同側(cè)的兩個電機并聯(lián),電機一端通過I/O口經(jīng)L298N控制,另一端從同一I/O口引出一根信號線經(jīng)一非門后由L298N控制。具體電路連接如圖5所示(其中MG1~MG4為4個直流電機)。
方向設(shè)定主要函數(shù)如下:


配合循跡模塊即可實現(xiàn)小車循跡功能。循跡模塊分為前后4路,前4路的4個信號端口與后4路并聯(lián),前4路的4個紅外循跡模塊由一個I/O口供電,后4路供電由此I/O口經(jīng)一非門供給。只需改變此I/O的高低電平即可完成前后循跡模塊的切換。循跡程序框圖如圖6所示。

循跡主要程序如下:


2.3 LCD12864電路連接
為了節(jié)省I/O口,顯示選用的LCD為SPI傳輸型,主要用于必要數(shù)據(jù)顯示以及菜單和系統(tǒng)狀態(tài)顯示。該模塊一共有10個引腳,其中除去電源引腳和空引腳還有RET引腳用于上電復(fù)位,CS引腳傳輸主從狀態(tài)選擇,SCK引腳時鐘信號輸入,SDA引腳數(shù)據(jù)輸入,BUSY引腳判忙接口。由于I/O口的限制,我們采用的并非SPI數(shù)據(jù)傳輸模式,而是選用的模擬SPI數(shù)據(jù)傳輸。模擬SPI主要是對數(shù)據(jù)傳輸時序進(jìn)行模擬。
模擬SPI數(shù)據(jù)傳輸,只能對數(shù)據(jù)進(jìn)行一位一位的傳輸。因為此時序為上升沿觸發(fā),所以在傳輸之前時鐘信號置低,傳輸結(jié)束后置高。但是程序的編寫比較麻煩,因為此LCD的命令和數(shù)據(jù)都是8位數(shù)據(jù)。所以選擇按位與加移位實現(xiàn)輸入8位數(shù)據(jù),具體程序如下:

在實際操作中,每次上電需要對LCD進(jìn)行復(fù)位設(shè)置(RST先置低10 ms左右,然后置高20 ms左右)這樣才能保證LCD正常顯示,同時在命令和數(shù)據(jù)傳輸之前需要對LCD進(jìn)行初始化操作,即對LCD進(jìn)行清屏操作(清除上電一瞬間的亂碼顯示),然后根據(jù)需求進(jìn)行亮度設(shè)置。由于此設(shè)計中LCD只需進(jìn)行數(shù)據(jù)的接收,所以CS片選端直接接地,設(shè)置LCD為從輸入設(shè)備即可。具體電路連接如圖7所示。

2.4 傾角傳感器電路連接
傾角傳感器選用的是數(shù)字信號傳輸?shù)腗MA7361,此模塊能夠檢測器件的X/Y/Z三軸的傾斜角度,以及期間的加速度。小車在蹺蹺板上尋找平衡只需一個軸檢測傾角即可,所以任選一軸與小車車面平行,豎直指向車頭即可。
當(dāng)小車發(fā)生前后傾斜時,輸出電壓改變,通過輸出電壓的線性變化反映小車的傾角、運動加速度,以及運動的方向。通過A/D采樣進(jìn)行相應(yīng)的電壓/角度、電壓/加速度轉(zhuǎn)換,這樣便可以時刻調(diào)節(jié)小車姿態(tài)。
傾角傳感器A/D采樣程序設(shè)定如下:


結(jié)語
本文只用了TMS320F28027的部分功能,算法也比較簡單,只是為大家的學(xué)習(xí)交流拋磚引玉而已。TMS320F28027還有很多強大的功能,有待以后大家的學(xué)習(xí)和使用。
個人的使用經(jīng)驗表明TMS320F28027運算速度快,而且操作簡單易學(xué),不僅適合完成各種業(yè)余的電子設(shè)計制作,而且也能滿足專業(yè)人士的大部分需求,是性價比較高的芯片。在配合外部擴(kuò)展硬件的使用過程中,需仔細(xì)閱讀TMS320F28027和硬件模塊的電氣參數(shù),以防止元器件的損毀。
上一篇:基于DSP+CPLD的嵌入式高速圖像通信系統(tǒng)設(shè)計
下一篇:一種基于DSP和無線傳輸技術(shù)的實時監(jiān)測系統(tǒng)設(shè)計
推薦閱讀最新更新時間:2024-05-02 23:07

 智能儀器設(shè)計基礎(chǔ) (王祁)
智能儀器設(shè)計基礎(chǔ) (王祁) 實用電源技術(shù)手冊磁性元器件分冊
實用電源技術(shù)手冊磁性元器件分冊- 生于毫末,成于萬象——德州儀器推出全球超小尺寸MCU
- 歐盟 CRA 落地,開源軟件何去何從?
- 一篇文章帶您玩轉(zhuǎn)T113的ARM+RISC-V+DSP三核異構(gòu)!-米爾電子
- 意法半導(dǎo)體STM32WBA6新系列高集成度無線微控制器, 集更多功能、性能和能效于一身
- 貿(mào)澤開售適用于AI和嵌入式應(yīng)用的 全新Raspberry Pi Compute Module 5
- 從創(chuàng)新平臺到行業(yè)落地:萊迪思Nexus 2驅(qū)動AI市場應(yīng)用
- 釋放 AI 潛能,Arm 計算平臺構(gòu)建計算與存儲的未來
- 實現(xiàn)真正無人駕駛的三個問題
- 整車電氣線束布置過程中的設(shè)計原則







- DeepSeek動搖不了英偉達(dá)的“芯片帝國”?
- 現(xiàn)代摩比斯在電氣化轉(zhuǎn)型中擴(kuò)大車載芯片生產(chǎn)
- 中控屏排行榜:新勢力們卷了半天,能上榜的沒幾個?
- 沃爾沃汽車?yán)萌斯ぶ悄芎吞摂M世界打造更安全的汽車
- 洛陽基地開工,寧德時代打造全球電池重鎮(zhèn)
- 全球安全法規(guī)倒逼傳感升級,艙內(nèi)雷達(dá)將加速上車
- 2月動力電池榜出爐!弗迪電池9倍增幅,欲復(fù)制乘用車神跡
- 比亞迪超級e平臺開啟「油電同速」新時代
- 英飛凌首次登頂全球MCU市場,但挑戰(zhàn)猶存
- 2025年1月中國乘用車新車激光雷達(dá)TOP3供應(yīng)商份額達(dá)92.2%
- 用“ADI實驗室電路”講故事,正式啟動!
- 平頭哥RVB2601開源應(yīng)用方案征集來啊~100套板卡助陣,天貓精靈智能套裝禮品組等你抱走~
- 有獎直播|ADI 慣性MEMS應(yīng)用那些事
- [有獎轉(zhuǎn)發(fā)]Vishay新能源、航天/軍工解決方案
- 免費下載|TE 白皮書《暖通空調(diào)制冷系統(tǒng)中壓力傳感器的重要性》
- 勞動節(jié)歸來,EEWORLD社區(qū)4月明星人物出臺嘍!
- 有獎直播:TI 的故事—— IC 創(chuàng)世紀(jì)
- 發(fā)現(xiàn)之旅,讓你身邊的電源無處可藏!
- 學(xué)習(xí)Altera《SoC FPGA:體系結(jié)構(gòu)重要嗎?》文章,答題贏好禮!
- 不可錯過的一次邂逅,TTI攜TE傳感器樣片與你相見!免費樣片申請活動開始啦~
- 是德Ixia事業(yè)部與Marvell聯(lián)手,首次演示完整12.8 Tbps 400GE測試
- 中國康復(fù)機器人喜獲FDA,落地美國頂尖康復(fù)中心
- 兆芯:為國產(chǎn)軟硬件技術(shù)應(yīng)用獻(xiàn)計獻(xiàn)策
- 華為:我們最合適做智能家居與手機的聯(lián)動
- ST IH系列IGBT 在軟開關(guān)電路實現(xiàn)最佳導(dǎo)通和開關(guān)性能
- STM8S103F3P6核心板學(xué)習(xí)筆記
- STM8S103之tim1PWM輸出
- ATmega32單片機最簡單的程序—閃爍燈
- avr單片機的編譯器介紹
- ATmega32單片機匯編程序




 京公網(wǎng)安備 11010802033920號
京公網(wǎng)安備 11010802033920號